MOS 管的开启与关闭 要研究这个自举的由来,我们还是先看一下 MOS 的开启与关闭。从上文得知,我....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-20 16:27
•4585次阅读
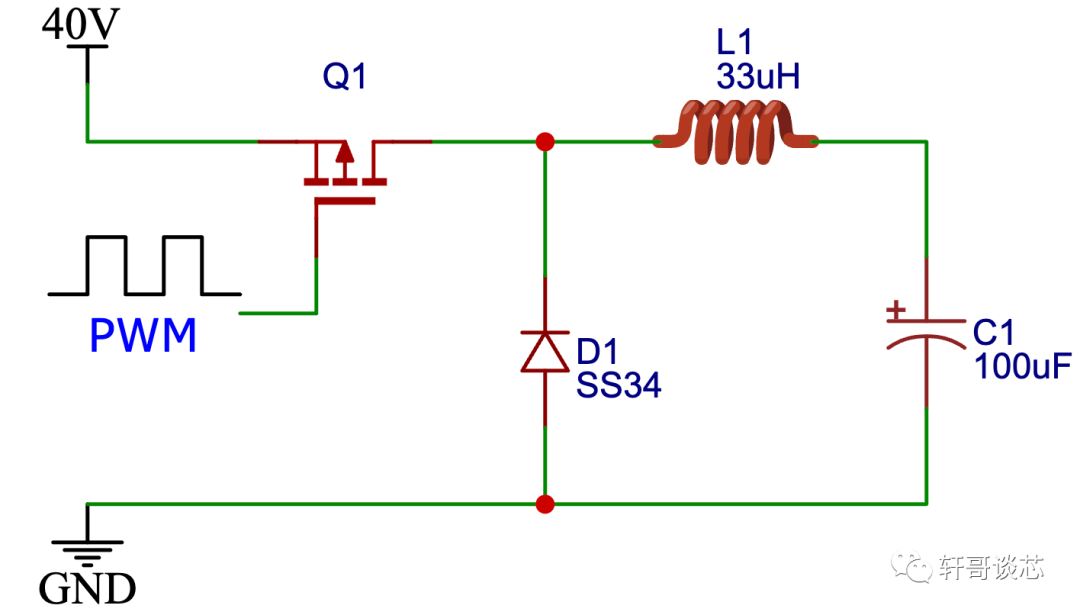
在以往的电子产品设计中,我经常会选用到 DCDC 芯片,不过大部分情况下是基于 Buck拓扑的,这主....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-20 16:13
•1815次阅读
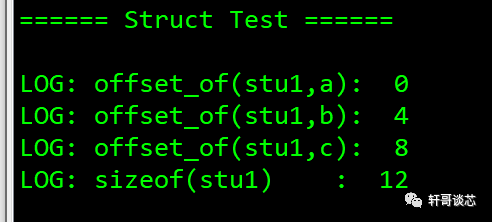
嵌套的结构体,字节又是如何对齐的呢 先来看下面的代码 typedef struct stu1 { c....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-20 16:01
•1341次阅读
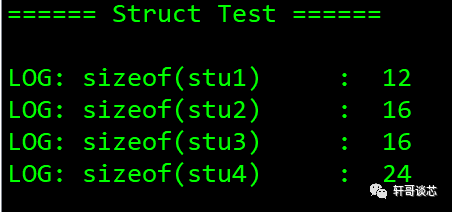
什么是结构体的字节对齐现象 程序员,咱都用代码说话,先上 code: (说明:以下代码均在 ARM ....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-20 15:55
•1469次阅读
运行 安装上面的步骤,到这里就全部安装好了,体验LLM有两种方式,一个是直接在shell窗口中以聊天....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-20 15:52
•1513次阅读
一、安装 1. OriginBot系统安装 目前OriginBot系统有V1和V2两个版本,只有V2....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-20 15:46
•1114次阅读
