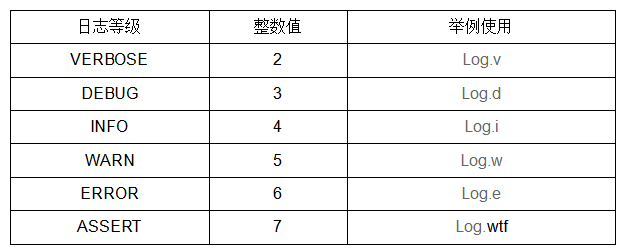
1、日志接口 日志接口内容,共分为java层、native层、kernel层等。下面就对每个层级的内....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-23 16:27
•2171次阅读
配置ROS驱动功能包 将WHEELTEC 100N的 ROS_SDK 保存在工作空间的src文件夹下....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 18:13
•3354次阅读

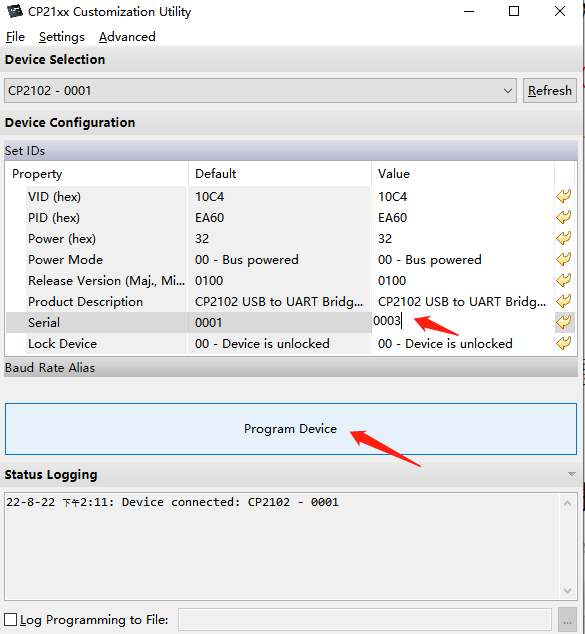
配置固定串口设备 在linux中设备接到哪个串口号上是随机的,为解决这个问题,可以先将N100 设备....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 17:58
•2158次阅读
车联网、自动驾驶、无人驾驶、汽车智能化、网联化等成为了汽车行业的热点话题,未来汽车一定是朝着安全、可....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 17:52
•4918次阅读
Launch文件解析 先来看下刚才运行的launch文件,里边启动了四个节点,分别是: 小海龟仿真器....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 17:44
•1735次阅读
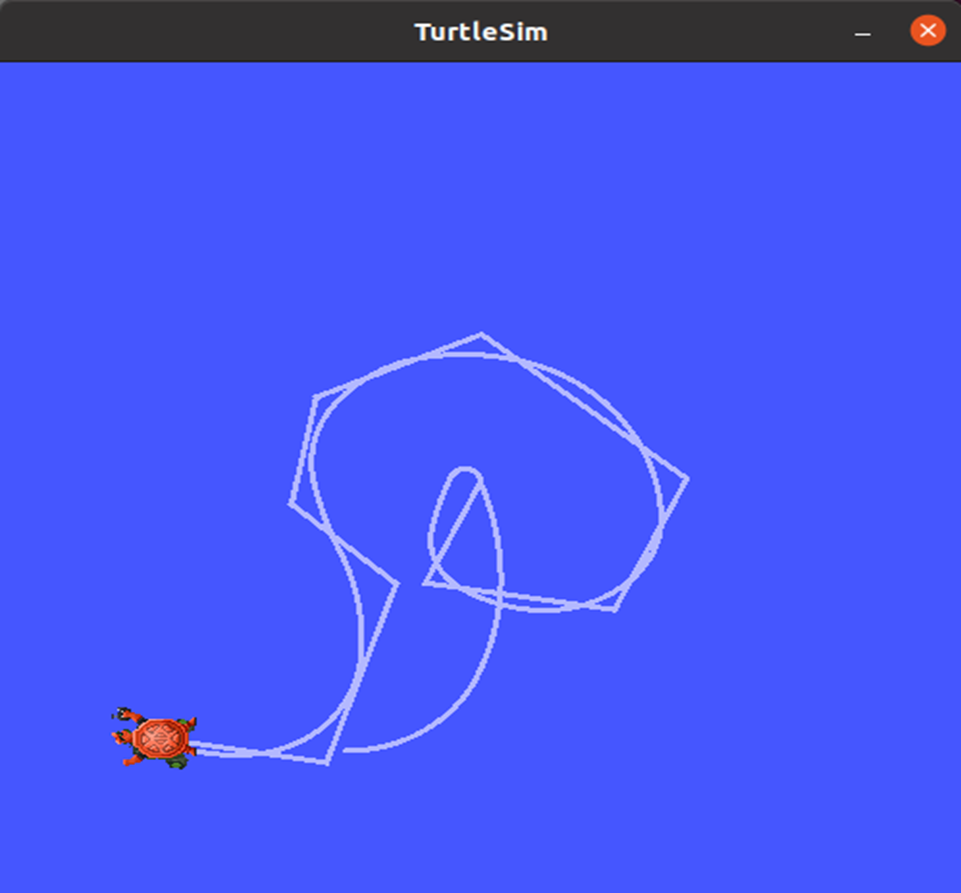
海龟跟随功能解析 运行效果 先看下实现的效果,启动终端后,通过如下命令启动例程: ** ros2 l....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 17:35
•1812次阅读
