设置消息信息 ROS 消息是结构。可以直接复制它们以生成新的消息。副本和原始消息都有自己的数据。创建....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 14:55
•1257次阅读
消息结构获取 ROS消息是对象,消息数据存储在属性中。MATLAB具有方便的方法来查找和探索消息的内....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 14:40
•1004次阅读
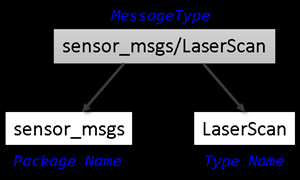
消息是ROS中交换数据的主要容器。主题和服务使用消息在节点之间传输数据。为了标识其数据结构,每条消息....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 14:36
•1004次阅读
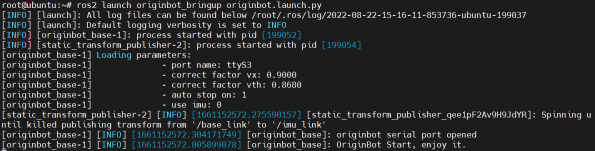
运行案例 启动底盘和雷达 SSH连接OriginBot成功后,在终端中输入如下指令,启动机器人底盘和....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 14:29
•1891次阅读
元素的操作方式 send_keys() 解释:用于向输入框等可输入元素中发送文本内容 用法: ele....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 11:44
•1205次阅读
开始使用 1.打开浏览器定位页面 准备工作都完成后,接下来是打开浏览器了,这里我们以百度为例。 # ....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 11:40
•894次阅读
定义 Selenium是一个用于Web应用程序测试的自动化测试工具。使用Selenium可以驱动浏览....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-15 11:12
•1033次阅读

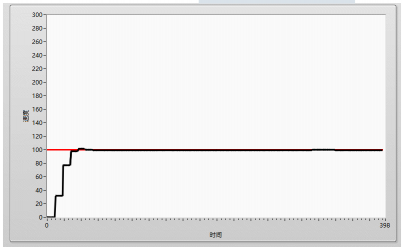
实际调参 从实际的 PID 系统曲线来理解 PID 各个系数的调节效果。 ① 先调整比例系数,积分、....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 17:40
