 机器人摆动相轨迹设计
机器人摆动相轨迹设计
1、摆动相轨迹设计
基于第二节中提到的原则,文献[1]中提出了一种基于复合摆线形式的轨迹规划方法,并在文献[2]中得到了验证和使用。
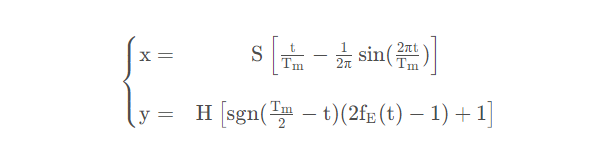
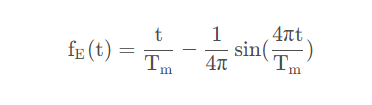
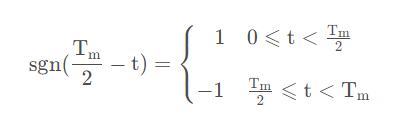
针对机器人足底与地面接触时会产生滑动和行走过程中拖地问题,文献[2]对复合摆线规划方法提出了修改,修改后的摆动腿的步态规划轨迹定义为:
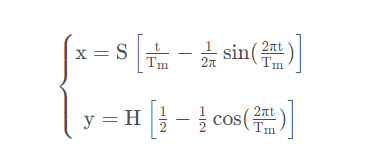
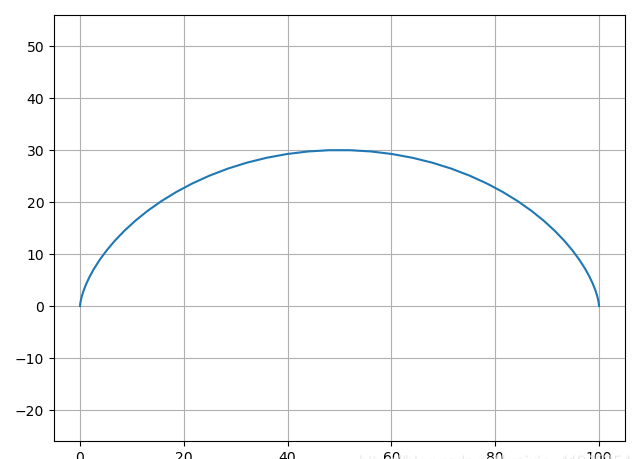
其中S为步幅, H为抬腿高度,T m 为摆动相周期现在我们来看提下它的图像,设定S = 100, H = 30, 周期T=2。
我们用python绘制该轨迹的图像如下:
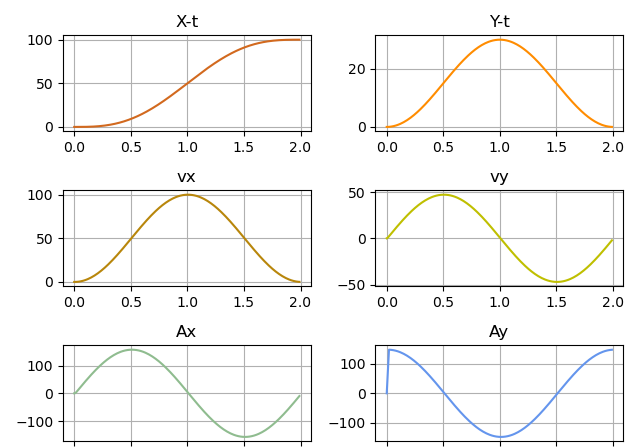
为了更好地研究该轨迹的特性,我们接下来依次看x,y关于时间的位置,速度,加速度
2、轨迹改进
从表达式上分析,该轨迹的加速度方程是余弦函数的倍数,在 t=0 和 t=Tm时刻会出现加速度跳变,根据F = M a
,这就导致了抬腿的瞬间要求产生较大的接触力。
从加速度图像亦能说明这一点。针对这一问题,文献[5]对 y 方向的位移方程提出了以下修改。
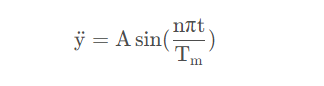
由于摆动腿在 y 轴运动需要先抬腿再落腿,借鉴 x 轴正弦方式运动的方法求解 y 轴位移曲线
先从加速度函数入手,我们设计成如下形式:
对上式进行积分求得速度函数:

对速度函数进行积分,求得位移函数为:

