近日,九识智能与导远科技正式达成战略合作,导远科技将通过多款软硬件产品赋能九识智能低速无人车。
2025-12-25 17:10:56 1959
1959 惯性测量单元(IMU)长久以来被视为航空航天和高端导航领域的核心技术。然而,随着微机电系统(MEMS)技术的成熟,高性能、低成本、小型化的IMU已彻底突破传统疆界,成为工业4.0时代不可或缺
2025-12-24 10:08:23190 (1)Rds(on)和导通损耗直接相关,RDSON越小,功率MOSFET的导通损耗越小、效率越高、工作温升越低。
(2)Rds(on)时正温度系数,会随着MOSFET温度升高而变大,也就是Rds
2025-12-23 06:15:35
“1+1>2”的融合哲学,是组合导航区别于任何简单传感器拼接的根本所在。它并非简单的GNSS与INS的拼接,而是一种信息层面的、动态的、智能化的数据融合,要达到这种融合,我们就必须要学习
2025-12-18 16:16:3597 近期,导远科技与中国电动叉车领域的龙头企业展开合作,为其多款自动驾驶叉车提供高精度惯性测量单元(IMU)模组,进一步强化车辆的空间定位能力。此次合作中,IMU被安装在激光雷达正下方,通过不依赖外部环境的高频、连续的自主惯性数据输出,为设备的定位系统提供更稳定的运动参考。
2025-12-17 10:38:27526 近日,搭载导远科技自研IMU模组的广汽昊铂GT攀登版在广汽埃安智能生态工厂正式下线。作为工信部专项项目验收车型,该车实现芯片设计100%国产化,标志着我国智能新能源汽车核心硬件自主化能力进一步提升。
2025-12-17 10:34:36637 
近日,2025第三届中国电气工程大会在浙江杭州举办,大会期间,智芯公司和北京邮电大学协同组织的“先进通信技术赋能新型电力系统”专题论坛于21日召开。本届大会由中国电工技术学会等单位联合主办,中国电
2025-12-02 10:30:02421 在工业控制与数据采集场景中,“回路导通检测 + 异常停机” 是保障设备安全、避免误操作的关键需求。如何使用NI 9203检测回路导通,下面请跟随小编一起来学习一下吧!
2025-11-26 17:05:052543 
#IMU选型 #工程监测 做老旧隧道监测的来求助!之前用刚性IMU,隧道里有震动就容易飘数据,换了两台都没解决,老板快把我骂哭了?
听朋友说全柔性IMU靠谱,说能像创可贴一样贴在隧道壁上,抗震动抗
2025-11-25 17:02:54
随着MTi-8和MTi-680(G)RTKGNSS/INS的发布,Xsens还引入了一个新的配置参数,称为GNSS杠杆臂(LevelArm)。GNSS杠杆臂是获得可靠的厘米级位置、速度和方向数据
2025-11-24 12:05:03222 
电子发烧友网综合报道 激光雷达和视觉融合的传感器,近年来似乎成为了一个趋势。这种融合的趋势有几种方向,一是将摄像头和激光雷达集成在一个模块中,比如卓驭的“激目”传感器系统,集成惯导、三目摄像头
2025-11-21 08:50:004571 
在追求高效光传输的科技道路上,友思特液态光导以其独特的结构和卓越的性能,正逐渐成为一种创新解决方案。与传统玻璃光纤相比,液态光导由内部的特殊成分液体、外部的含氟聚合物管构成,两端用石英或玻璃窗密封。
2025-11-13 13:19:34278 
在电池管理系统(BMS)中,MDD辰达半导体MOSFET作为电池组充放电的开关与保护核心元件,其导通电阻(RDS(on))参数对系统性能有着直接且深远的影响。作为MDDFAE,在支持客户调试或可
2025-11-12 11:02:47339 
XsensMTiAHRS和GNSS/INS产品用于各种汽车应用,例如自动驾驶汽车、卡车、穿梭巴士和火车。XsensMTiGNSS/INS旨在使用融合的IMU和GNSS数据来改进运动中车辆的方向和位置
