 压电纳米旋转台用于高精度IMU的出厂标定
压电纳米旋转台用于高精度IMU的出厂标定

在无人机精准悬停、自动驾驶汽车平稳过弯的背后,有一颗至关重要的核心处理器 - 惯性测量单元(IMU)。它的精度,直接决定了智能设备感知自身姿态的准确度。一颗高精度的IMU,其卓越性能离不开生产环节中最关键的一道工序:出厂标定。当IMU标定需求迈入微弧度时代,压电纳米旋转台凭借独特技术优势,成为标定场景的理想搭档。
(注:图片源于网络)
一、IMU标定为何是出厂“必修课”?
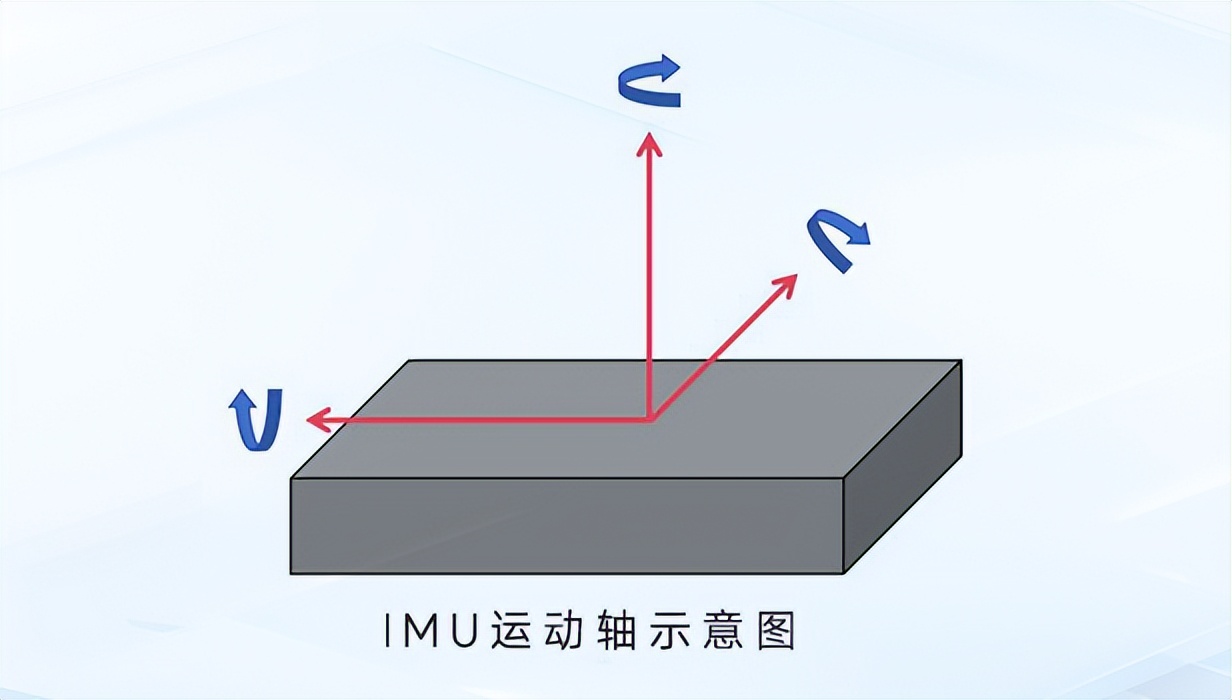
惯性测量单元(Inertial Measurement Unit)是一种用于测量物体运动状态的传感器装置。IMU通常由加速度计和陀螺仪组成,加速度计用于测量物体在三个正交方向上的线性加速度。陀螺仪则用于测量物体绕三个正交轴的角速度。通过对这些加速度和角速度数据的处理,IMU可以解算出物体的姿态、速度和位置等信息。