为了确定n的取值,我们来看看n取不同值时的速度图像,取T = 2 , H = 1 , S = 1
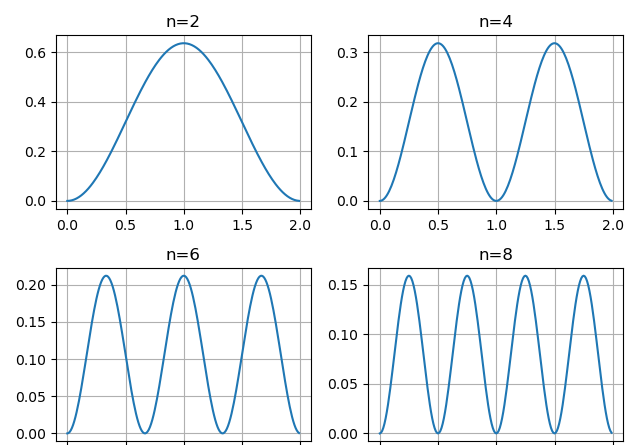
可以看出,当n越大时,y方向上的速度变化就越频繁,这可能会导致系统能耗的增加。
再来看位移图像:
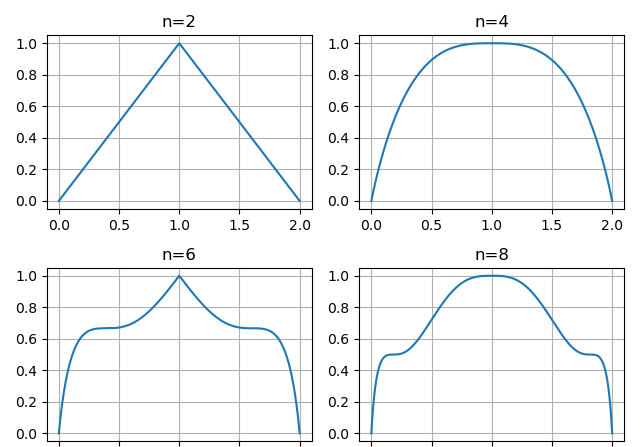
从位移图像来看,只有当n取4时,轨迹才是平滑的。因此我们可以确定轨迹的最终形式为:
其中
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
27043浏览量
201418 -
函数
+关注
关注
3文章
3882浏览量
61310 -
轨迹
+关注
关注
0文章
45浏览量
9213
发布评论请先 登录
相关推荐
用labview能实现挖掘机机器人的轨迹规划吗?
现在做毕业设计,是基于labview的挖掘机器人轨迹规划与控制,就是用labview来实现轨迹规划的编程,请教各位,这容易实现吗?该从哪入手啊?谢谢了!
发表于 04-01 14:32
工业机器人的基本结构
)用于控制机器人各运动部件的位置、速度和加速度,使机器人手爪或机器人工具的中心点以给定的速度沿着给定轨迹到达目标点。通过传感器获得搬运对象和机器人
发表于 01-19 10:36
什么是工业机器人
` 本帖最后由 大连云港 于 2015-1-19 11:02 编辑
工业机器人是面向工业领域的多关节机械手或多自由度的机器人。工业机器人是自动执行工作的机器装置,是靠自身动力和控
发表于 01-19 10:58
机器人视觉——机器人的“眼睛”
目前产业机器人仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了机器人的应用。利用机器人的视觉控制,不需要预先对产业机器人的运动
发表于 01-23 15:02
【机器人在线】喷涂机器人轨迹偏差优化的发展现状
具体而言,工业机器人的控制可以分成笛卡尔空间的轨迹规划和关节空间的轨迹规划。笛卡尔空间的轨迹规划是以机器人末端执行器在笛卡尔空间运动时的位姿
发表于 07-12 13:26
基于机器人的曲线焊接系统
成反比,因此,焊接电流的变化可以反映摆动中心与坡口中心的偏移,如图 5 所示。若实际焊缝位置未偏离示教轨迹,则焊枪摆动到左右极限位置时的焊接电流相同,无需修正机器人示教
发表于 03-13 09:15
机器人系统是什么?
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及
发表于 09-10 10:44
仿生机器人开源资料(原理图+源码+论文)
算法构建机器人 的运动步态,之后运用六次轨迹规划算法模拟出六足动物的抬腿摆动轨迹,最后 经由运动学的求逆,运算出每个关节的旋转角,进而模拟出六足动物的运动步态。
发表于 10-13 09:13
差速移动机器人轨迹跟踪控制方法
差速移动机器人轨迹跟踪控制方法一、引言二·、基础准备1.去除GPS数据中的坏点2.经纬度与平面坐标系转换3.差速移动机器人数学建模三、基于PID的差分移动机器人
发表于 09-01 08:41
浅谈差速机器人的纯轨迹跟踪仿真
差速机器人的纯轨迹跟踪仿真(Matlab)刚入门,有的地方不对,烦请大家指正。目录差速机器人的纯轨迹跟踪仿真(Matlab)1 差速机器人运
发表于 09-01 08:11





 工商网监
工商网监
评论