 什么是 GNSS 杠杆臂,它在 GNSS/INS 传感器融合算法中起什么作用?
什么是 GNSS 杠杆臂,它在 GNSS/INS 传感器融合算法中起什么作用?

随着 MTi-8和MTi-680(G) RTK GNSS/INS 的发布,Xsens 还引入了一个新的配置参数,称为 GNSS 杠杆臂(Level Arm)。 GNSS 杠杆臂是获得可靠的厘米级位置、速度和方向数据的基本参数。除了数据表中提供的信息外,本文还对 GNSS 杠杆臂进行了更深入的分析。
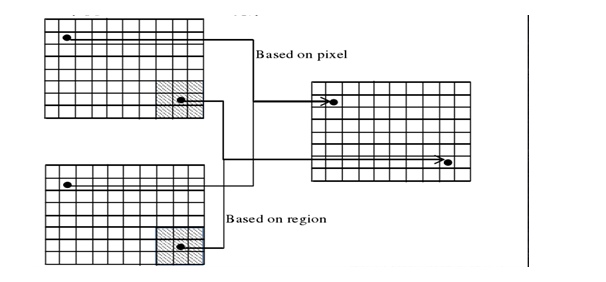
GNSS 杠杆臂设置考虑了 MTi(测量惯性数据的位置)与 GNSS 接收器天线位置之间的相对位置。将此信息提供给 MTi 将使传感器融合算法库能够补偿这两个测量位置之间的动态差异。下图可视化了这些动态差异::

如图所示,MTi 位于系统的旋转中心,例如汽车、机器人或无人机。 GNSS 天线安装在同一车辆上,它与MTi的距离, 远大于 GNSS 接收器的测量精度。当车辆旋转时,MTi 保持在相同的全局位置并且只经历一次旋转。相反,GNSS 天线除了旋转外还经历线性位移。
向 MTi 提供此杠杆臂信息有两个主要原因:
知道这个确切的偏移量允许 MTi 的传感器融合算法库转换 GNSS 接收器数据,使其与惯性测量数据的动态相匹配。不正确的杠杆臂设置可能导致未定义的状态估计,进而导致传感器融合算法的性能下降,例如位置、速度和方向的错误估计。以上图为例,它可以造成这样的情况:MTi 根据 GNSS 数据“认为”车辆正在移动,而实际上它只是围绕其轴旋转。
将从 MTi 生成的位置输出数据中减去杠杆臂。因此,位置数据将指示 MTi 的位置,而不是 GNSS 天线的位置。
GNSS接收器的定位精度与GNSS杠杆臂有什么关系?
对这个问题的简短回答是,随着 GNSS 测量精度的提高,GNSS 杠杆臂变得更加重要。再次考虑上一段中用于可视化 GNSS 杠杆臂的图像。三个测量之间的位移(“路径”)由 GNSS 接收器清楚地确定,因为它具有足够的测量精度。现在考虑相同的实验,但使用测量精度仅为 1 米(而不是 1 厘米)的 GNSS 接收器。三个连续的测量结果不够准确,无法确定 GNSS 天线的路径。基于三个测量和有限的测量精度,我们甚至不能肯定地说天线已经移动了。在这种情况下,GNSS 杠杆臂不会发挥重要作用,并且被 MTi 忽略。
GNSS 杠杆臂的重要性不仅取决于 GNSS 测量的准确性; GNSS 杠杆臂的长度也有影响。考虑一艘大型海上船只,其船体中心安装了 MTi-G-710,天线安装在 MTi 上方 10 米的桅杆顶部。如果船舶经历强烈的横滚和俯仰动态,那么安装在桅杆上的天线将经历线性位移,即使使用精度较低的 GNSS 接收器也可以观察到。在这种情况下,向融合算法库提供 GNSS 杠杆臂信息可以提高 MTi 的性能。
目前,MTi-8和MTi-680(G) 是 MTi 产品组合中支持这种杠杆臂设置的产品,因为它的位置数据精确到厘米。 MTi-7、MTi-670 和 MTi-G-710 的传感器融合算法假定 GNSS 天线的位置与 MTi 本身大致相同。
如何测量和保存 GNSS 杠杆臂?
GNSS 杠杆臂是用户在安装 MTi 后需要测量和保存的参数。它作为 X-Y-Z 坐标向量存储在 MTi 的内存中,相对于 MTi 传感器坐标系的原点*。单位是米,但如果可能,应以厘米级精度确定杠杆臂。
注意:GNSS 杠杆臂的默认值为 [0, 0, 0] (m)。这意味着默认情况下,MTi 假定 MTi 及其 GNSS 天线位于同一位置!
下图显示了在 MTi 及其 GNSS 天线集成到汽车后如何测量 GNSS 杠杆臂的示例。 X-Y-Z 坐标应根据传感器坐标系测量,该坐标系已印在 MTi 侧面标签上。 需要注意坐标的符号:如果天线安装在 MTi 的右侧,则 Y 坐标应为负值。
该车辆的最终 GNSS 杠杆臂矢量为 [1.00, 0.50, 0.80] (m)。

