 机器人中都有哪些坐标系
机器人中都有哪些坐标系

坐标系是我们非常熟悉的一个概念,也是机器人学中的重要基础,在一个完整的机器人系统中,会存在很多坐标系,这些坐标系之间的位置关系该如何管理?
机器人中的坐标系
机器人中都有哪些坐标系呢?

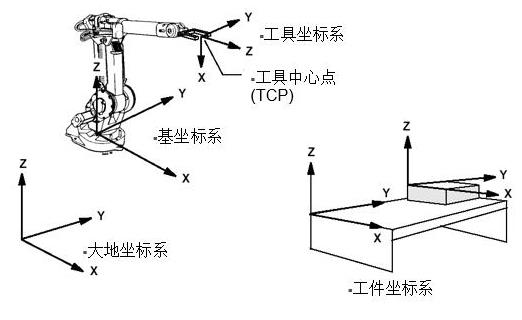
比如在机械臂形态的机器人中,机器人安装的位置叫做基坐标系Base Frame,机器人安装位置在外部环境下的参考系叫做世界坐标系World Frame,机器人末端夹爪的位置叫做工具坐标系,外部被操作物体的位置叫做工件坐标系,在机械臂抓取外部物体的过程中,这些坐标系之间的关系也在跟随变化。
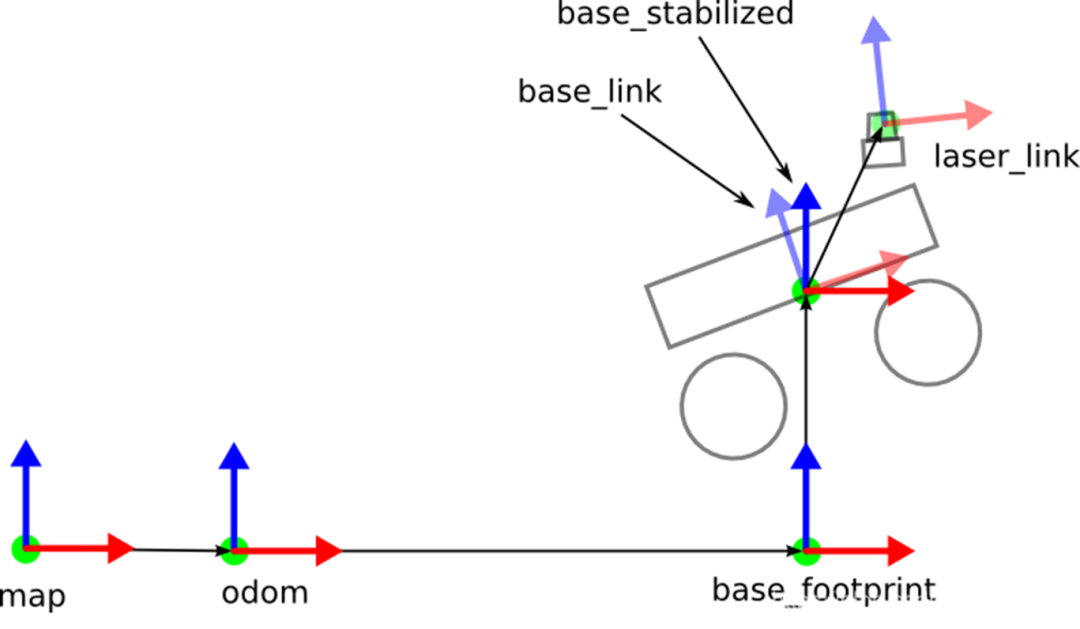
在移动机器人系统中,坐标系一样至关重要,比如一个移动机器人的中心点是基坐标系Base Link,雷达所在的位置叫做雷达坐标系laser
link,机器人要移动,里程计会累积位置。
这个位置的参考系叫做里程计坐标系odom,里程计又会有累积误差和漂移,绝对位置的参考系叫做地图坐标系map。
一层一层坐标系之间关系复杂,有一些是相对固定的,也有一些是不断变化的,看似简单的坐标系也在空间范围内变得复杂,良好的坐标系管理系统就显得格外重要。
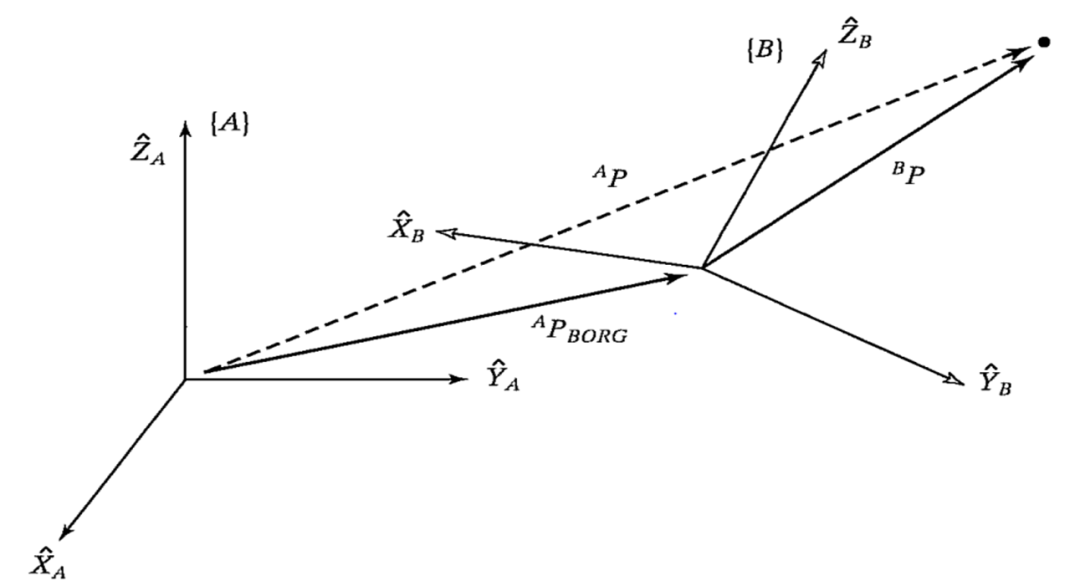
关于坐标系变换关系的基本理论,在每一本机器人学的教材中都会有讲解,可以分解为平移和旋转两个部分,通过一个四乘四的矩阵进行描述,在空间中画出坐标系,那两者之间的变换关系,其实就是向量的数学描述。
ROS中TF功能的底层原理,就是对这些数学变换进行了封装。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31520浏览量
223920 -
坐标系
+关注
关注
0文章
29浏览量
7629 -
移动机器人
+关注
关注
2文章
820浏览量
34947 -
ROS
+关注
关注
1文章
296浏览量
18888
发布评论请先 登录
相关推荐
热点推荐
abb机器人工具坐标系问题
