这里简单利用一个线性函数进行演示 取a=1,b=1,其图像随时间变化如下: 利用周期函数对时间进行调....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 17:24
•1034次阅读
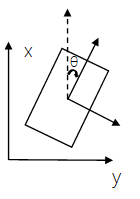
0、步态规划 四足机器人控制当中,步态是至关重要的一项。我们可以简单理解成四足机器人运动过程中各腿的....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 17:17
•1827次阅读

1.通信协议 控制指令格式(15字节) 2.ROS端 在ROS端,首先需要接收从其他节点的控制消息,....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 17:10
•1516次阅读

STM32端返回的x轴线速度、y轴线速度是相对于自身的机体坐标系的速度,而机器人的位置信息是相对于世....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 16:58
•987次阅读
1.通信协议 里程计数据格式(19字节) 2.STM32端 /** * @brief 发送里程计数据....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 16:48
•1313次阅读

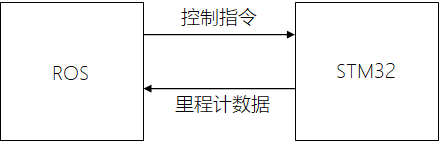
ROS与STM32的通信流程如图所示 主要包含两个方面: 小车里程计数据的上传与接收 控制指令的下发....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 16:36
•1276次阅读
驱动器有哪些? 2.1 有刷电机驱动器 直流有刷电机的驱动方法其实本质上是使用 H 桥电路进行驱动,....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 16:28
•3043次阅读
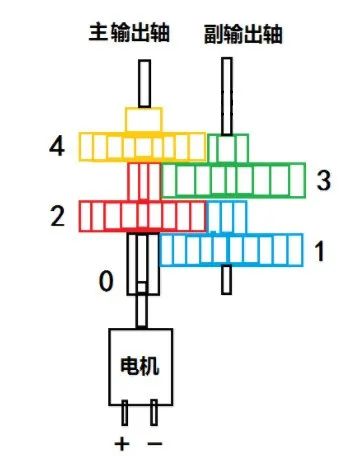
舵机 舵机是一种“特殊”的直流电机,其构造不仅只有电机部分,而且还自带一个控制器,所以舵机本身就是一....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 16:17