2025-11-07 12:04:40472 近日,导远科技自研的6轴车规级MEMS IMU GST80已通过AEC-Q100可靠性测试。
2025-11-06 16:04:32882 、芯片厂商和云计算服务商的众多嘉宾,展示了P+V(高精度定位服务+环境感知)方案、INS Pro高性能卫惯一体产品等创新成果,彰显了其从“精准定位”迈向“AI感知”的战略升维突破。
2025-11-06 10:00:20316 IMU P/N 596-7347通过实时监测工程机械的姿态与运动数据,为设备精准控制和安全运行提供关键支持。其在挖掘机、装载机等复杂工况下展现的测量稳定性与环境适应性,有效提升了作业效率与设备可靠性,符合现代施工对智能化的需求。
2025-11-05 09:50:44238 
直川科技IMU P/N 563-0598通过三轴加速度、滚动角等六参数同步测量,结合工业级防护与数据冗余设计,为卡特彼勒系列工程机械提供高精度运动状态监测,有效提升作业安全性与设备可靠性,助力智能运维升级。
2025-11-03 10:06:33262 
在无人机精准悬停、自动驾驶汽车平稳过弯的背后,有一颗至关重要的核心处理器 - 惯性测量单元(IMU)。它的精度,直接决定了智能设备感知自身姿态的准确度。一颗高精度的IMU,其卓越性能离不开生产环节
2025-10-30 10:56:21277 
STMicroelectronics LSM6DSV32X 6轴惯性测量单元 (IMU) 是一款高性能、低功耗的6轴小型IMU,配备3轴32g数字加速度计和3轴数字陀螺仪。这些集成元器件提供了采用
2025-10-23 15:00:35626 
随着视觉惯性传感器在自动驾驶、机器人、AR/VR 等领域规模化落地,多相机+IMU 联合标定需求呈爆发式增长,多相机+IMU 联合标定领域尚属空白。
感算商城联合知名方案公司推出国内首台量产级
2025-10-23 14:04:48
STMicroelectronics ISM6HG256X智能惯性测量单元 (IMU) 是一款高性能、低噪声、低功耗的6轴IMU。该设备配备了三轴数字低重力加速度计 (16g)、三轴数字高重力加速计
2025-10-15 09:11:30683 
直川科技通过持续优化IMU传感器的环境适应性与数据可靠性,为卡特彼勒挖掘机提供了兼顾精度与稳健性的姿态感知方案。其P/N312-0755产品在多个大型项目中的实践表明,基于工业标准设计的IMU已成为重型机械智能升级的关键组件。
2025-10-11 11:04:52423 
近日,导远科技获得工信部电子五所颁发的自主可控评测报告,确认该公司研发的6轴车规级MEMS IMU GST80惯性传感器芯片符合自主可控要求。
2025-10-09 11:33:34757 近日,导远科技与中移(上海)信息通信科技有限公司(简称“上研院”)在湖南株洲举办的第四届北斗规模应用国际峰会上宣布深化合作。双方将联合打造适配多种移动机器人的“IMU+GNSS模组+RTK服务”一体化高精度定位解决方案。
2025-10-09 11:31:22661 9月24-25日,第四届北斗规模应用国际峰会在湖南株洲举办。作为通导融合领域领先企业,海格通信(股票代码:002465)集中展示了面向“通导融合”发展的系列技术创新成果。在推动技术产品化的同时,公司
2025-09-28 17:00:421007 电子发烧友网综合报道 目前,人形机器人对 IMU(惯性测量单元)芯片的需求主要集中在高实时性、高精度、小尺寸、低功耗等方向,尤其适用于姿态控制、平衡维持、导航定位与动作执行等关键场景。 具体而言
2025-09-23 09:08:273188 近日,国内领先的功率半导体厂商芯导科技(股票代码:688230.SH)隆重出席了2025亚洲AI音频大会,在大会上,芯导科技深度展示了其针对智能耳机与智能音响领域的最新功率半导体解决方案,吸引了行业内外众多关注。
