 如何创建机器人模型
如何创建机器人模型

完整机器人模型
所有的link和joint标签完成了对机器人每个部分的描述和组合,全都放在一个robot标签中,就形成了完整的机器人模型。
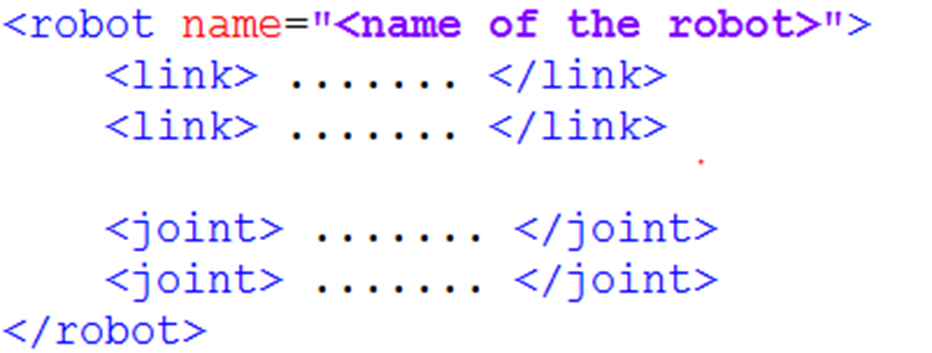
所以大家在看某一个URDF模型时,先不着急看每一块代码的细节,先来找link和joint,看下这个机器人是由哪些部分组成的,了解完全局之后,再看细节。
创建机器人模型
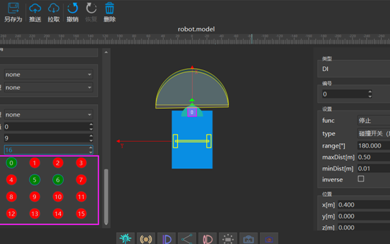
好啦,讲了这么多,还是要看一个完整的示例。
我们以这款移动机器人模型为例,一起看下它的URDF建模过程。
功能包结构
机器人的模型放置在learning_urdf功能包中,功能包中包含的文件夹如下:
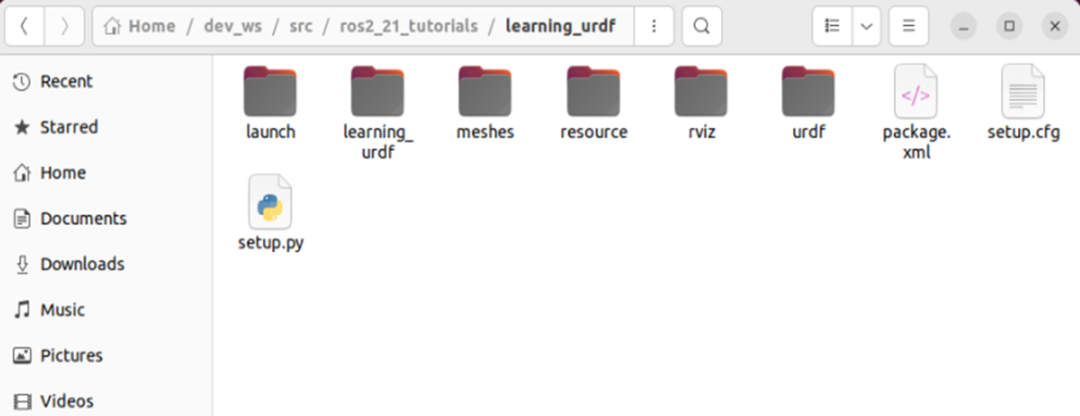
- urdf:存放机器人模型的URDF或xacro文件
- meshes:放置URDF中引用的模型渲染文件
- launch:保存相关启动文件
- rviz:保存rviz的配置文件
模型可视化效果
我们先来看下这个模型的效果,尝试逆向分下一下机器人的结构。
$ ros2 launch learning_urdf display.launch.py
很快就可以看到Rviz中显示的机器人模型啦,大家可以使用鼠标拖拽观察。
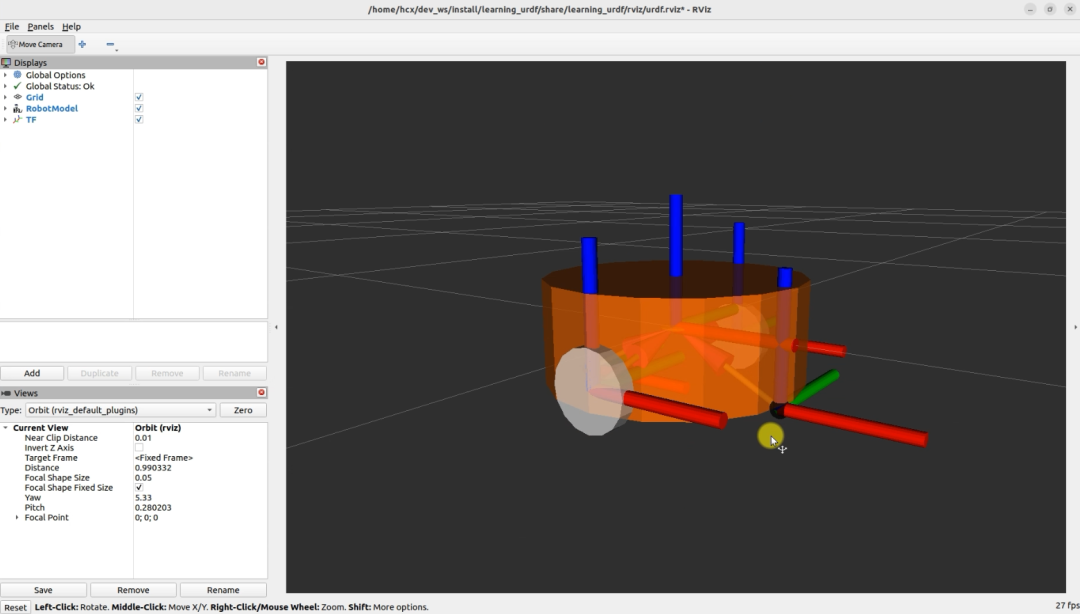
从可视化的效果来看,这个机器人由五个link和4个joint组成。
查看URDF模型结构
我们分析的对不对呢,可以在模型文件的路径下,使用urdf_to_graphviz这个小工具来分析下。
$ urdf_to_graphviz mbot_base.urdf # 在模型文件夹下运行
运行成功后会产生一个pdf文件,打开之后就可以看到URDF模型分析的结果啦,是不是和我们的猜测完全相同呢!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31700浏览量
224682 -
模型
+关注
关注
1文章
3882浏览量
52379 -
机器臂
+关注
关注
0文章
19浏览量
6538
发布评论请先 登录
相关推荐
热点推荐
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优
发表于 07-05 08:52
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
