一个cmd_tbl_t结构体变量包含了调用一条命令的所需要的信息。 • 对于环境变量bootcmd,....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-04 17:37
•1573次阅读

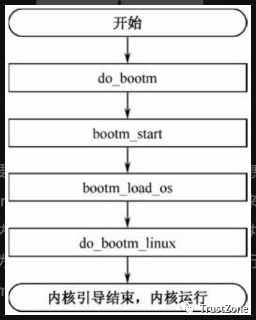
Bootm命令用来从memory启动内核,bootm命令的执行流程如下图所示。 在串口终端输入boo....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-04 17:33
•2256次阅读
U-boot是通过执行u-boot提供的命令来加载Linux内核的,其中 命令bootm的功能 即为....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-04 17:31
•1703次阅读
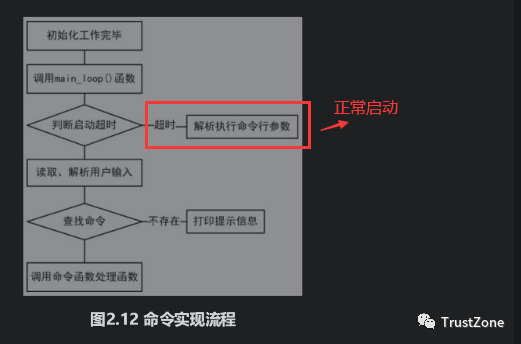
命令处理 main.c中的代码实现了将一个命令的所有参数分离存放在argv数组中,参数的数目为arg....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-04 17:23
•1280次阅读
1.启动延时 如果配置了启动延迟功能,U-Boot等待用户从控制台(一般为串口)输入字符,等待的时间....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-04 17:16
•3180次阅读