•5610次阅读
伺服电机 “伺服”一词是来源于希腊语“奴隶”的意思,那么伺服电机也可以理解为绝对服从控制信号指挥电机....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 16:13
•2129次阅读
步进电机 步进电机是一种将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 16:08
•2311次阅读
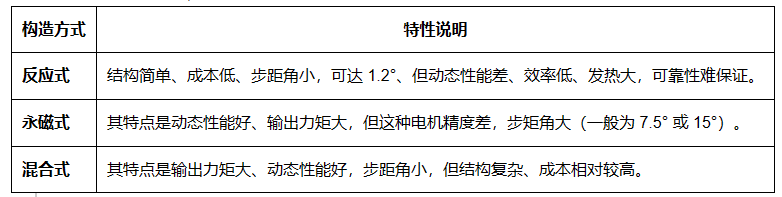
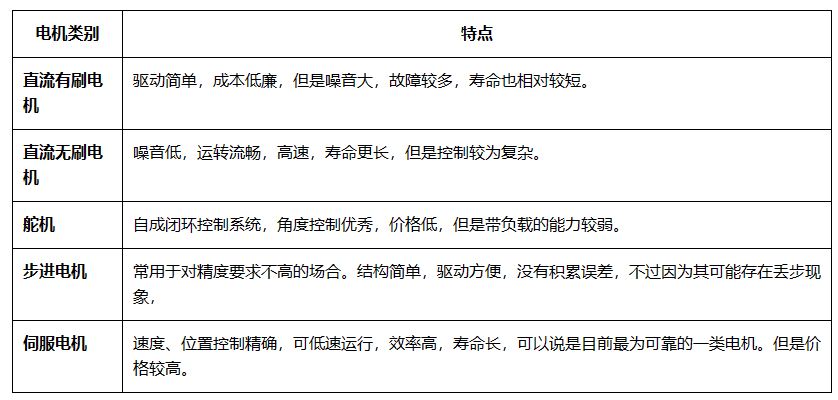
直流电机 在直流电机中还分为普通的直流电机、直流减速电机,有刷和无刷,共分为: 直流有刷电机 直流有....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 16:01
•5746次阅读
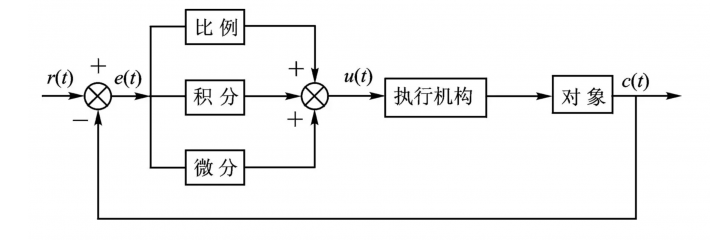
我们在学习和使用PID的时候,可能会有很多电机的选择。然而不同的电机使用的PID参数是不太一样的。所....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 15:56
•3920次阅读
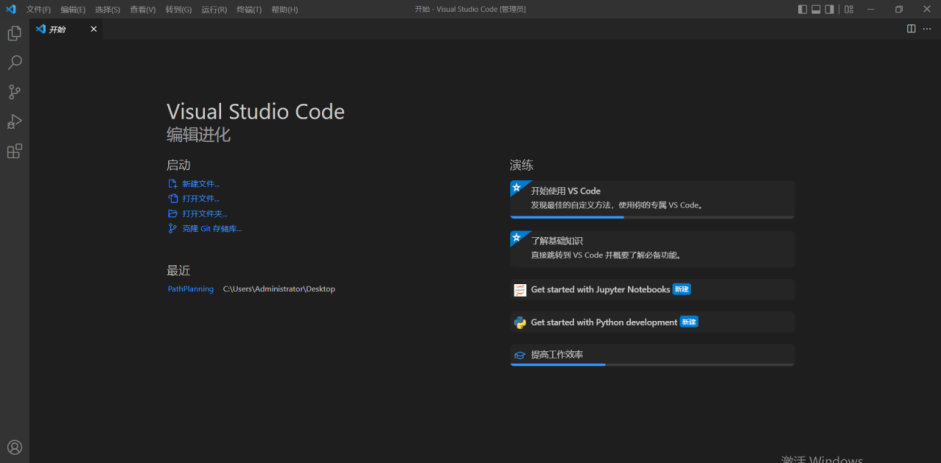
这里我们使用Anacondda的Python编程环境,使用Visual Studio Code软件进....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 15:52
•1293次阅读
路径规划算法主要可分成两种,一种是基于搜索结果的规划,另一类便是本文中将要提及的基于采样的规划。 一....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 15:45
•1316次阅读
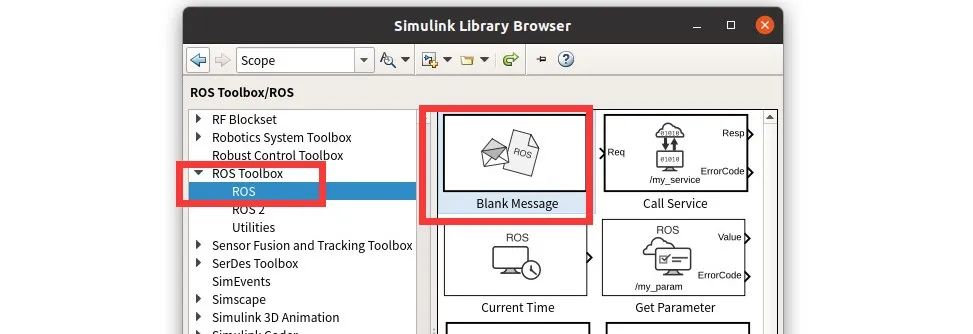
创建一个空白ROS消息,并用机器人路径的X和Y位置填充它。然后将更新后的ROS消息发布到ROS网络。....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 18:18
•1775次阅读