近年来,人工智能领域的大模型技术在多个方向上取得了突破性的进展,特别是在机器人控制领域展现出了巨大的潜力。在“具身智能机器人大模型”部分,作者研究并探讨了大
发表于 12-29 23:04
机器人餐厅
哈尔滨首开机器人餐厅 生意爆棚2013年1月12日,哈尔滨市中央大街上有一家机器人为主题的餐厅。据了解,这家机器人主题餐厅营业半年来,顾客盈门,很受食客的欢迎。餐厅有煮水饺机器人、煮面
发表于 07-26 09:11
机器人视觉——机器人的“眼睛”
目前产业机器人仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了机器人的应用。利用机器人的视觉控制,不需要预先对产业机器人的运动轨迹进行示教或离
发表于 01-23 15:02
nao机器人与其他机器人的区别
相比于之前的机器人,NAO机器人穿上人类的服装,那就像是一个真人出现在我们面前似得,NAO机器人的四肢设计的非常的灵活,具有多个自由度的身体,使得NAO机器人能够灵敏的行走以及参加一
发表于 02-13 15:43
【Aworks申请】家庭服务机器人
申请理由:以开发板为处理器,利用深度传感器Kinect,实现家庭服务机器人的 物体识别技术、人体识别技术、动态不确定环境下的自定位、地图创建与导航及人机交互与语音识别技术等基本功能,替代
发表于 07-19 23:33
工业机器人的工作原理
要知道机械臂各关节变量空间和末端操作器的位置和姿态之间的关系,这就是机器人运动学模型。一台机器人机械臂几何结构确定后,其运动学模型即可确定,这是机器
发表于 12-15 10:25
请问为什么用matlab仿真机器人末端轨迹,会出现“位置 1 的索引超出数组范围(不能超过 1)”的问题?
, L3, L4, L5, L6]); %创建机器人模型 robot.name='M-20iA'; %机器人模型名称 theta=[0 pi
发表于 01-09 11:25
什么是服务机器人
问:什么是服务机器人?答:根据国际机器人联合会(InternationalFederationofRobotics,IRF)的定义,服务机器人是一种半自主或全自主工作的机器人,它能帮助
发表于 09-17 07:49
将Simulink模型与Lego机器人结合使用
将Simulink模型与Lego机器人结合使用可提供令人愉悦的基于模型的设计体验支持LEGO MINDSTORMS NXT作为产品标准功能。即使没有ECRobot NXT,您也可以玩乐高游戏
发表于 12-20 07:15




评论