2025-09-20 11:33:021257 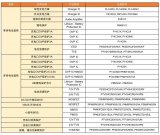
惯导数据采集板和惯导数据存储板侧重于惯性测量数据的记录与后续分析,对于测试、验证、故障诊断和事后分析至关重要。
2025-09-16 15:58:42410 
精度是测绘级MEMS组合导航系统在无人装备、精密测量等场景应用的核心依据。本文以国产ER-GNSS/MINS-01(以下简称“组合导航01”)与欧洲某著名惯导公司产品为研究对象,从姿态航向精度、定位
2025-09-08 09:51:50627 TDK株式会社(东京证券交易所代码:6762)重磅推出全新的SmartMotion® ICM-536xx系列高性能六轴IMU,并向特定客户开放供货。
2025-09-05 09:15:35895 网线铝箔屏蔽纸通常采用双导结构,即铝箔层同时具备导电和屏蔽功能,且部分设计会结合金属编织网形成双层屏蔽,以增强对高低频干扰的防护能力。以下是对单导和双导铝箔屏蔽纸在网线中应用的详细分析: 单导铝箔
2025-09-04 10:57:53593 第一届OpenHarmony CTF专题赛决赛在香港科技大学深港协同创新研究院成功举办。经过激烈的线上初赛,从566支战队、1307名选手中选拔出的15支顶尖CTF战队、60位优秀选手会师于此,向冠军之位发起冲击。
2025-09-03 09:58:261276 IGBT模块的开关损耗(动态损耗)与导通损耗(静态损耗)的平衡优化是电力电子系统设计的核心挑战。这两种损耗存在固有的折衷关系:降低导通损耗通常需要提高载流子浓度,但这会延长关断时的载流子抽取时间
2025-08-19 14:41:232335 GNSS/INS惯系统(GNSS/INS,GlobalNavigationSatelliteSystem/InertialNavigationSystem)是一种将全球导航卫星系统(GNSS)与惯性
2025-08-14 19:33:35912 
无人机在天空中自由穿梭、稳稳悬停,背后究竟是什么在发挥关键作用呢?这就不得不提到一个重要部件 ——IMU。
2025-08-12 14:27:241264 惯导系统内部关键零部件带4孔定位,内装光纤陀螺仪,安装的陀螺仪需要保障准确的位置度及角度关系,因此,该零件需要对上下顶面的平面度,前后左右圆柱的同轴度、垂直度、各孔的直径以及4孔两两同轴度及4孔的孔
2025-08-11 13:40:11978 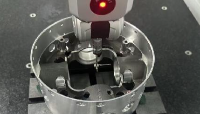
惯导系统内部关键零部件带4孔定位,内装光纤陀螺仪,安装的陀螺仪需要保障准确的位置度及角度关系,因此,该零件需要对上下顶面的平面度,前后左右圆柱的同轴度、垂直度、各孔的直径以及4孔两两同轴度及4孔的孔
2025-08-11 13:37:27 0
0 光耦的导通条件主要包括以下几点: 一、输入电流达到阈值 光耦的导通条件之一是输入电流(通常是指发光二极管LED的电流If)需要达到一定的阈值。当输入电流小于该阈值时,光耦处于关断状态;当输入电流大于
2025-07-31 09:59:041120 
STM32 GPIO 开漏模式,NMOS 导通时能承受多大电流而不至于损坏。
2025-07-31 07:13:39
A22-3分立半导体器件(MOS管)知识与应用专题
2025-07-30 09:57:0118528 
A22-2分立半导体器件(三极管)知识与应用专题
2025-07-30 09:55:23446 
A22-1分立半导体器件(二极管)知识与应用专题
2025-07-30 09:46:5912891 
IMU的精度对无人机姿态控制至关重要,是决定无人机飞行稳定安全、响应性和任务执行能力的关键因素之一, IMU(包含三轴加速度计和三轴陀螺仪)是飞控系统实时估算无人机姿态(俯仰、横滚、偏航角)的核心