•3273次阅读
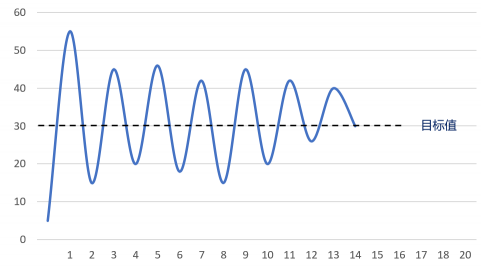
临界比例法 内容 在闭环的控制系统里,将调节器置于纯比例作用下,从小到大逐渐调节比例系数,直到系统曲....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 17:34
•4747次阅读
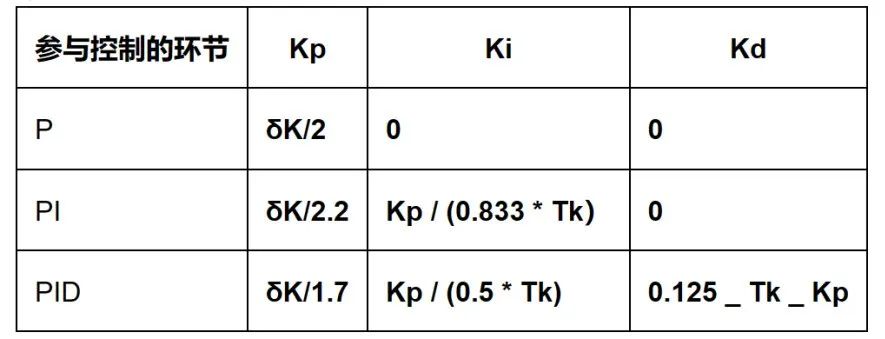
PID 参数整定方法 理论计算整定法:依据系统的数学模型,经过理论计算确定 PID 参数。 这种方法....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 17:21
•3934次阅读
在学习 PID 算法的参数整定的时候,每一个系统的 PID系数是不通用的,在不同的系统中运用同样的 ....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 17:12
•6045次阅读
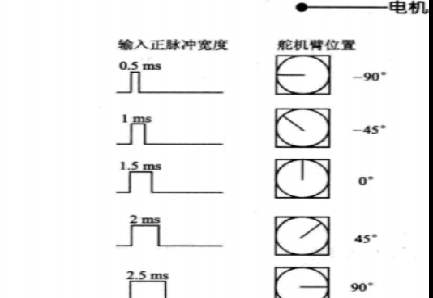
舵机中值及限幅 S3010舵机位于理论中值时一个周期的高电平时间应该为1.52ms由此可得占空比为7....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 17:05
•2503次阅读
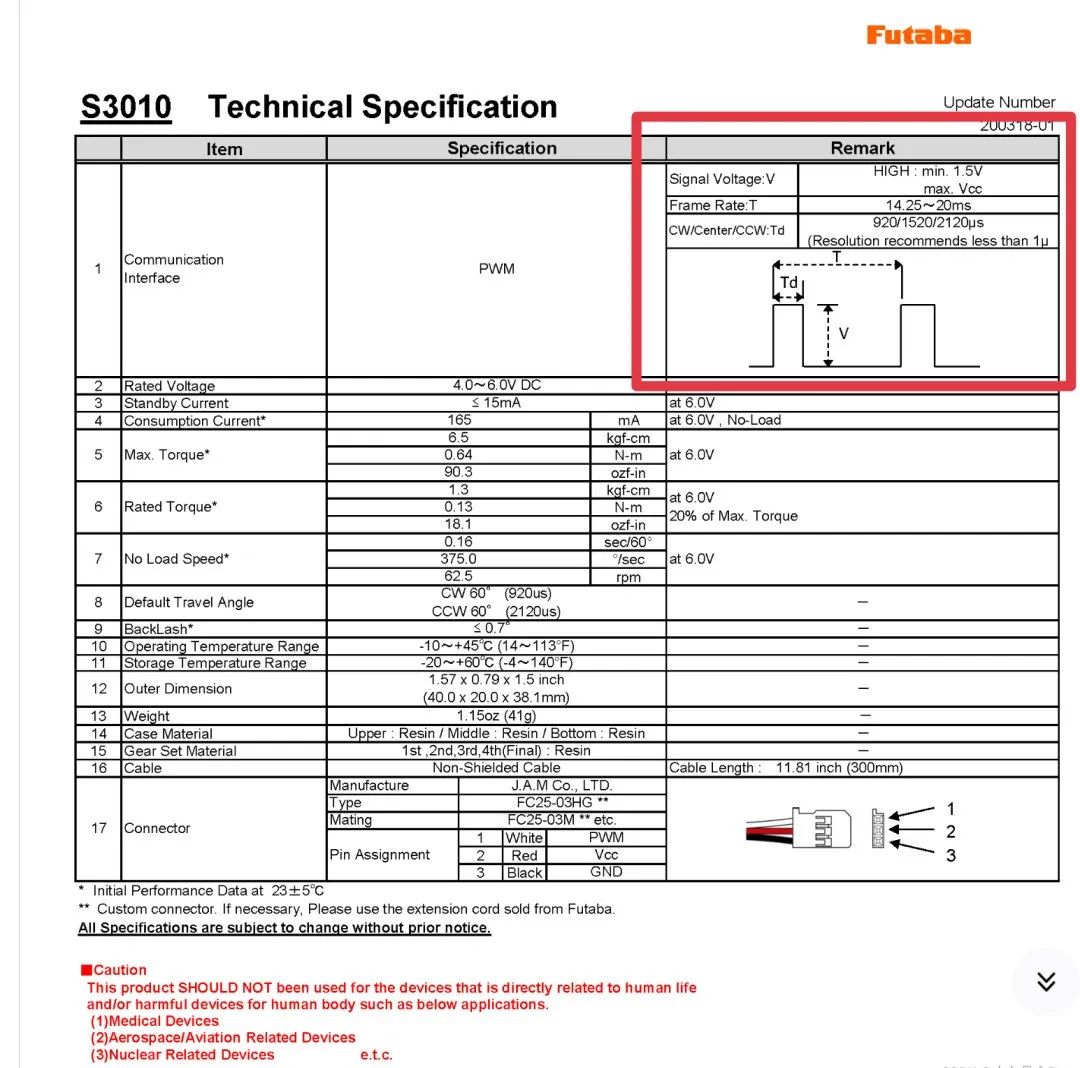
舵机 舵机是一种位置(角度)伺服的驱动器,我们可以通过给信号脚不同的占空比来让舵机进行打角进而控制小....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 16:54
•2045次阅读
控制环节与控制量 整个系统的控制器就是偏差处理函数,方向环多为离散的PD控制器(PD控制器会在后面P....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 16:47
•970次阅读
方向控制 典型环节对应 由于车模结构的不同,小车方向控制的各环节会有所区别,例如L车、B车的执行结构....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 16:40
