有参数重试 (1) stop_max_attempt_number 在retry中传入stop_ma....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 11:08
•1694次阅读
在编程的时候,我们难免会遇到一些不可靠的情况,比如网络请求失败,数据库连接超时等等。这些不确定性会让....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-14 11:01
•1158次阅读
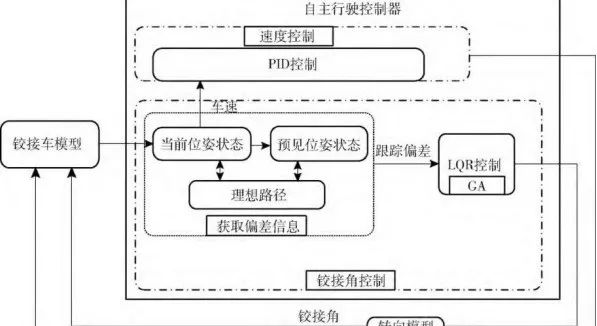
PID控制 PID控制又称比例-积分-微分控制器。在自动驾驶汽车跟踪控制中,该算法主要是对车辆反馈的....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 17:50
•8663次阅读
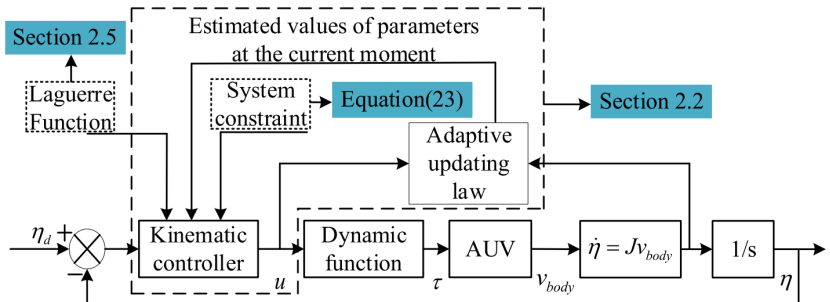
MPC控制 模型预测控制(Model predictive control,MPC)从上世纪70年代....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 17:44
•16418次阅读
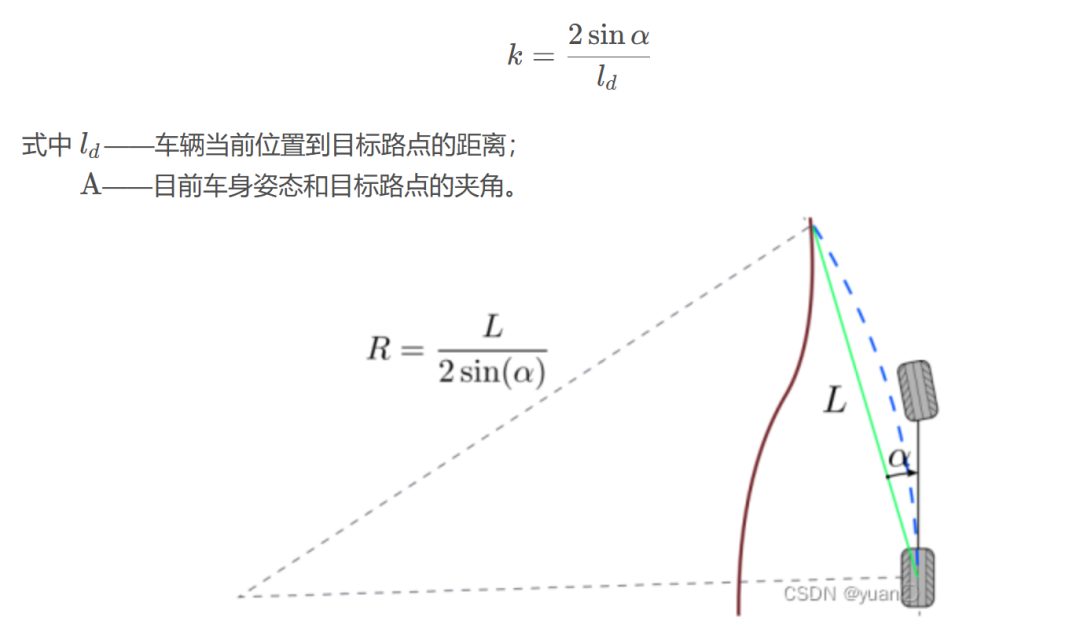
2.1 基于自行车模型的路径跟踪控制算法 2.1.1 纯跟踪控制(Pure Pursuit)算法 纯....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 17:36
•1954次阅读