2025-07-25 17:01:10629 导领域的领先优势,深化光纤陀螺及惯导核心光学器件布局,并推动高集成、高精度、高性价比光纤陀螺及光纤惯导系统的研发与量产。 同时,天陆海导航宣布与战略伙伴签署万台量级高精度光纤惯导系统供应协议,标志着其技术实力与量产能
2025-07-24 18:20:081389 在无人机从消费级向工业级/行业级跨越的过程中,"精准" 与 "稳定" 成为核心竞争力,这依赖于底层惯性测量技术的突破。IMU是无人机稳定控制的核心,它直接
2025-07-23 15:21:28900 在无人机与机器人领域,精准的姿态感知和运动控制是实现复杂任务的核心前提,惯性测量单元(IMU)为系统提供独立、实时、高频率的角速度与加速度数据实现运动感知能力,从根本上改变了精准运动控制的实现方式,并在多个维度上对其进行了重新定义。
2025-07-22 15:15:15478 无人机悬停时姿态漂移?机器人操控失误?自动化设备精准定位总差 "临门一脚"?它们都需要一颗强大的“运动感知心脏”--IMU。
2025-07-22 13:13:10669 在无人机自主飞行的核心技术链条中,惯性测量单元(IMU)的精度与可靠性直接决定了整机的控制上限。高精度IMU对无人机系统的提升是全方位的,尤其在导航精度、稳定性、自主性和可靠性等关键性能方面。它通常是实现专业级和工业级无人机应用的核心传感器之一。
2025-07-21 15:39:28631 近日,英诺达的EDA专题技术研讨会在成都“芯火”双创基地成功举办,吸引了来自芯片设计企业、科研院所及产业链上下游的三十余家单位参会,共同探索国产EDA工具在芯片设计关键领域的创新突破与应用实践。
2025-07-21 10:38:48817 分立元件知识与应用专题--电感知识及应用案例
2025-07-15 19:24:22353 
分立元件知识与应用专题--电容知识及应用案例
2025-07-15 19:22:33371 
无人机在进行任何形式的飞行时,必须了解空中平台的方向、其运动的性质以及飞行方向。
通常用于测量此运动的是IMU,IMU提供无人机在横滚、俯仰和偏航方面的加速度和角速度数据。常见应用包括控制和稳定、测量和测试。
2025-07-15 15:05:05733 在工程机械和农用机械领域,稳定性和安全性一直备受关注。在该领域中,惯性测量单元IMU F99系列传感器正逐渐崭露头角,成为工程机械和农用机械中的得力助手。哪怕是在外部加速度失真的情况下,IMU F99依然能保持高度准确性,实时监测机械设备的倾角和加速度。
2025-07-11 16:34:51717 7月6日,第二十七届中国科协年会先进网络传感技术专题论坛在中国科技会堂顺利召开。本届年会以“示踪科技前沿 助力创新发展”为主题,由1场主论坛、98场专题论坛以及4场平行论坛组成,并设置发布、宣传
2025-07-10 17:20:02393 
在导航技术领域,GNSS(全球导航卫星系统)和INS(惯性导航系统)的结合,一直被业界誉为"黄金搭档"。它们优势互补,克服了单一系统的局限性,为高精度、高可靠性的导航提供了完美
2025-07-09 17:12:01743 
无人机稳定飞行、机器人精准控制及工业自动化都需要高精度、高可靠的运动感知,感知数据质量不足或延迟,无法有效支撑高精度、高响应的闭环控制。这类设备都会使用IMU进行运动感知,但高性能惯性测量的需求与项目严格的成本预算之间却出现了难以调和的矛盾。
2025-07-09 16:13:10476 寻北IMU是一种无需依赖GPS或磁力计等外部参考,通过利用内置陀螺仪检测地球自转角分量,经过解算即可确定真北方向的IMU。与磁力计测量出的磁北不同,真北是固定不会改变的,是地球自转轴指向的方向。磁北