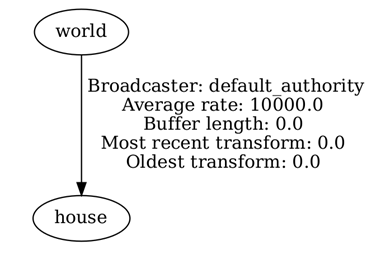
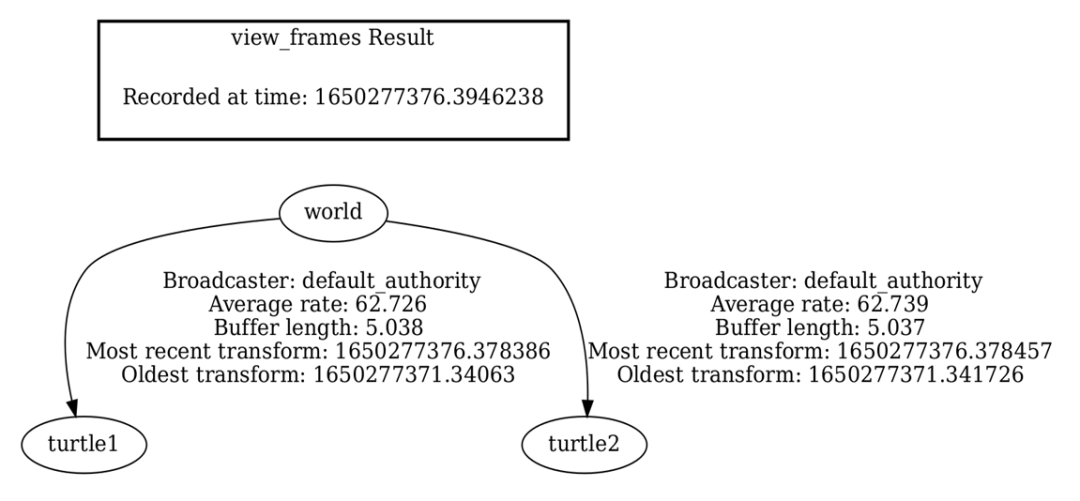
静态TF广播 我们说TF的主要作用是对坐标系进行管理,那就管理一个试试呗? 坐标变换中最为简单的应该....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 17:31
•2021次阅读
TF命令行操作 ROS中的TF该如何使用呢?我们先通过两只小海龟的示例,了解下基于坐标系的一种机器人....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 17:24
•3244次阅读
坐标系是我们非常熟悉的一个概念,也是机器人学中的重要基础,在一个完整的机器人系统中,会存在很多坐标系....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 17:20
•3121次阅读

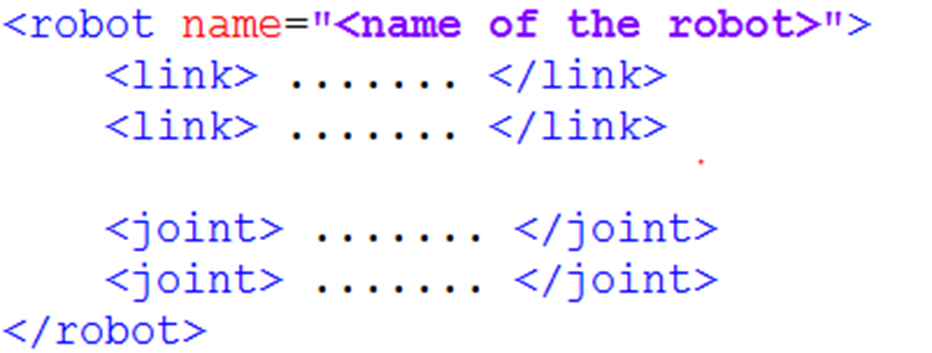
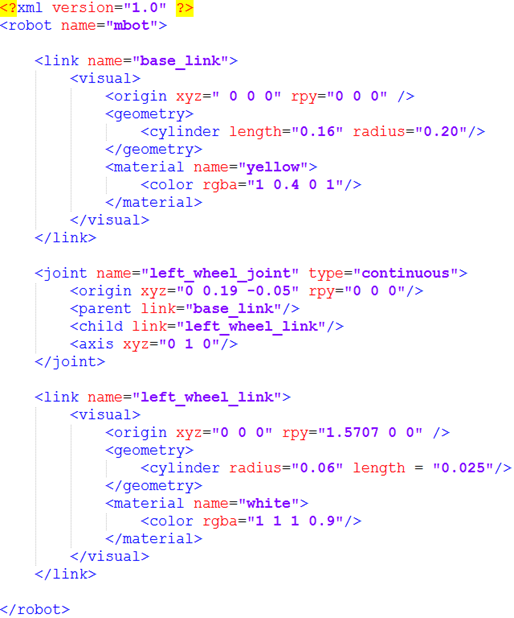
完整机器人模型 所有的link和joint标签完成了对机器人每个部分的描述和组合,全都放在一个rob....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 17:09
•2185次阅读
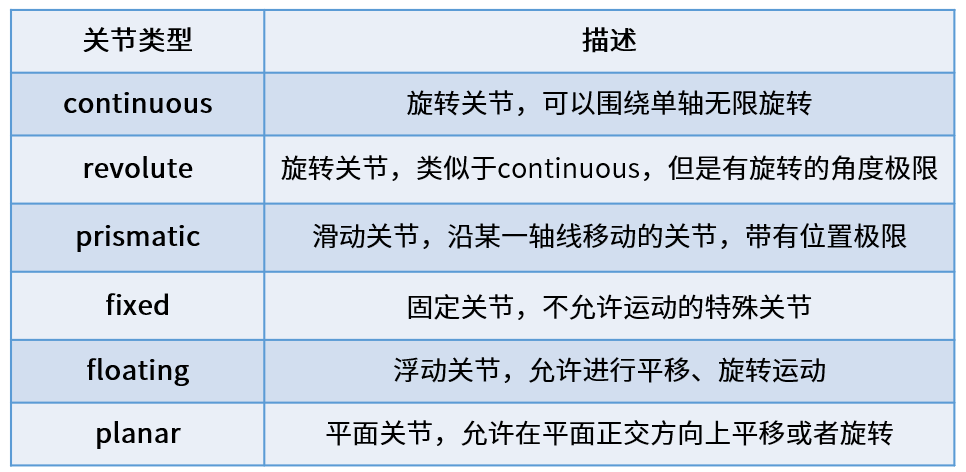
机器人模型中的刚体最终要通过关节joint连接之后,才能产生相对运动。 URDF中的关节有六种运动类....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 16:51
•3739次阅读
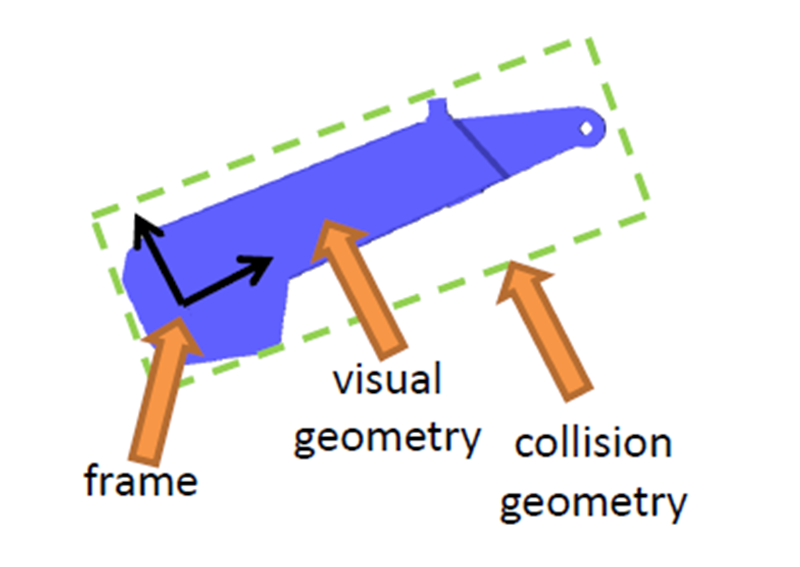