作为无人车以及智能机器人而言,在装配过程中各个传感器之间的外参标定一直是比较头疼的问题。这里作者也系....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-20 15:34
•3588次阅读

这里以一个智能车代码工程为例,抽取串口通信部分代码 在头文件中,进行串口头文件的包含 # inclu....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 18:10
•2037次阅读
创建设备别名 需要创建设备别名原因: 在运行一个ros程序的时候需要提供一个端口名,这个端口名一般是....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 18:07
•1759次阅读

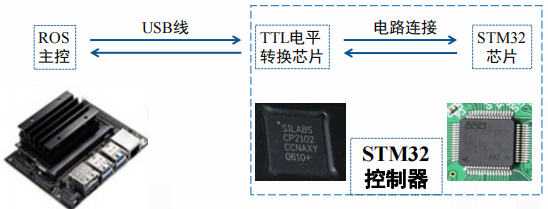
硬件连接 ROS主控通过usb线连接到一个TTL电平转换芯片,再由这个电平转换芯片连接STM32芯片....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 18:00
•1896次阅读
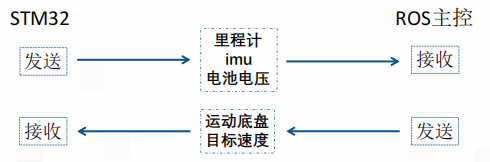
以简单的智能车为例,一般会存在两个控制器,一个是运行ROS的主控,另一个是运行电机控制和传感器信息采....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 17:54
•1787次阅读
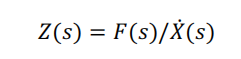
阻抗控制在频域范围内的定义: 考虑到交互力与位置的关系,可以演变为如下模式: 阻抗可以以期望惯量、阻....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 17:47
•2013次阅读