2025-07-08 15:52:34552 姿态控制精度与系统集成度现已成为制约无人机性能提升的关键瓶颈。无人机通过IMU集成的陀螺仪与加速度计,实现对三维空间姿态(角速度、加速度)数据的实时测量,数据传递至飞控系统,能得到无人机的姿态、速度、位移等信息,无人机稳定飞行的核心依赖于IMU的精度与可靠性。
2025-07-07 16:16:35478 在水平定向钻孔这类复杂地下工程领域,精确的姿态和方位测量直接决定着钻井效率与轨迹精度。ER-MIMU-091 MEMS IMU 专为严苛的石油钻井、开采及水平定向钻孔(HDD)环境设计,相比光纤陀螺
2025-07-04 11:35:21830 
惯性测量单元(IMU)作为无人机飞行时运动感知的核心部件,它通过整合陀螺仪、加速度计,有时还包括磁力计、气压计等多种传感器的数据,全面掌握无人机的运动状态。这些信息对于飞行控制、姿态稳定和导航至关重要。
因此,选择一个适合无人机的IMU是非常重要的,其性能直接影响无人机的飞行控制与姿态稳定。
2025-07-04 11:33:231096 
在无人机、机器人、无人车辆等智能设备快速发展的今天,高精度姿态测量和稳定控制成为核心需求。然而,传统惯性测量单元(IMU)往往面临体积大、重量重、环境适应性差等痛点。ERICCO
2025-06-27 16:10:56480 维护管理导则本管理导则是对对旗下产品PLD-0201、PLD-810/810S、PLD-0202、PLD-0203、PLD-601、PMT-2、PMF、OPC系列等产品维护、清洗和计量的管理规范
2025-06-21 17:07:46491 
近日,维智科技创始人、时空人工智能领域专家陶闯博士受邀出席「人工智能赋能能源智造升级专题分享会」,以《时空人工智能驱动空间认知范式转变与产业实践》为主题发表核心演讲,为现场企业家、专家带来前沿洞察与深刻启发。
2025-06-18 15:54:50839 传感器IMU是LSM6DSL型号,磁强计是LIS3MDL型号,使用motionfx库进行姿态解算,遇到航向角不准确的问题。我查看地磁计的值是正常的,但是航向角不正常:例如传感器指向正北,地磁计X轴
2025-06-10 07:19:58
GNSS+INS的组合导航技术,以其卓越的可靠性和环境适应性,已成为高精度导航的核心解决方案。那么, GNSS + INS的精度究竟能达到多高? 以测绘级系统ER-GNSS/MINS-01为例,其
2025-06-04 16:31:55674 定、更精准的导航? GNSS vs. INS:核心区别 1. GNSS(全球导航卫星系统) 依赖卫星信号 (如GPS、北斗、GLONASS、Galileo)进行定位。 优势 :提供绝对位置、速度和时间,长期精度高。 局限性 :在 高楼遮挡、隧道、密林等环境 下信号易中断,影响定位连续性。
2025-05-27 15:46:131513 导通电阻(RDSON)指的是在规定的测试条件下,使MOSFET处于完全导通状态时(工作在线性区),漏极(D)与源极(S)之间的直流电阻,反映了MOSFET在导通状态下对电流通过的阻碍程度。
2025-05-26 15:09:343811 
随着技术提升,无人机领域正经历着前所未有的变革,而IMU无疑是这场变革中的关键力量。作为专业人士,您一定深知前沿技术对行业的重塑意义,今天就带您深入探寻 IMU 在无人机产业的无限潜力。 以一款[九
2025-05-26 13:55:26773 低空经济中的eVTOL(电动垂直起降飞行器)无人驾驶飞行机需要高度可靠、高精度的惯性导航系统(INS)来保障飞行安全与效率
2025-05-06 18:02:50827 
一、定义与背景 智能导视系统是融合人工智能、大数据、物联网等先进技术的综合性导航解决方案。该系统突破传统导视系统静态展示的局限性,高度重视互动性、精准性、有效性与趣味性。用户可借助交互式触摸屏、手机