zImage内核镜像下载到开发板之后,可以使用u-boot的go命令进行直接跳转,这个时候内核直接解....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-04 17:09
•1107次阅读
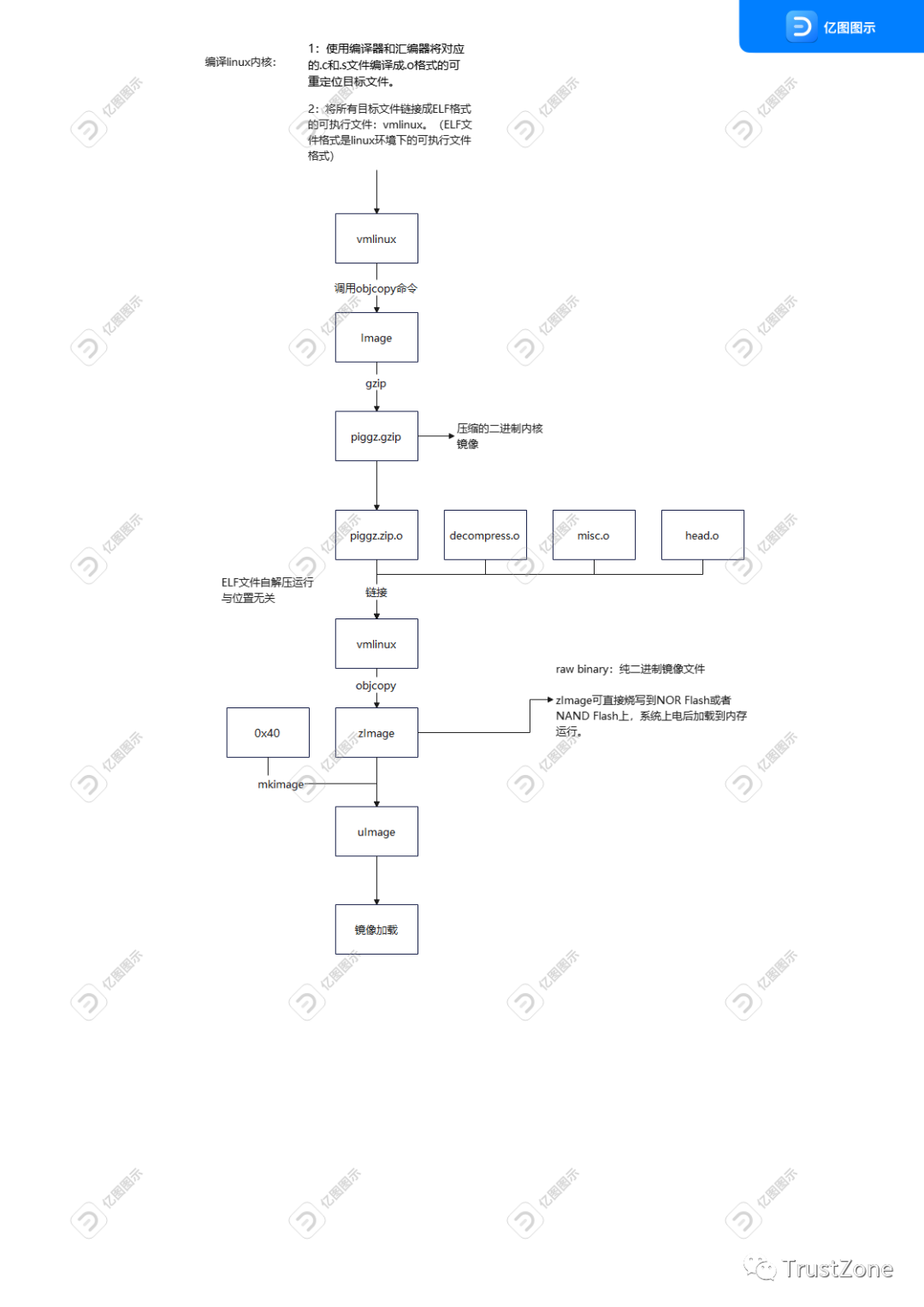
首先我们知道kernel的镜像最开始是压缩的zImage格式的存在,然后Uboot有工具mkimag....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-04 17:02
•1093次阅读
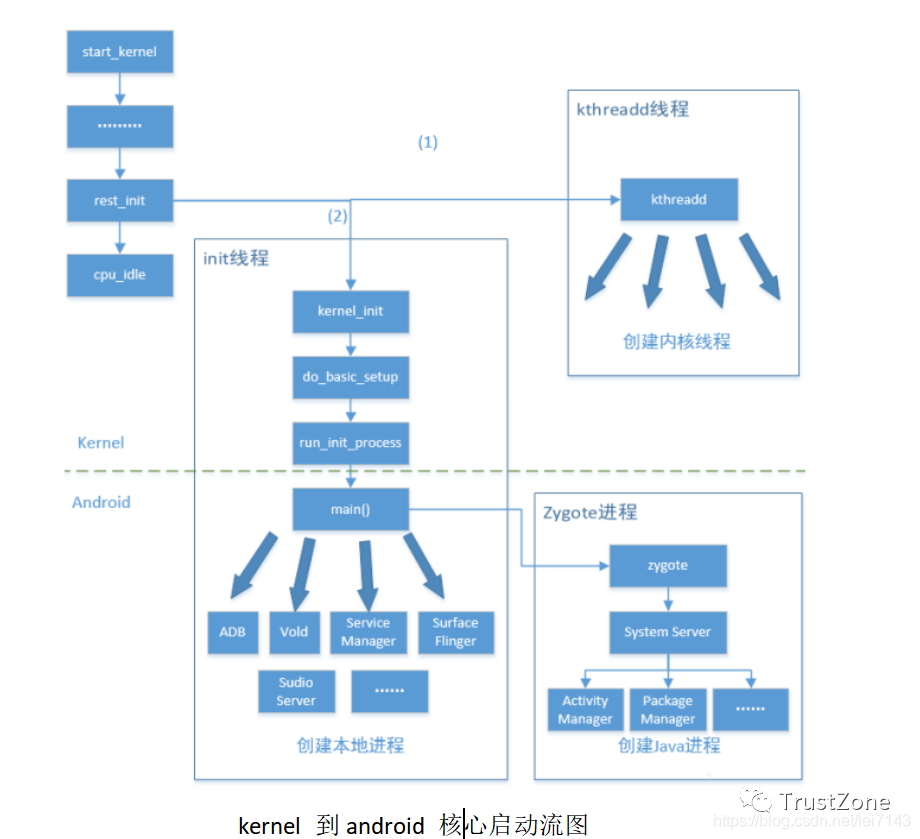
总结一个图:kernel 到android核心启动过程 kernel镜像执行跳转到start_ker....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-04 16:59
•2281次阅读
kernel的启动主要分为两个阶段。 1、阶段一 从入口跳转到start_kernel之前的阶段。 ....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-04 16:45
•1545次阅读
相比手机、电脑等通用平台,机器人的类型可是千变万化,构建机器人操作系统的难度就远比手机和电脑的操作系....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-01 17:20
•1174次阅读
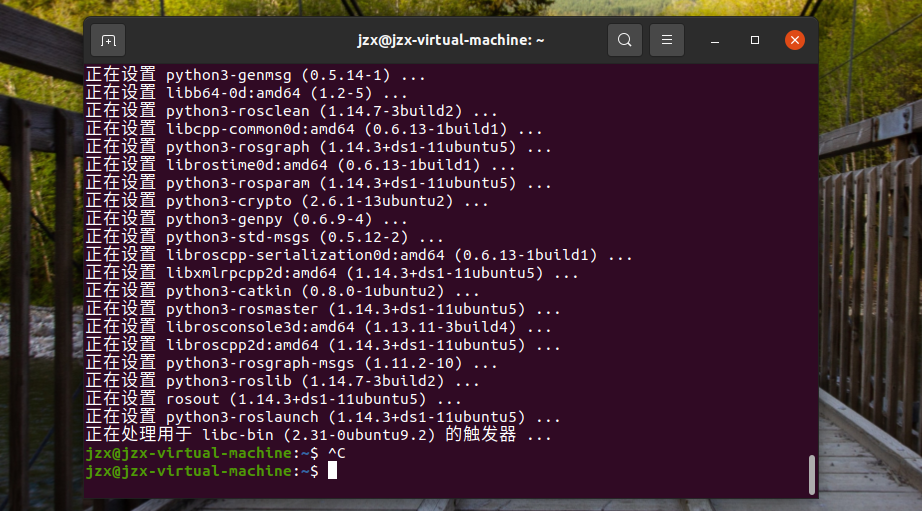