行为决策在自动驾驶系统架构中的位置 Claudine Badue等人以圣西班牙联邦大学(UFES)开....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 17:30
•1718次阅读
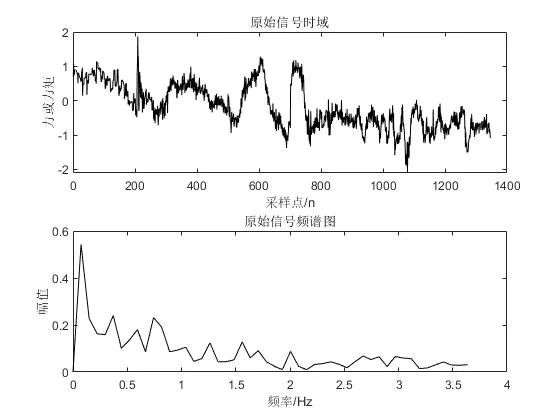
下面举一些例子,实现对机器人接触力的数据滤波! 首先是导入数据: clc clear all ; c....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 17:23
•1349次阅读
具有单轴力传感器的单关节机械臂接触力估计: 接触力估计需要考虑多个因素进行补偿,以提高估计的准确性。....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 17:08
•1607次阅读
力控机器人本身关节具有力传感器,可为什么还需要接触力滤波和估计呢?这是不是有些多余?显然是不是的,本....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 17:01
•1294次阅读
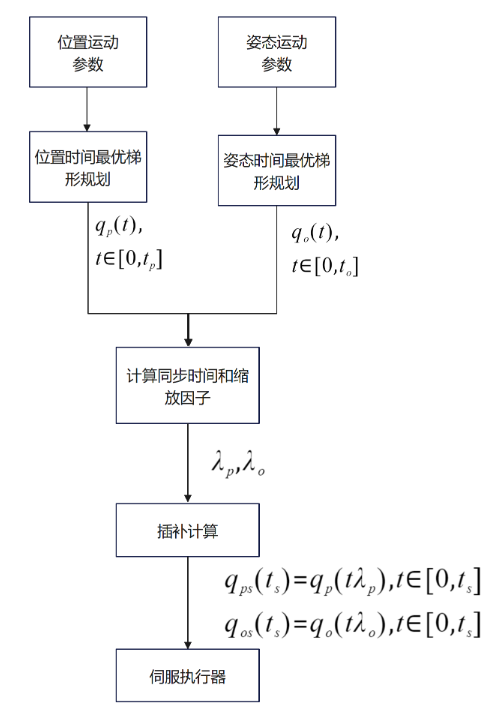
基于上面的原理,不管是q(t)是何种加减速算法生成,都可以使用上面的时间缩放法进行时间同步,下面以梯....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 16:56
•1708次阅读
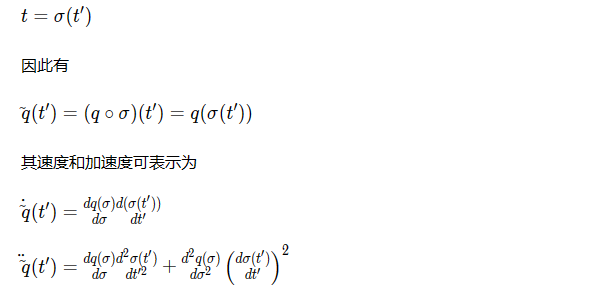