2025-04-27 17:19:14658 
AnalogDevices ADIS1647x精密微型工业IMU提供了一种将完整惯性系统集成到工业及运动物联网 (IoMT)应用中的简单方法。ADIS1647x微型工业IMU采用小尺寸的标准表面贴装
2025-04-24 19:30:181148 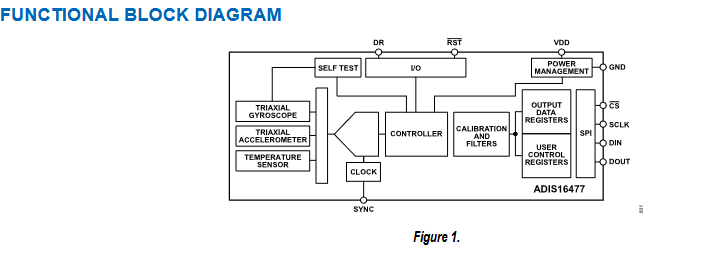
传感器IMU是LSM6DSL型号,磁强计是LIS3MDL型号,使用motionfx库进行姿态解算,遇到航向角不准确的问题。我查看地磁计的值是正常的,但是航向角不正常:例如传感器指向正北,地磁计X轴
2025-04-23 08:11:24
日前,简仪科技应中北大学仪器与电子学院邀请,再度派遣资深工程师兼企业导师王孟美前往该校,为测控技术与仪器专业 2022 级《虚拟仪器设计》课程的学生开展了一场精彩的企业导师专题教学活动,开启了校企协同育人的新旅程。
2025-04-22 09:29:28819 电子发烧友网站提供《热导仪使用说明书.pdf》资料免费下载
2025-04-16 17:12:270 (ADI)全新ADIS1657x 精密微机电系统 (MEMS) 惯性测量单元 (IMU) 模块。ADIS1657x MEMS IMU具有坚固耐用的三轴陀螺仪和加速度计,适用于导航、稳定、仪表、工厂和自主
2025-03-31 15:25:19660 近日,ICDT 2025—“AI赋能成像与显示专题论坛”在厦门佰翔会展中心成功召开。本次论坛聚焦AI技术在成像与显示领域的创新应用,汇聚了行业专家、企业领袖及技术精英,共同探索AI赋能显示的前沿趋势与实践。
2025-03-27 10:51:041106 在科技的长河中,传感器如同人类的感官延伸,让机器能够感知世界的温度、压力与色彩。而在众多传感器中,热导传感器犹如一位精准的"温度侦探",通过测量材料的导热性能,在工业自动化、环境监测、医疗健康等领域
2025-03-24 18:22:25790 本文将探讨IMU与压电薄膜传感器在机器人领域中的典型应用及未来发展方向,以及Murata(村田制作所)所推出的相关解决方案。
2025-03-12 10:22:541170 在当今快速发展的无人机技术领域,测绘巡检机载挂载已成为实现高效、精确地理信息采集的关键工具。随着城市化进程的加快和基础设施的日益复杂,对于高精度、高稳定性的测绘需求日益增长,这使得IMU(惯性测量
2025-03-05 17:38:55796 
在关键任务中遇到GNSS信号不稳定或信号中断的问题?**ER-GNSS/MINS-01** 来了——这是一款测绘级超高精度组合导航系统,结合了GNSS + MEMS INS,即使在最严苛的环境中也能提供无与伦比的精度、可靠性和连续性。
2025-02-28 14:41:41895 在当今快节奏的世界中,导航的精准性和可靠性是不容商榷的。虽然GNSS在开阔的环境中表现出色,但在城市峡谷、隧道或信号中断等情况下,仍需要一个强大的后备方案。INS应运而生,它利用高性能的MEMS
2025-02-20 16:45:541255 近期,充电头网拆解了机械师G6Pro游戏手柄,该款产品使用的过压保护芯片来自Prisemi芯导科技,型号P14C13,是一颗高集成的过压保护芯片,过压保护点为6V,耐压为32V,内置MOS管导通电阻为250mΩ,采用SOT23封装。
2025-02-19 14:30:371091 随着无人机在农业测绘、物流运输、应急救援等领域的广泛应用,市场对高精度、高可靠性导航系统的需求激增。每一次精准的姿态调整与运动响应,都离不开IMU。ER-MIMU-08 应运而生——成为无人机导航与控制系统低成本高精度的核心解决方案。
2025-02-19 09:15:20938 导远科技近日宣布,其MEMS IMU(微机电系统惯性测量单元)及多款定位产品已成功赋能比亚迪旗下的“天神之眼”高阶智能驾驶系统,并在多个车型上实现了量产交付。 自比亚迪推出“仰望”品牌以来,导远