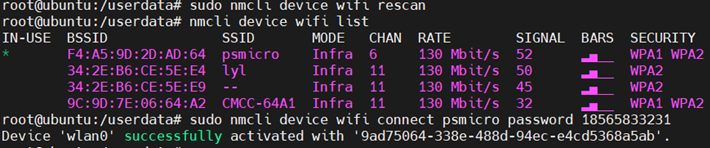
验证ROS是否安装成功 按正常来说ROS到这里就安装完成了,现在我们来验证一下,输入以下命令: ro....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-01 16:51
•10649次阅读
设置环境变量 输入下面的这行代码,注意到底是melodic还是noetic或者是kinetic是由你....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-01 16:34
•2737次阅读
初始化rosdep 输入以下的命令,先对其初始化一下 sudo rosdep init 如果出现以下....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-01 16:22
•2708次阅读

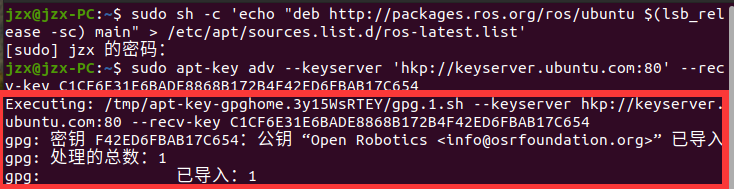
1.添加ROS软件源 将下面这条命令复制到ubuntu的终端执行 sudo sh -c '. /et....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-01 16:14
•3612次阅读
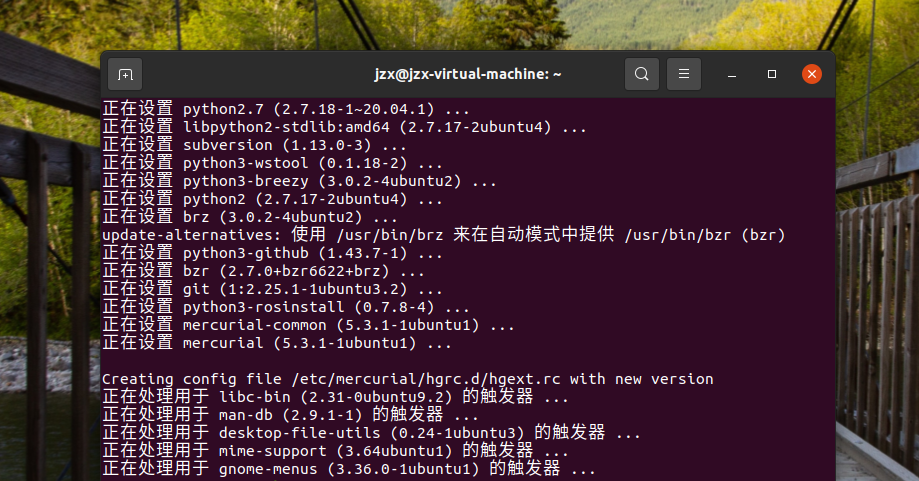
安装ROS2功能包 接下来,还有一个很重要的配置,那就是安装ROS2功能包,我们说TogetherR....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-01 16:02