机器人具有高度非线性,强时变以及强耦合等动力学特性,为了提高机器人控制的性能,研究人员提出了基于模型....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 17:43
•1815次阅读
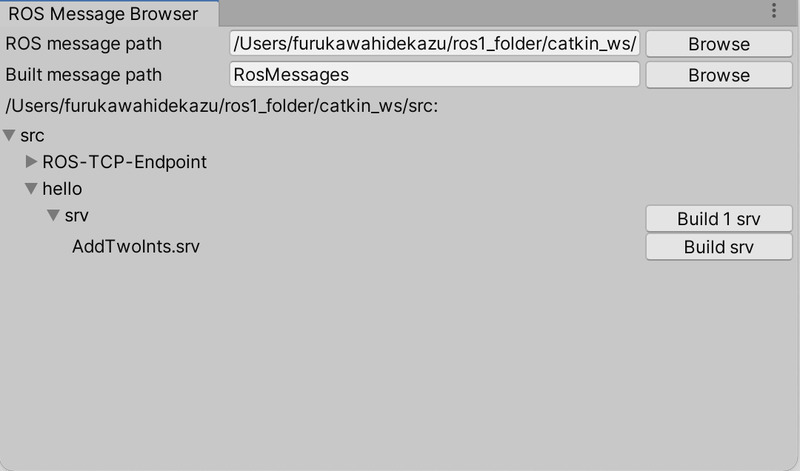
Service话题 首先使用同样的方法可以完成srv文件的导入 服务端的实现。Hierarchy窗口....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 17:36
•1379次阅读
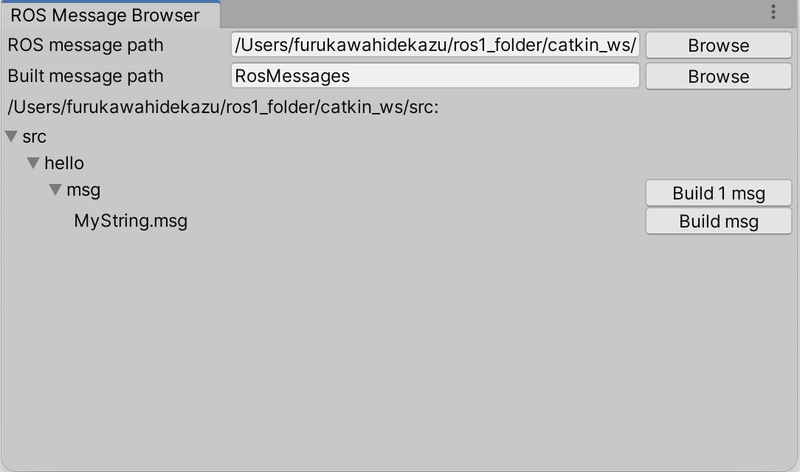
自定义msg 将消息导入Unity的步骤如下所示: 1.Unity的菜单“Robotics→Gene....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 17:26
•1400次阅读
对于ROS而言,其最常用的就是Topic话题以及Service两个了。之前我们在了解Unity Ro....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 17:22
•2440次阅读

柔性机械臂 刚性机械臂建模方法已经可以有效地求解出机械臂各部分之间的耦合情况,但是对于柔性机械臂的动....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 17:12
•1916次阅读
刚性机械臂 机械臂建模是机械臂控制的基础,控制效果的好坏很大程度上决定于所建立的动力学模型的准确性。....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 17:03
•2012次阅读
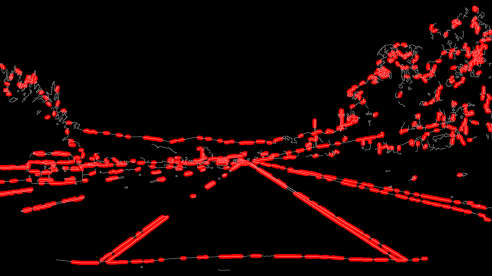
Canny边缘检测+霍夫变换 颜色阈值+图像掩模的方法虽然简单,但是只能应对一些固定颜色车道线的场景....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 16:55