标签用来描述机器人某个刚体部分的外观和物理属性,外观包括尺寸、颜色、形状,物理属性包括质量、惯性矩阵....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 16:39
•1789次阅读
URDF:机器人建模方法 ROS是机器人操作系统,当然要给机器人使用啦,不过在使用之前,还得让ROS....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 16:30
•1930次阅读
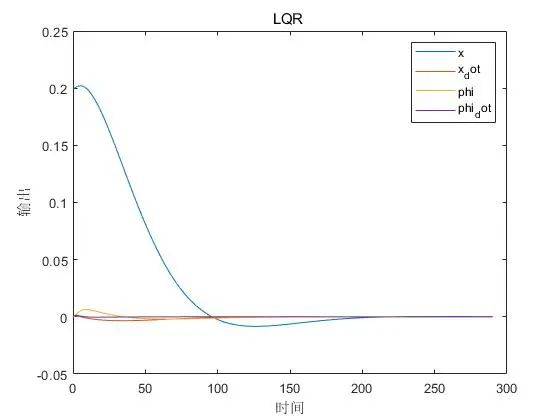
程序实现: 在MATLAB中可采用的语法为: [K,S,P] = l qr(sys,Q,R,N) [....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 16:20
•1179次阅读
为实现与环境的安全、柔顺交互,需要将机器人期望动力学行为与接触环境所表现出来的特征进行匹配。定性地分....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 15:59
•1371次阅读
随着自动化技术的不断进步,机器臂(Robotic Manipulator)在喷涂、上下料、分拣、码垛....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 15:57
•2124次阅读
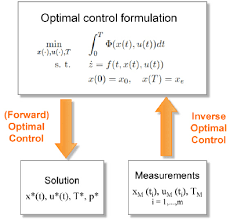
机器人在执行期望目标任务时,我们希望机器人能精确地达到人类所预设的目标,那么我们就来理解下什么是最优....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 15:29
•2836次阅读