时间缩放法的初衷是用于修改轨迹,避免轨迹违反系统饱和约束限制的,我们先阐述其原理,然后将其用于实现速....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 16:50
•1444次阅读
一般而言,多轴机器人的任务一般是通过控制末端工具的位置和姿态来完成,会涉及位置和姿态两个量 , 所以....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 16:40
•2108次阅读
使用中断 通过配置串口的接收作为中断源,开启中断输出控制,配置NVIC。开启中断通道。 //开启中断....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 16:33
•1826次阅读
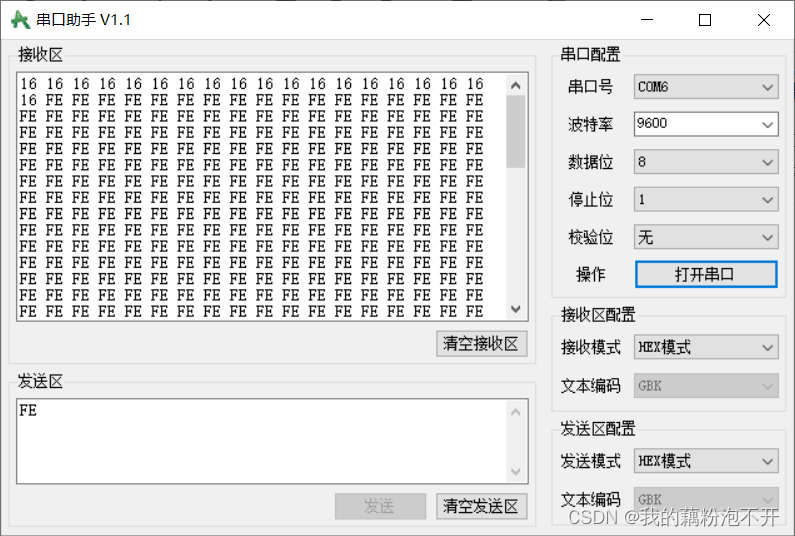
上方是发送数据的例子,那么串口接收又该如何配置,又要在串口发送的例子上做哪些更改呢? 这里我们可以通....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 16:20
•4000次阅读

首先要明确几点:使用STM32串口外设中的哪一个?串口发送或者接收数据?串口相关的参数配置?发送或接....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 16:09
•4027次阅读

USART是STM32内部集成的硬件外设,可以根据数据寄存器的一个字节数据自动生成数据帧时序,从TX....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 16:04
