 为什么高端无人机不会在IMU精度上妥协?
为什么高端无人机不会在IMU精度上妥协?

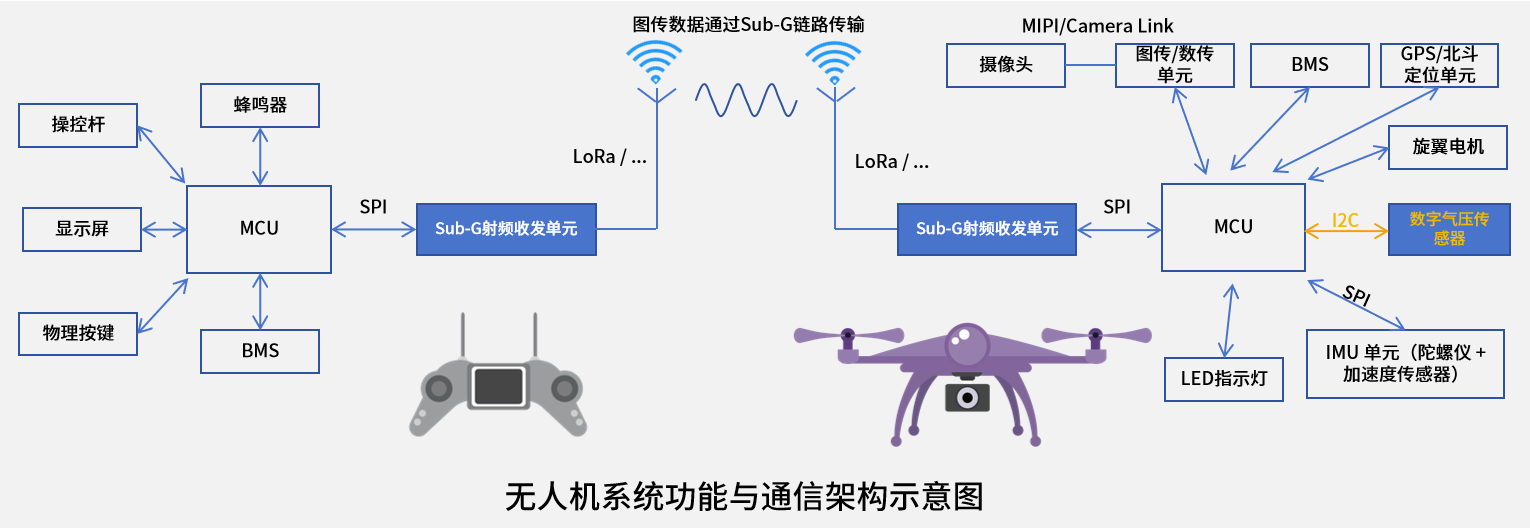
姿态控制精度与系统集成度现已成为制约无人机性能提升的关键瓶颈。无人机通过IMU集成的陀螺仪与加速度计,实现对三维空间姿态(角速度、加速度)数据的实时测量,数据传递至飞控系统,能得到无人机的姿态、速度、位移等信息,无人机稳定飞行的核心依赖于IMU的精度与可靠性。
ER-MIMU-063 MEMS IMU打破了传统惯性测量器件在体积与性能间的权衡困境,内部集成陀螺仪,加速度计,磁力计,为无人机飞控系统提供了兼具高精度运动感知与极致集成化的解决方案。
极致微型化与轻量化设计
采用最新的MEMS陀螺技术,尺寸缩减至38.6mm×44.8mm×25.5mm,重量≤70g。紧凑结构便于集成至狭小的载荷舱或飞控系统中,适配多类型机型。轻量化可直接降低机身负载,优化续航能力。
高精度运动感知性能
陀螺仪测量范围为±400º/s,零偏不稳定性 < 0.1°/h,角随机游走<0.05°/√h,在长航时任务中,陀螺仪输出偏差小,显著延缓惯性导航系统的误差累积,确保姿态解算平滑稳定,减少微小抖动的干扰。
加速度计测量范围为±30g,零偏重复性100μg,零偏稳定性<50μg,为速度推算和位置积分提供坚实基础。
ER-MIMU-063 是九轴IMU,测量的数据实时反馈,让无人机能依据指令,做出平稳飞行、精准悬停、灵活转向等动作。可以让飞控系统实时监测无人机的俯仰、横滚及航向。
成本优势:在保证高性能的同时,价格比STIM300 更低。对于无人机制造商和广大爱好者来说,这意味着更低的生产成本和使用门槛。
姿态稳定
当无人机遭遇阵风干扰时,IMU可立即检测到姿态偏移(如滚转角度突变),并将数据传输至飞控系统,驱动电机调整力矩,实现快速姿态恢复。
当无人机发生碰撞、电机失效等故障时,IMU 可通过突变特征快速识别异常,触发应急降落程序。
辅助导航与定位
当无人机进入隧道、城市峡谷等GNSS 信号弱区时,IMU可以在非常短的时间内提供相对精确的导航信息,避免飞行失控。
ER-MIMU-063 以微型化、高精度、高可靠性的技术特性,成为无人机飞控系统的 “神经中枢”。其不仅满足无人机的航拍稳像需求,更在工业级无人机的自主导航、精准作业中发挥关键作用。
审核编辑 黄宇
-
无人机
+关注
关注
237文章
11365浏览量
196622 -
IMU
+关注
关注
6文章
427浏览量
48094
发布评论请先 登录
高性能MEMS IMU:重构无人机飞行控制核心
纳雷科技推出无人机雷达高精度旋转平台
小型激光测距模块2000米精度1米无人机光电吊舱专用

离轴技术:赋能无人机精准配送的核心芯片应用
微型化IMU如何突破无人机与机器人的性能边界?
IMU的精度对无人机姿态控制意味着什么?
为什么IMU是无人机稳定控制的的核心?
MEMS IMU如何赋能无人机与机器人精准感知?
IMU 能为无人机提供什么数据?
适用于无人机的 IMU 有哪些要求?

爱普生M-G370PDS惯性测量单元在无人机导航中的应用




评论