•2246次阅读
1.颜色阈值+ 区域掩模 我们可以仅仅通过设置一些RGB通道阈值,来提取车道线。 以下的代码设置了R....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 16:49
•1079次阅读

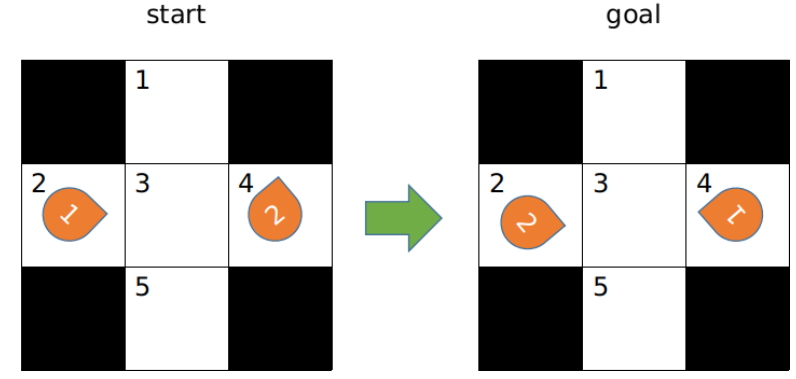
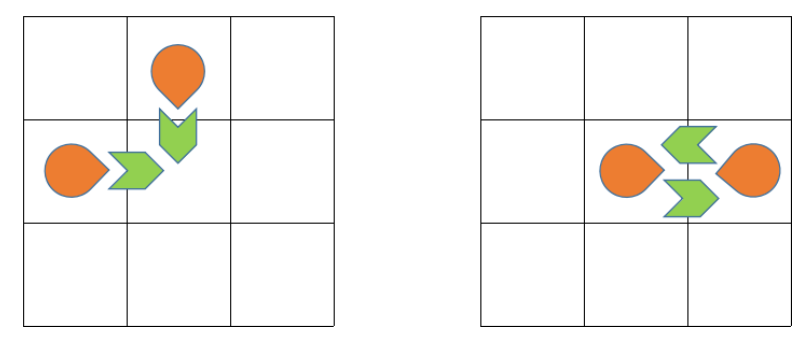
实例讲解 以下将通过一个简单的实例讲解CBS的基本过程,实例如图2所示。 图2 初始和目标状态 CB....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 16:44
•1874次阅读
单个机器人通过路径规划、运动控制,能够躲避环境中的障碍物,但会面临一个严峻的问题。当一个场景中存在多....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 16:20
•1758次阅读
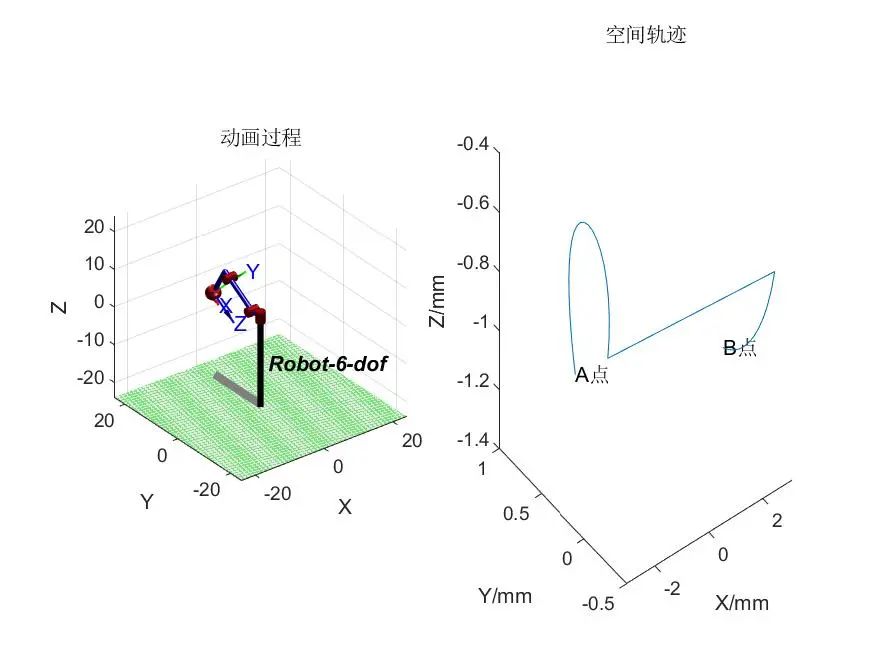
采用五次多项式插值法进行机械臂轨迹规划,基于Matlab Robotics Toolbox平台进行关....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 16:11
•2896次阅读
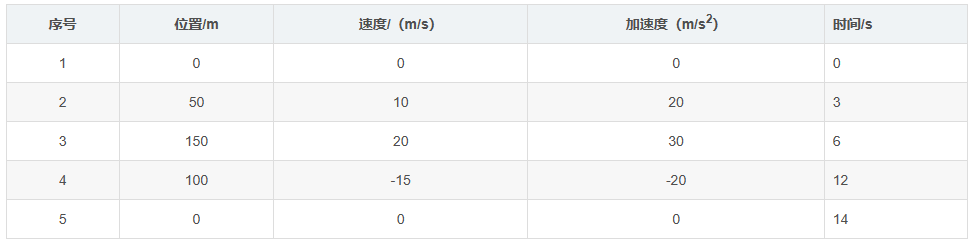
五次多项式插值法 五次多项式有6个待定系数,可同时对起始点和目标点的角度、角速度和角加速度给出约束条....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 15:57
•3922次阅读
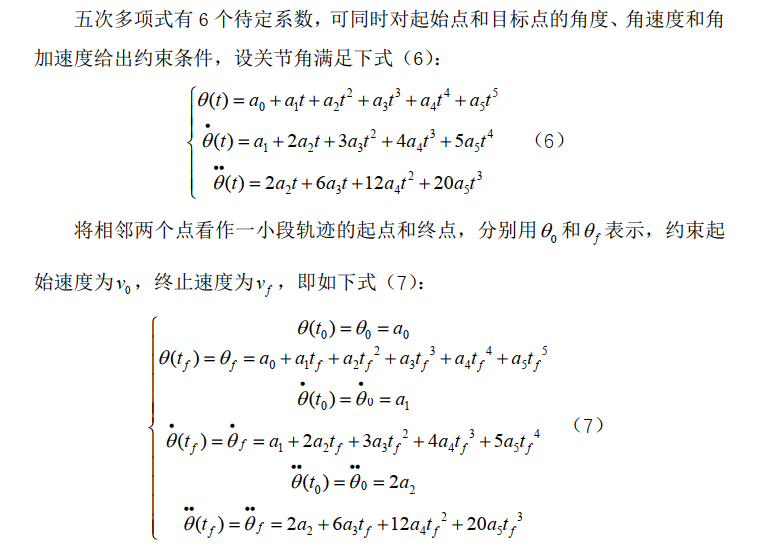