代码解读 int main(int argc, char** argv){ ros::init(ar....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 15:18
•2120次阅读

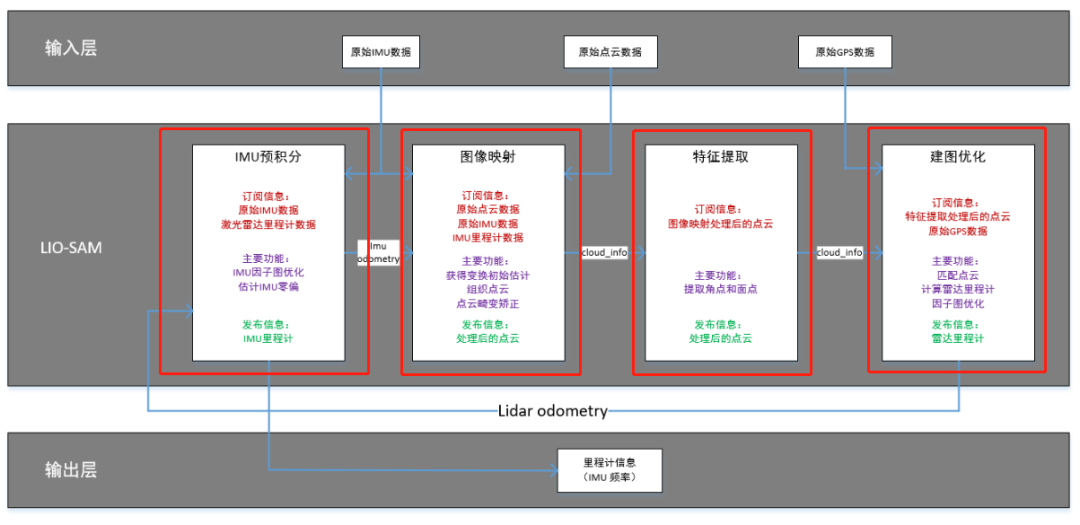
LIO-SAM的全称是:Tightly-coupled Lidar Inertial Odometr....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 15:04
•3297次阅读
支撑相足端轨迹 相比于摆动相的足端轨迹,支撑相的设计就显得稍微简单。首先我们要知道两点: 支撑相水平....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 11:48
•1222次阅读
1、摆动相轨迹设计 基于第二节中提到的原则,文献[1]中提出了一种基于复合摆线形式的轨迹规划方法,并....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 11:43
•1612次阅读
一、摆线 摆线,又称旋轮线、圆滚线,在数学中,摆线(Cycloid)被定义为,一个圆沿一条直线运动时....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-22 11:35
•1839次阅读
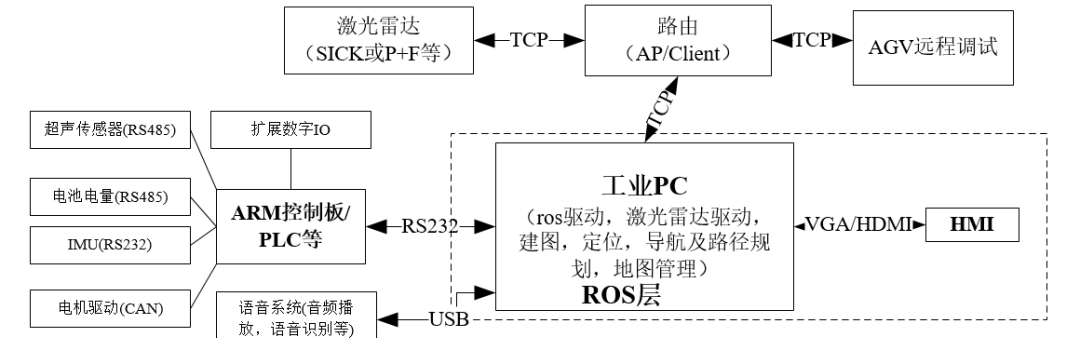
ROS的运用开发 一般来说市面上机器人的开发分两个主流,一个是移动机器人(AGV),主要运用场景是酒....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-21 18:17
•1929次阅读
ROS的扩展 ROS除了本身框架性的东西以外,最大的特色就是能融合很多其他的东西,形成一个机器人开发....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-21 18:12