可以使用 MT Manager中的设备设置(Device Settings)窗口或使用 setGnssLeverArm 低级通信命令设置和保存 GNSS 杠杆臂。
如果 MTi-8或MTi-680(G) 未与被跟踪的物体对齐,可以应用传感器对齐矩阵 (RotSensor) 来弥补这一点,请注意仍应根据原始传感器坐标系(印在 MTi 的侧面标签上)输入 GNSS 杠杆臂 。 GNSS 杠杆臂不受 RotSensor 矩阵的影响。
*可以在产品的数据表中找到 MTi 原点的确切位置。
不正确使用GNSS 杠杆臂的结果
GNSS 杠杆臂被认为是静态偏移,这意味着 MTi 的传感器融合算法假设相对距离(相对于 MTi 的传感器坐标系)不随时间变化。 向 MTi 提供不正确的杠杆臂参数,可能会导致 MTi 的位置、速度和方向数据输出性能下降。
当 MTi 及其 GNSS 天线安装在灵活(非刚性)的车辆或物体上时,可能会在一定程度上违背 GNSS 杠杆臂的工作原理。 在桌面测试期间也经常发生不正确的使用行为:例如,出于测试目的,将 MTi 连接到 PC 并将 GNSS 天线留在窗户附近以实现 GNSS 固定解。 如果 MTi 本身移动或旋转,GNSS 杠杆臂的工作原理将受到违背。

MTi-680G还配备了升级的配套软件,与非RTK模块相比,该软件能够显著提升模块的内部信号处理速度。通过将全球定位坐标与模块的姿态、航向和速度输出同步,MTi-680G可为任何载体设备提供多方位的定位和导航输出,包括以最大输出数据速率400Hz高速移动的无人机等设备。
这款支持RTK的模块还提供以下功能:
对每个产品设备进行精确出厂校准
强大的抗磁干扰能力
自适应软件运行,可在各类应用场景中优化性能
易于使用的免费MT Software Suite开发工具,便于加快集成到最终产品设计中的速度
Xsens的热门MTi开发工具包,提供开箱即用的操作体验
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2578文章
55894浏览量
795825 -
算法
+关注
关注
23文章
4817浏览量
98884 -
GNSS
+关注
关注
9文章
1037浏览量
51548
发布评论请先 登录
相关推荐
热点推荐
传感器数据融合算法python代码
传感器数据融合算法是一种将多个传感器收集到的数据合并到一个一致和准确的表示中的技术。这种算法的目的是提高数据精确性和可靠性,从而增强对环境或
【TL6748 DSP申请】基于TMS320C6748的传感器数据融合算法实现
申请理由:之前有使用过TI的DSP处理器,现在正好有个项目,准备采用TI的C6000系列DSP用于传感器数据融合算法的实现。希望能够通过申请,谢谢。项目描述:由于工业机器人的重复定位精度和绝对定位
发表于 09-10 11:13
姿态融合算法是什么
作者:Joy Yang1.什么是姿态融合算法简单来说,姿态融合算法就是融合多种运动传感器数据(一般需要3轴加速度, 3轴陀螺仪或者3轴地磁感应传感器
发表于 07-19 06:47
何为多传感器融合算法?常用的融合算法包括哪些
因为多传感器的使用会产生大量需要处理的数据,因此通常通过融合算法来对数据进行优化。不同传感器采集到的信息可能相互之间可能会不同甚至是有矛盾,使用融合算法可以帮我们弄懂如何保证系统能够准
XSENS配备全新GNSS/INS模块的新款坚固型MTi-670G
Xsens的MTi-670G是MTi600系列中配备了GNSS/INS的一款产品,能把IMU、VRU和AHRS提供的所有数据与定位数据相结合。GNSS/

多传感器数据融合算法最关键的是
多传感器数据融合是一个综合处理多传感器数据的过程,以提高对环境或目标的感知和解释能力。在这个过程中,各种数据融合算法起着至关重要的
GNSS信号不稳定?测绘级GNSS+INS组合导航,一键解决难题
GNSS卫星刷新率低且信号容易受到遮挡或中断,导致GNSS信号失锁。GNSS+INS的组合导航系统可以弥补这些问题,且高精度的INS可以在GNSS
测绘级实力!GNSS+INS 重塑导航精度
传感器,即使在 GNSS 信号减弱时也能提供不间断的位置、姿态和速度数据。GNSS 与 INS 相结合,为那些对精度和连续性有严格要求的行业提供了一个无缝且可靠的解决方案。
革新精准导航:全球最精确的 GNSS/MEMS INS 系统
在关键任务中遇到GNSS信号不稳定或信号中断的问题?**ER-GNSS/MINS-01** 来了——这是一款测绘级超高精度组合导航系统,结合了GNSS + MEMS
Xsens MTi AHRS 和 GNSS/INS汽车应用的最佳实践
XsensMTiAHRS和GNSS/INS产品用于各种汽车应用,例如自动驾驶汽车、卡车、穿梭巴士和火车。XsensMTiGNSS/INS旨在使用融合的IMU和




评论