•2790次阅读

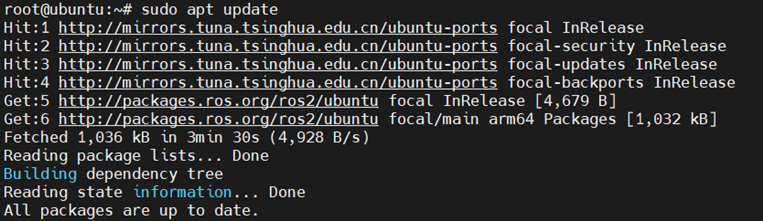
系统更新 第二个配置,是更新当前旭日X3派所使用的Ubuntu镜像,和在电脑上使用的命令相同。 我们....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-01 15:44
•1840次阅读
无论是旭日X3派,还是TogetherROS,在正式使用之前,都还需要进行一些必要的配置,完善必要的....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-01 15:39
•1193次阅读
话题接口的定义与使用 话题通信接口的定义也是类似的,继续从之前的机器视觉案例中来衍生,我们想把服务换....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-01 15:32
•2297次阅读

了解了通信接口的概念,接下来我们再从代码实现的角度,研究下如何定义以及使用一个接口。 在之前服务概念....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-01 15:28
•1332次阅读

ROS通信接口 接口可以让程序之间的依赖降低,便于我们使用别人的代码,也方便别人使用我们的代码,这就....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-01 15:03
•2001次阅读
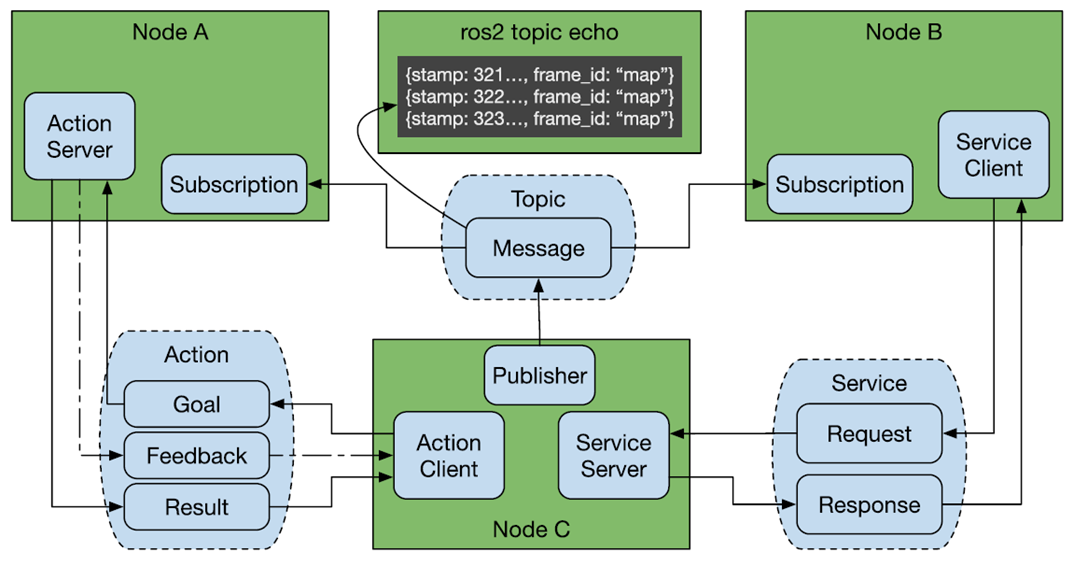