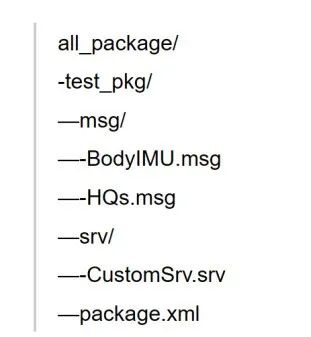
自定义Message 当我们的 message 消息比较复杂时,通常要用到自定义的 message ....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 18:12
•2779次阅读
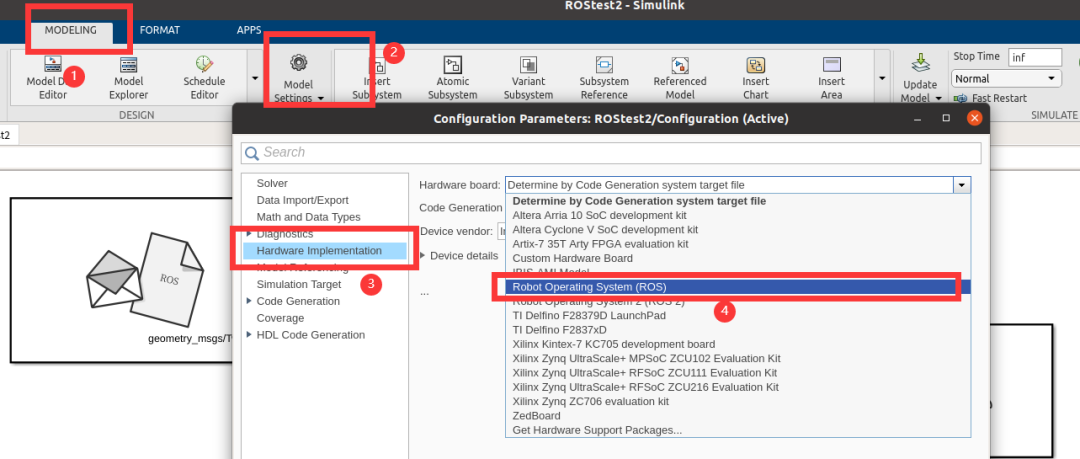
当我们用simulink完成控制程序的搭建后,我们期望下一次可以直接对ROS进行控制,而不是每次都需....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 17:53
•1820次阅读
创建一个Publisher 配置一个block,并向/location的节点发送一条geometry....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 17:32
•1444次阅读
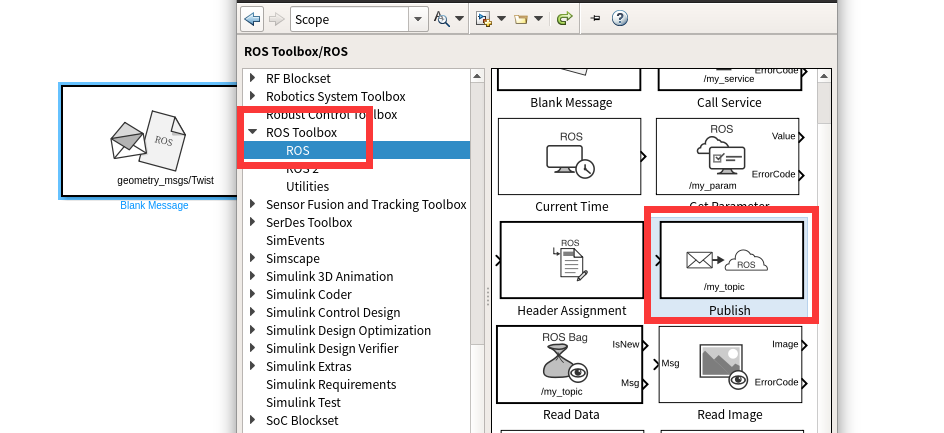
Simulink对机器人操作系统(ROS)的支持使我们能够创建与ROS网络一起工作的Simulink....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 17:26
•1296次阅读
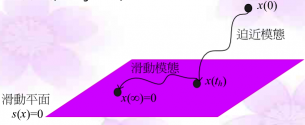
滑模控制目的 对于滑模控制而言,我觉得我们先要明白其目的再来学习。 一开始我们对滑动控制的定义是:滑....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 17:15
•6565次阅读
无模型的 PID 横向控制算法参数少,简单易用,但是由于没有考虑车辆系统动力学特性及路径本身的动态变....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 17:02
•2109次阅读
基于前面推导的路径跟踪偏差系统状态方程(3-20),就可以分析在前轮转角控制输入
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 16:54
•1700次阅读

基于车辆运动学模型的方法忽略了车辆的动力学特性,因此在 车速过快 或者 曲率变化率过大 的情况下该算....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 16:47
