 机器人支撑相足端轨迹
机器人支撑相足端轨迹

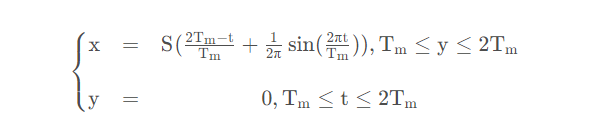
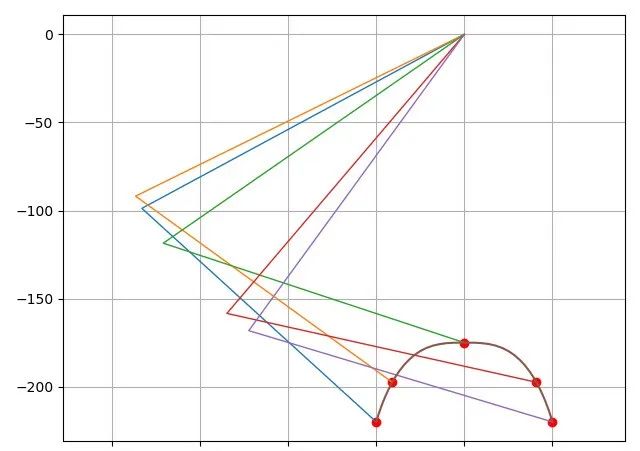
支撑相足端轨迹
相比于摆动相的足端轨迹,支撑相的设计就显得稍微简单。首先我们要知道两点:
支撑相水平方向上的位移曲线与摆动相的关于t = T m 对称。
竖直方向的位移适终为0,基于这两点,我们可以设计出如下曲线:
周期轨迹
定义步态周期为T TT,支撑相,摆动相周期均为T m ,则T = 2 T m
我们对时间进行周期化处理:
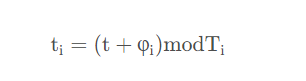
其中,t 为系统时间,t i为第i条腿的轨迹规划时间,以LF腿的相位为初始值,则φ i为各腿相位落后于LF腿的时间与步态周期的比值。

四、总结
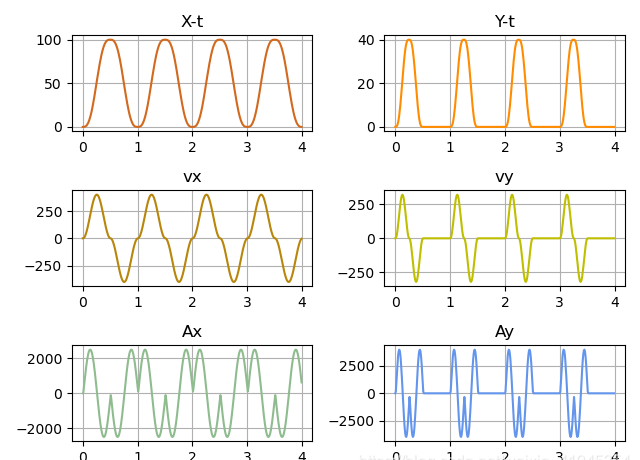
通过对轨迹方程的改进及其图像的分析,我们最终得到了一个平滑,且冲击较小的复合摆线轨迹
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
215文章
31796浏览量
224975 -
轨迹
+关注
关注
0文章
46浏览量
9631
发布评论请先 登录
相关推荐
热点推荐
stm32红外六足机器人
六足爬行机器人毕业时的作品,当时还处于入门状态,c程序写的比较菜(程序写的比较乱,仅作参考),一直想把这个六足机器人作品优化一下,可惜,一直在忙,现借助电路城这个平台开源给大家,希望大
发表于 03-27 18:51
【Embedded Pi申请】六足机器人的创新研发
申请理由:关于六足机器人,基本上是用18个舵机一起使用来驱动六足完成相应的动作组,而一般的89C52以及STC12系列的单片机只能让六足机器人
发表于 11-25 15:35
什么是龙人四足机器人?
龙人四足机器人是一种仿生机器人,由Openduino控制板控制,有四条腿,每条腿两个自由度,由两个舵机驱动,能实现两种步态行走。配有三个超声波,实现大角度智能避障。标准演示程序有5个可
发表于 03-24 16:17
ColorSky双足机器人开源项目
本帖最后由 colorsky 于 2016-4-21 14:05 编辑
大家好,我是ColorSky。这是我的双足机器人的开源项目。先发出视频给大家看看,后面陆续会把技术资料上传。机器人鞠躬动作
发表于 04-21 10:51
四足仿生机器人
本帖最后由 红尘。破 于 2016-8-19 14:59 编辑
今天整理资料时发现了一年前做的四足仿生机器人,当时买了一个四足仿生机器人的骨架,画了个板子,写了个测试代码,能完成
发表于 08-19 14:59
【NUCLEO-F412ZG申请】六足仿生机器人
,大部分六足机器人采用了仿昆虫的结构,6条腿分布在身体的两侧,身体左侧的前、后足及右侧的中足为一组,右侧的前、后足和左侧的中足为另一组,分别组成两个三角形支架,依靠大腿前后划动实现
发表于 11-14 18:54
浅谈差速机器人的纯轨迹跟踪仿真
差速机器人的纯轨迹跟踪仿真(Matlab)刚入门,有的地方不对,烦请大家指正。目录差速机器人的纯轨迹跟踪仿真(Matlab)1 差速机器人运
发表于 09-01 08:11
四足机器人的机构设计
四足机器人属于复杂机电系统,需要综合生物、机械、电子、控制等学科内容,具体涉及仿生机构设计、灵巧运动机构设计、高性能驱动器制造,行走稳定性控制、强化学习等在内的多个研究方向。其中,机构设计是保障四足
发表于 09-15 06:54



评论