通信接口 在ROS系统中,无论话题还是服务,或者我们后续将要学习的动作,都会用到一个重要的概念——通....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 12-01 14:59
•1935次阅读
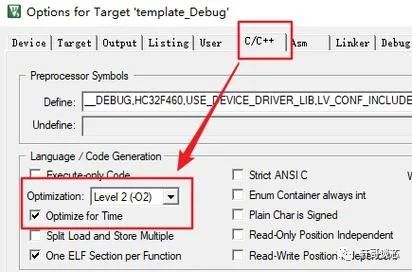
应对分支预测有哪些优化措施 下面再来看一下分支预测,这也是 ChatGPT 给出的一个简易答案 //....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-29 17:32
•1223次阅读
什么是分支预测 在超标量的流水线架构上,我们得知,CPU 在运行指令的时候,会在一个时钟上做多个操作....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-29 17:22
•1905次阅读
我们拿一个算法的代码实现来举例子,首先我们写一个求阶乘的子函数,这里我偷懒让 ChatGPT 帮忙生....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-29 17:15
•1015次阅读
一、H7 的特点 首先看看 M7 内核的 GD32H7都具备哪些不一样的功能,以下只是我个人关注的点....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-29 16:52
•1849次阅读

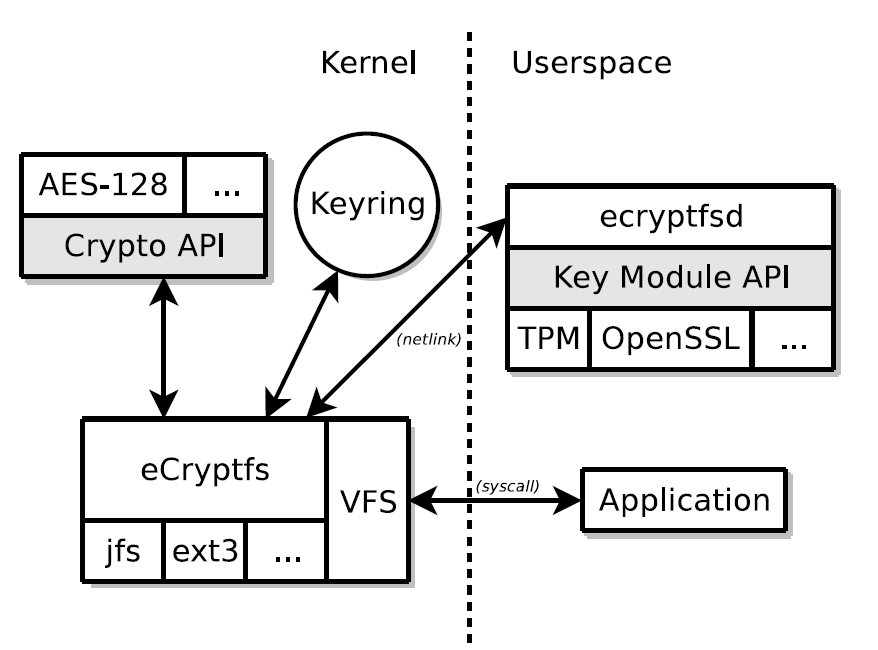