•2104次阅读

后轮反馈控制算法 后轮反馈式(Rear wheel feedback)是利用 后轮中心 的 路径跟踪....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 16:26
•2071次阅读
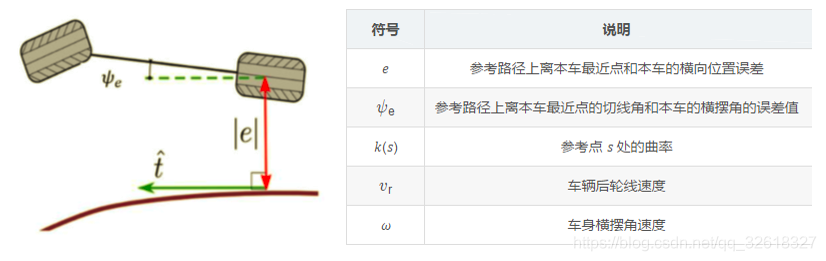
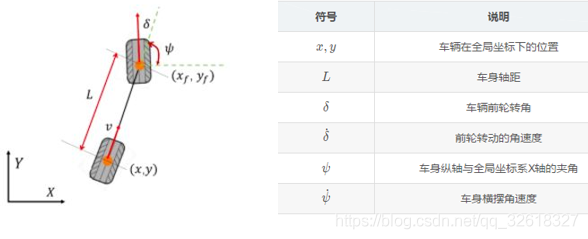
车辆运动学模型 基于车辆运动学模型的控制方法主要考虑了车辆的运动学约束对车辆控制的影响。 平时见到的....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 16:16
•1431次阅读
1.1 无人驾驶车辆 大到类似百度apollo无人车,无人配送车,小到扫地机器人,其实都是无人驾驶车....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 16:00
•1887次阅读
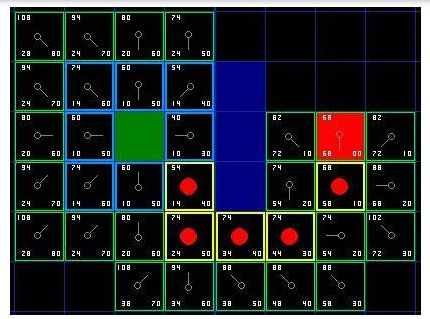
图像信息 MATLAB提供了对图像消息的支持,其消息类型始终为sensor_msgs/Image。 ....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 15:50
•843次阅读
Message中的队列 在ROS中有一些复杂的消息中可以包含其他的消息,并形成消息数组。 例如在ex....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 15:39
•1353次阅读
** Message数据转化** 由于在Matlab中,ROS消息的每个元素是独立的,因此无法验证具....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 15:24
•1314次阅读

保存和加载消息 您可以保存消息并存储内容以供以后使用。 例如从订阅者获取一条新消息。 posedat....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 15:17
•1042次阅读



