•2720次阅读
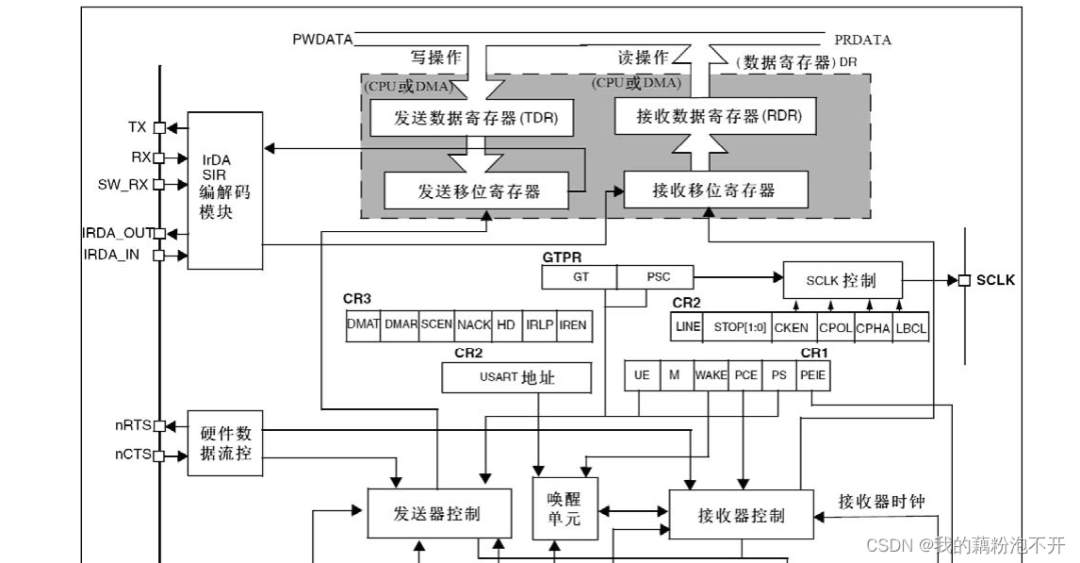
STM32里的串口通信 在STM32里,串口通信是USART,STM32可以通过串口和其他设备进行传....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 15:58
•5071次阅读
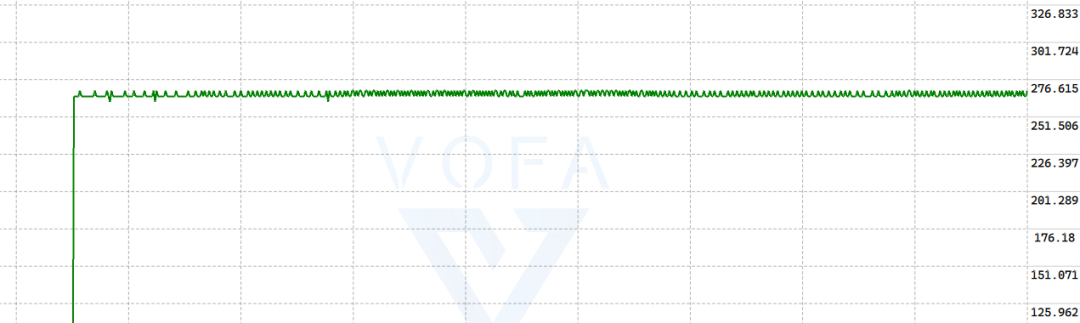
如果将测得的速度值用VOFA+上位机画出来,我们可能会看到这样的曲线 从图中我们可以看到,速度值在目....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 15:48
•2515次阅读
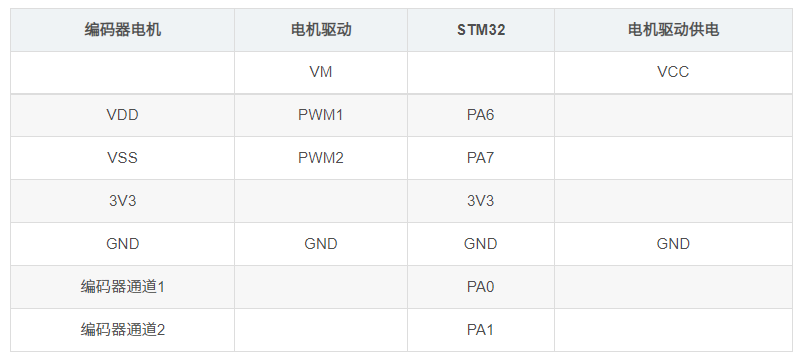
接线 编码器电机、电机驱动(这里用的L298n)、STM32、电源(可以是12V电池)的接线如下 3....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 15:39
•2787次阅读
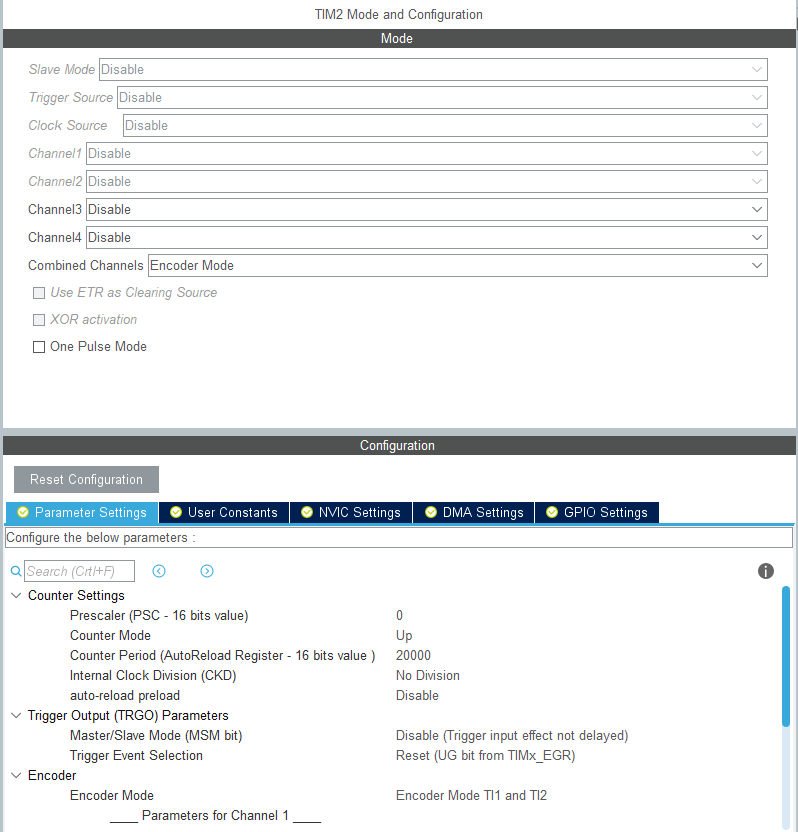
为了进行测速,我们一共需要3个定时器,作用分别是:①输出PWM;②编码器模式进行脉冲计数;③计时,确....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 15:31
•2652次阅读
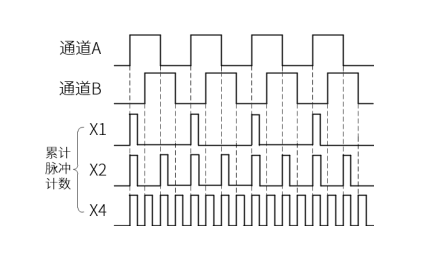