密钥管理 从上节中我们了解到eCryptfs中核心机制中主要有两个KEY,即FEKEK和FEK,前者....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-29 11:46
•1592次阅读

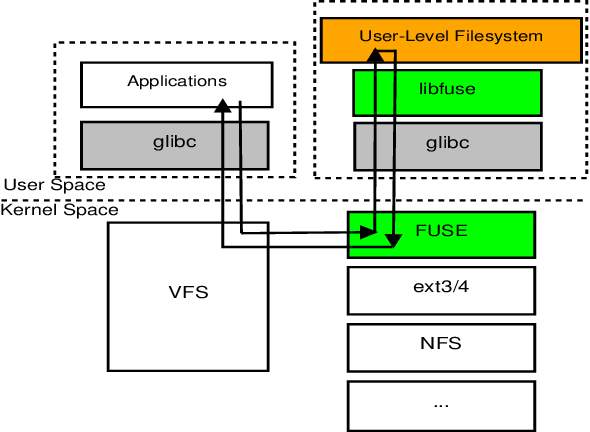
整体架构 eCryptfs整体架构如下图,主要是内核模块eCryptfs以及用户态进程ecryptf....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-29 11:43
•2160次阅读
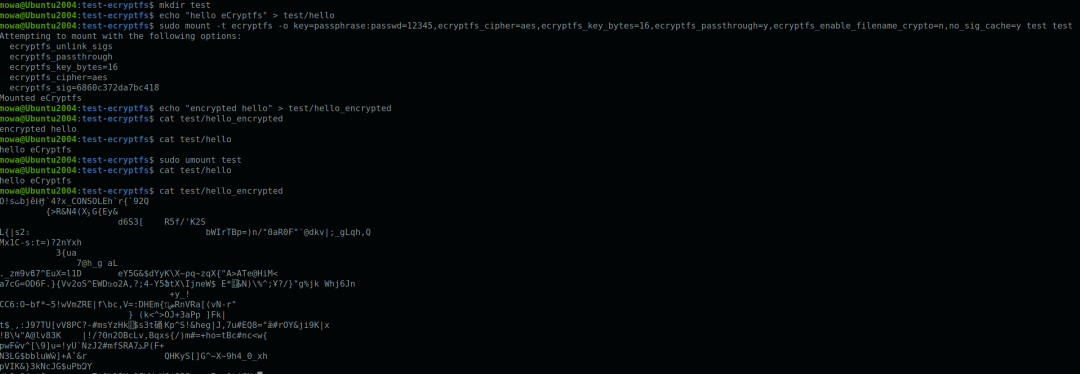
eCryptfs详解 本章节我们先用简单用例验证eCryptfs加密效果特点,使大家对方案有个整体感....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-29 11:27
•2569次阅读
Linux系统FBE 从Linux系统软件架构看,典型FDE和FBE实现方案分布如下图,包括基于dm....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-29 11:23
•2621次阅读
File-Based Encryption,又称Filesystem-Level Encryptio....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-29 11:08
•8569次阅读


