•1082次阅读

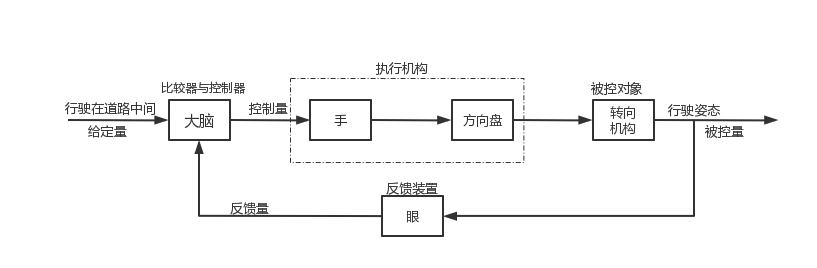
自动控制理论 为了更好地理解“控制”,我们复习一下自动控制原理的相关理论知识。 人工控制系统 首先,....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 16:32
•2830次阅读
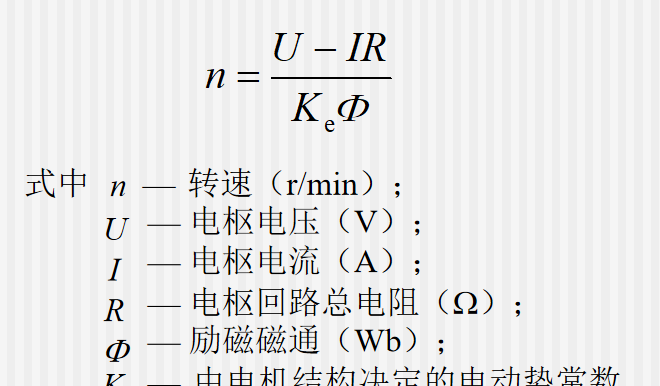
直流电动机的稳态转速方程可以表示为: 根据上式,从数学的角度可以得知,直流电机有三种调节转速的方法:....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 16:23
•1607次阅读
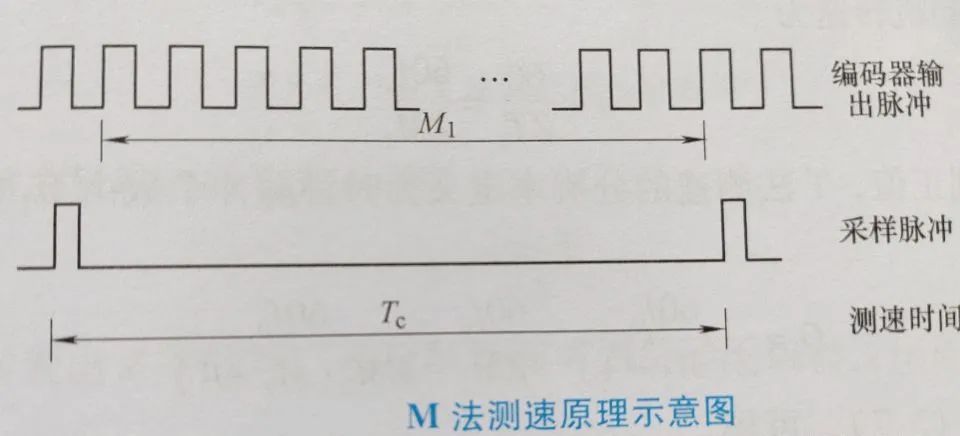
反馈环节 此处的反馈环节是使用的增量式旋转编码器(常见旋转编码器分为绝对式和增量式感兴趣的小伙伴自己....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 16:04
•1797次阅读
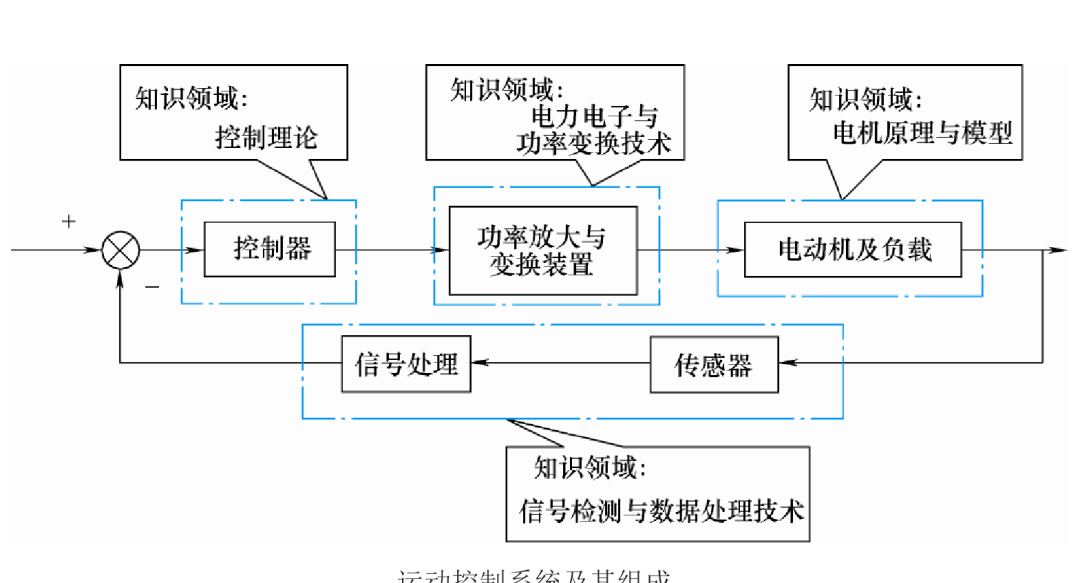
运动控制系统是通过控制电机电压、电流、频率等输入量,来满足工作机械的转矩、速度、位移等机械量,使各种....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 15:54
•2875次阅读
阻抗控制性能提升后对稳定性有怎样的影响?如何权衡阻抗控制性能与稳定性的关系? 当阻抗控制性能提升时,....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 15:26
•2697次阅读
阻抗控制存在哪些科学问题?限制阻抗控制性能优化的因素是什么? 环境建模问题:阻抗控制需要对环境进行建....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 15:14
•1143次阅读
力控通常分为哪些? 力限制控制(Force-Limited Control):控制机器人末端执行器的....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 14:47