对串联机械臂而言,轨迹规划可以分为:关节空间轨迹规划和笛卡尔空间轨迹规划。关节空间轨迹规划是把机器人....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 15:52
•2778次阅读
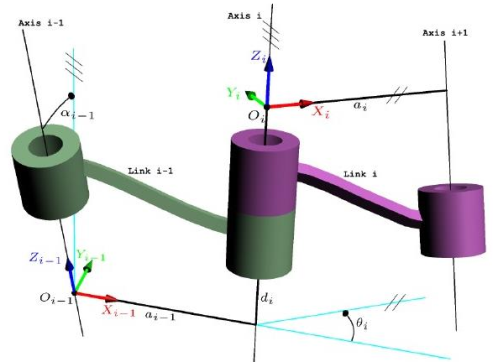
该机械臂 6 个关节都是转动关节,前 3 个关节确定手腕参考点的位置,后 3个关节确定手腕的方位。和....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-17 15:48
•5153次阅读
总体模型 将以上两组单独的测量结果叠加起来,形成卡尔曼滤波器中使用的观测向量。 同样,每个度量的协方....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 18:04
•1392次阅读
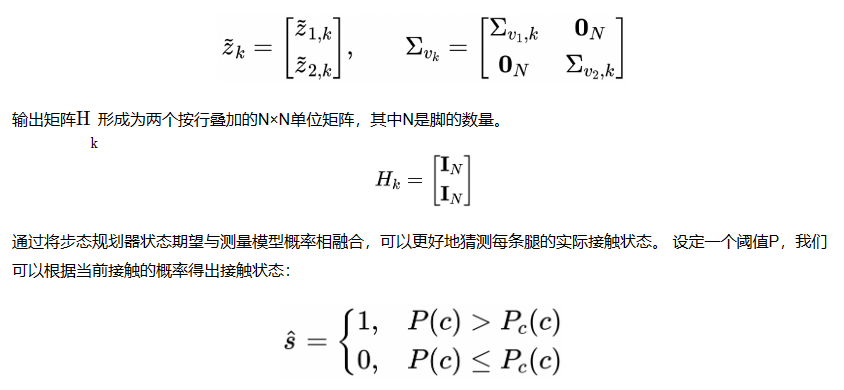
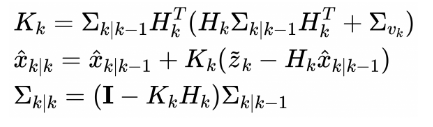
测量模型(update模型) 预测模型中极有可能包含了规划器所产生的误差,因此,我们可以使用更多的测....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 17:57
•1196次阅读
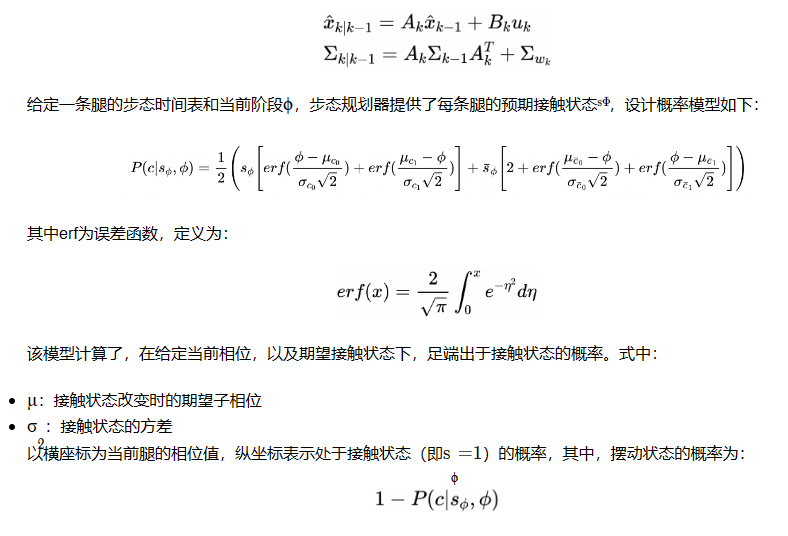
接触检测 步态规划器给出的接触序列是严格按照时间进行周期性计算的。而在实际运行当中,由于地形的不平整....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 17:51
•1975次阅读
步态规划 因为我们的四足机器人足端,是在不停地与地面接触,悬空(摆动),所以这里说的步态规划,其实指....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-16 17:33
•1846次阅读