2.1 倍频技术 编码器会输出两路方波信号,如果只在通道A的上升沿计数,那就是1倍频;通道A的上升、....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 15:28
•8946次阅读
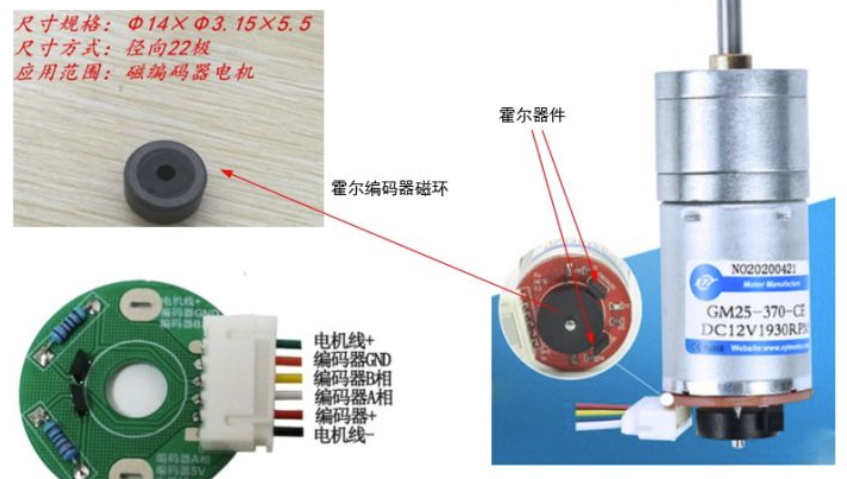
编码器种类及原理 常见的编码器有两种,分别为霍尔编码器和GMR编码器。 1.1 霍尔编码器 霍尔编码....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-10 15:21
•6262次阅读
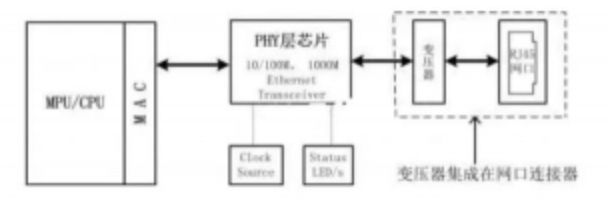
以太网是一种计算机局域网技术。IEEE组织的 IEEE 802.3标准制定了以太网的技术标准,它规定....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 18:14
•2971次阅读
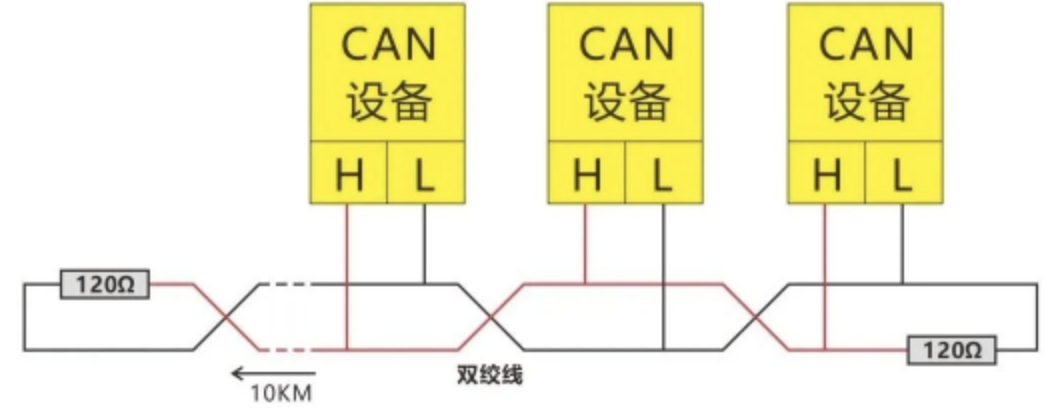
CAN总线 CAN是控制器局域网络的简称,是一种能够实现分布式实时控制的串行通信网络。CAN总线的功....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 18:11
•3783次阅读
UART、SPI、I2C比较 I2C线更少,比UART、SPI更为强大,但是技术上也更加麻烦些,因为....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 18:06
•2961次阅读
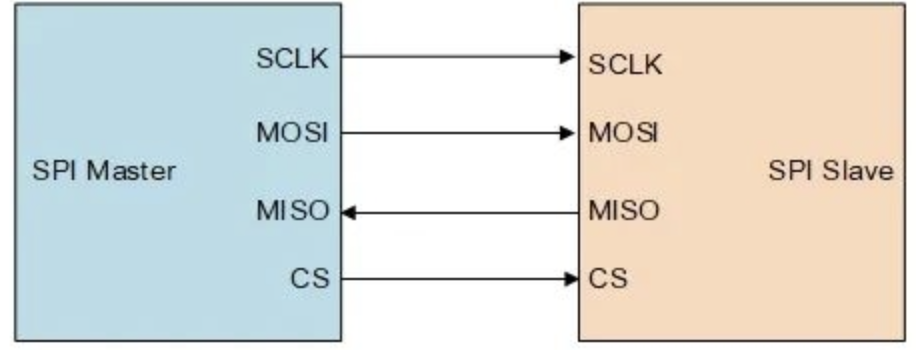