•2886次阅读
(1)什么是力控机器人? 力控机器人(force-controlled robot)是指一类具有力控....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 14:43
•2441次阅读
1. Ramer-Douglas-Peucker Ramer-Douglas-Peucker,又称拉....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 14:28
•905次阅读
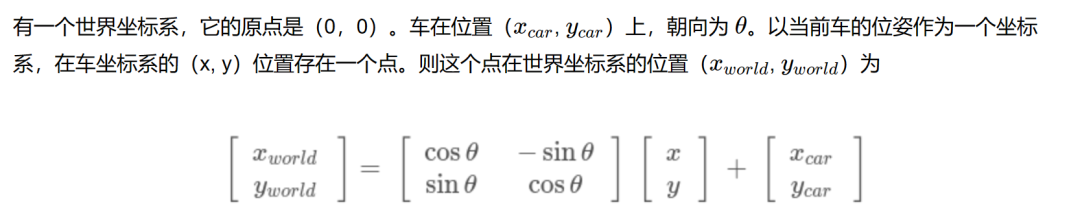
自动驾驶的关键挑战之一是准确感知和解释车辆周围环境的能力。这需要使用各种传感器,如相机、激光雷达和雷....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 11:49
•1666次阅读
BEV感知的二维特征点 首先来简单介绍一下什么是BEV感知。 BEV感知(Bird’s Eye Vi....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 11:37
•1471次阅读
空函数 如果想定义一个什么事也不做的空函数,可以用pass语句 def nop (): pass p....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 11:33
•1347次阅读
一、Python3 函数 函数是组织好的,可重复使用的,用来实现单一,或相关联功能的代码段。 函数能....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 11:26
•1653次阅读
形参的分类 形参的分类可以分为六种: 带有默认值的位置形参 不带默认值的位置形参 带有默认值的关键字....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 11:19
•1707次阅读
一、函数参数的分类 函数的参数分为两类:形参 及 实参 形参:形参是在创建过程中声明的参数,如果不给....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 11:13
•3797次阅读




