2025-02-18 10:15:171452 近日,导远科技宣布,其多款高精度定位产品已在比亚迪旗下多个车型实现量产交付,为比亚迪的“天神之眼”高阶智能驾驶系统提供了强有力的技术支撑。 自双方合作以来,导远科技便致力于为比亚迪旗下的多个品牌
2025-02-14 15:14:311392 2月19日 “详解迈来芯机器人解决方案”专题研讨会邀请您参加。
2025-02-14 13:36:31765 摘要
VirtualLab Fusion可以利用光导元件在AR&MR器件领域对复杂的光导配置进行建模。局部光栅区域(所谓的区域)可以定义在光导表面的耦合和扩瞳的目的。光栅对光场
2025-02-12 08:50:43
在成功推出车规级I2C接口高精度RTC芯片INS5A8900与INS5A8804后,大普技术再次发力,最新发布了车规级SPI接口超宽温高精度RTC系列——INS5A4000。 INS5A4000系列
2025-02-08 10:23:011057 近日,激光陀螺仪和惯导系统领域的佼佼者——图林科技,宣布成功完成B轮融资。本轮融资由成都科创投集团领投,将有力推动成都军工电子产业链的升级,加速航空产业的建圈强链进程。 图林科技是一家专注于光电惯性
2025-02-05 16:34:031165 晶闸管(也称为可控硅)是一种重要的半导体器件,广泛应用于电力电子电路中。其稳定导通的条件对于确保电路的正常运行至关重要。 一、晶闸管的基本结构与工作原理 晶闸管是一种具有PNPN四层结构的半导体器件
2025-02-01 10:25:003257 在现代导航领域,GNSS依靠卫星信号定位,信号易受干扰;INS依赖内部传感器推算,误差会随时间累积。而ER-GNSS/MINS-01,这款组合导航产品将二者创新性结合,GNSS修正INS误差,INS维持GNSS信号不佳时的导航连续性,确保全场景稳定精准导航。
2025-01-21 15:54:01904
请问如何获得ADS1256EVM plug-ins安装于PC上?
因为直接安装ADCPro Launcher 会提示没有Internet,但确实是有的啊?所以想单独安装试试。但是只有ADCPRO.exe,没有plug-in的安装程序。
2025-01-15 07:23:37
近期,导远科技携产品连续第四年亮相在美国拉斯维加斯举办的“科技界春晚”国际消费电子展CES 2025,向全球各行各业企业展示定位系统如何促进各类终端应用的智能化转型,赋能更安全、精准的智能出行和移动。
2025-01-13 09:51:00923 在现代科技的快速发展中,传感器作为信息获取的关键元件,扮演着举足轻重的角色。其中,热导传感器凭借其独特的测量原理与广泛的应用领域,成为了工业自动化、环境监测、医疗健康等多个领域不可或缺的一部分。本文
2025-01-07 08:32:421017 
ICM-42670-P 高性能 6 轴 Motion跟踪® IMU *附件:ICM-42670-P 数据手册 替代MPU6050.pdf *附件:IMU PCB 设计和 MEMS 组装指南.pdf
2025-01-06 19:09:445119 
ER-FIMU-60低成本高精度光纤陀螺IMU(替代LN200)。它由全固态三轴光纤陀螺和三轴石英挠性加速度计、机身结构、数据接口板等部件组成
2025-01-06 13:57:11
近日,工业和信息化部第二届能源电子产业创新大赛太阳能光伏赛道决赛在山东临沂隆重举行。天合光能全回收再生光伏组件在众多参数作品中脱颖而出,荣获光伏组件回收专题赛一等奖,也是该专题的最高奖项。
2025-01-06 11:07:26890
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论