各位大佬请教一下,abb机器人工具坐标系用四点法,六点法,手动输入等方式标定出的工具坐标系的Z方向与实际工具的长度不符,实际工具长度越长坐标系z方向的差距越大。比如实际工具400mm
发表于 08-07 11:11
介绍坐标系和机器人之间的纽带即连杆坐标系
介绍坐标系以及它们之间的变换关系,数学的意味还是很浓的。讲了那么多的公式和规律,它们要怎么用在机器人上呢?这篇文章将介绍坐标系和机器人之间的纽带即连杆
发表于 09-01 06:17
几大坐标系决定工业机器人精确性
坐标系包含:
1、基坐标系(Base Coordinate System)
2、大地坐标系(World Coordinate System)
3、工具坐标系(Tool Coord
发表于 04-02 11:31
•2589次阅读
机器人基坐标系标定方法研究
针对借助激光跟踪仪标定机器人所涉及的坐标系统一问题,对基于空间几何法拟合建立的基坐标系与机器人理论基坐标系的转换关系进行了研究,提出了一种基
发表于 03-07 10:43
•2次下载
机器人4大坐标系讲解
任何机器人都离不开基坐标系,也是机器人TCP在三维空间运动空间所必须的基本坐标系(面对机器人前后:X轴 ,左右:Y轴, 上下:Z轴)。
机器人坐标系用法和算法原理
一般都会定义机器人第一轴的旋转轴为基坐标系Z轴,旋转中心即是坐标系原点,X和Y的方向是的电机零点确定,所以只要你不更换电机的零点和机械结构,单个机器人里这个基
发表于 05-11 15:57
•2838次阅读

机器人坐标系选择指令和操作步骤
在编程操作过程中,为了确定机器人的空间位置以及姿态的变化,需要建立合适的工具和用户坐标系。工具坐标系用于确定每个工具中心点(TCP)的位置和工具姿势。
发表于 05-12 14:43
•3533次阅读

世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系
相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机的成像过程,以及四个



三坐标测量机的机器坐标系和原点介绍
建立的,通常采用笛卡尔直角坐标系,由相互垂直的X、Y、Z三个坐标轴组成。(2)特点-唯一性:每台三坐标测量机都有且仅有一个确定的机器




评论