•1377次阅读
ROS核心框架 对于第一个问题,我也没仔细研究过源码,核心代码基本由python和C++组成,运用了....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-21 18:07
•1998次阅读

ROS初探 刚开始入手ROS的时候确认有点麻烦,第一它运行在Ubuntu环境。 不过还是用Ubunt....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-21 17:55
•1278次阅读
非均匀体素采样 SamplingSurfaceNormal,将输入空间划分为网格,直到每个网格中最多....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-21 17:50
•1577次阅读
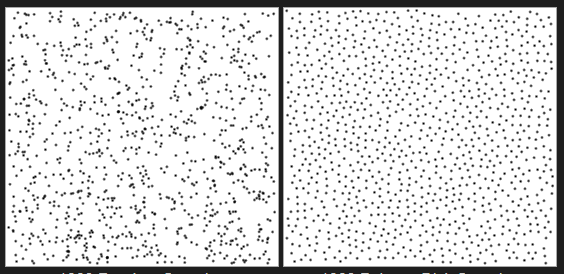
泊松盘采样 泊松盘采样(possion disk sampling)的特点是任何两个点的距离都不会隔....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-21 17:42
•2840次阅读
法线空间采样 NormalSpaceSampling即:法线空间采样,它在法向量空间内均匀随机抽样,....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-21 17:28
•2075次阅读
最远点采样(Farthest Point Sampling) 这里我们来单独看一下调用代码,这里可以....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-21 17:18
•2005次阅读
