SPI用于CPU与各种外围器件进行全双工、同步串行通讯。它只需四条线就可以完成MCU与各种外围器件的....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 17:52
•1717次阅读
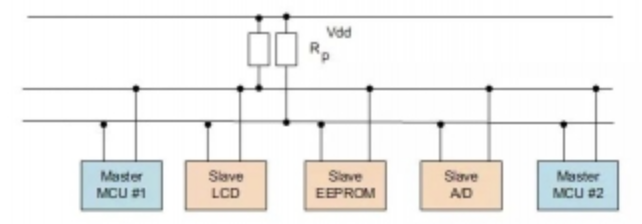
I2C(集成电路总线),由Philips公司(2006年迁移到NXP)在1980年代初开发的一种简单....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 17:48
•1442次阅读
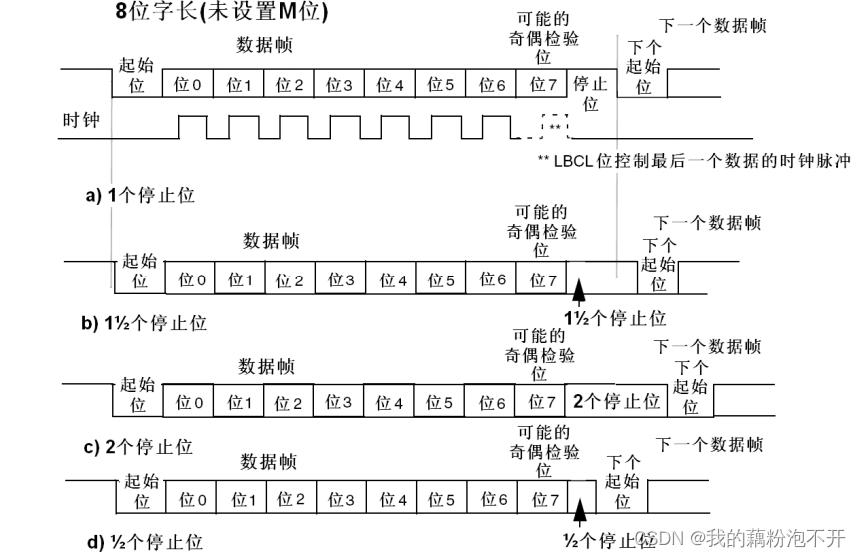
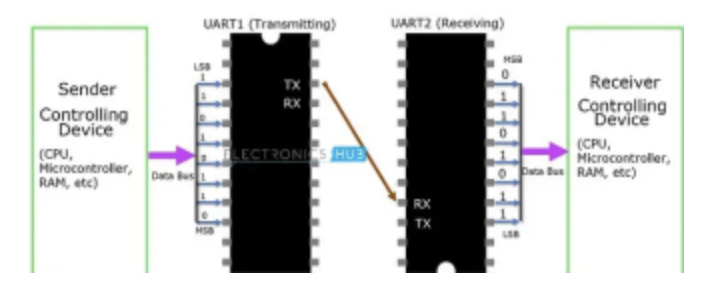
数据帧 对于发送设备和接收设备来说,两者的串行通信配置应该设置为完全相同。 起始位:起始位是在实际数....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 17:42
•1715次阅读
UART通用异步收发器(串口通信) 一般来说,开发过程中我们通常使用串口进行DEBUG调试。 原理 ....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 17:32
•1829次阅读
力控制的关键问题是如何准确地控制机器人的力或力矩输出,以满足特定的任务需求。以下是一些与力控制相关的....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 17:26
•2198次阅读


