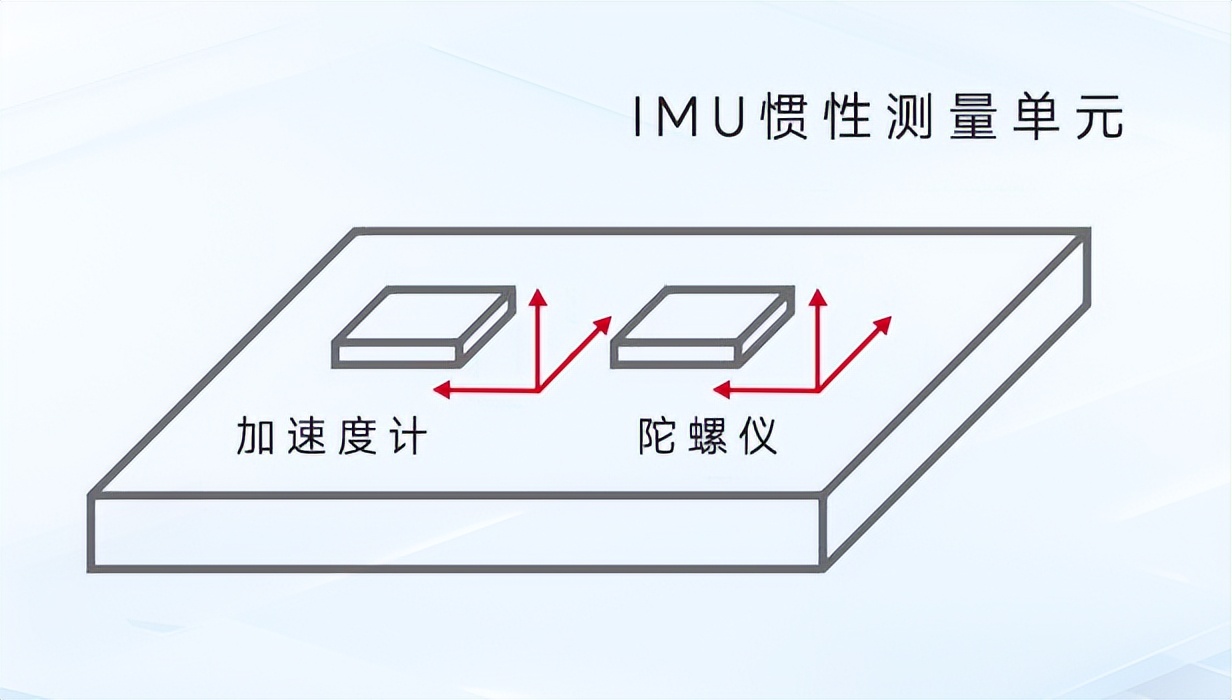
IMU具有更新频率高、短时间内推算精度高的特点,它不依赖外部信号,能够在室内、地下、水下等GPS信号受限的环境中独立工作,因此在航空航天、无人机、自动驾驶汽车、机器人、智能穿戴等众多领域都有广泛应用。
(注:图片源于网络)
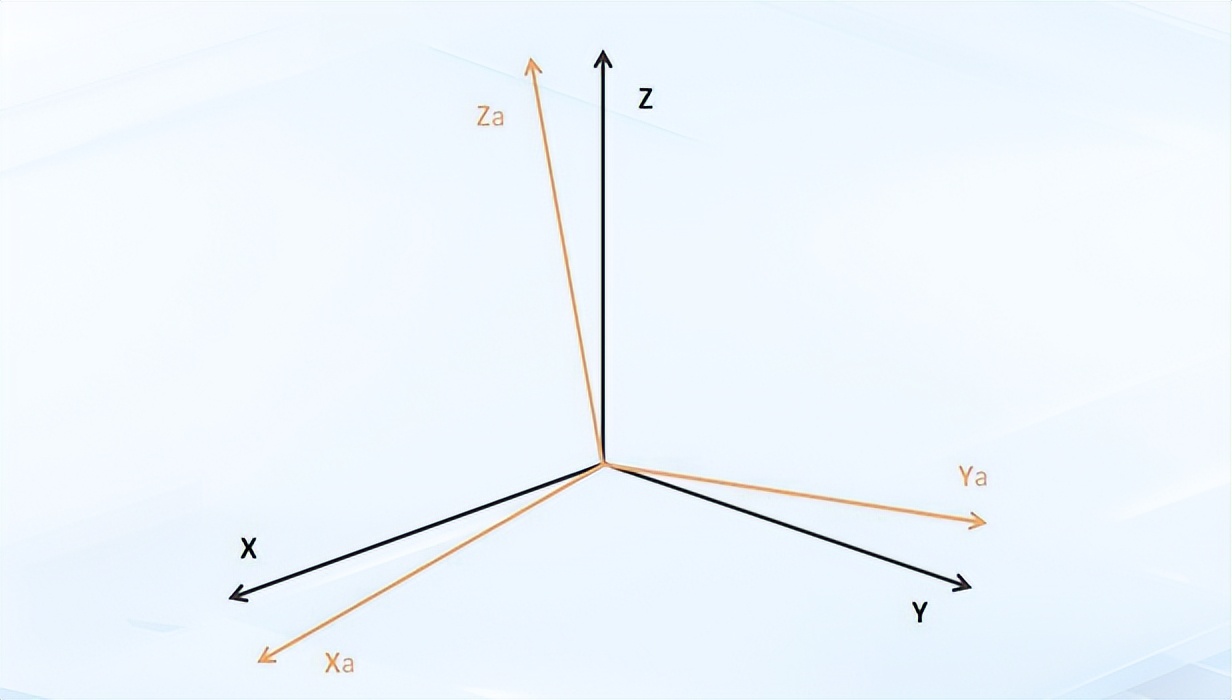
IMU内部集成的加速度计和陀螺仪,分别测量线加速度与角速度,受一些因素影响,在实际输出数据时,都会存在微小的偏差:可能是安装时带来的误差,可能是标度因子非线性误差,也可能是轴间不对准造成测量方向偏差。而标定的本质,就是通过精准测试建立误差模型,将这些系统性误差进行补偿修正,从而确保IMU输出数据更接近真实运动。
误差模型示意图
加速度计通常依赖重力常量标定:重力矢量方向固定,通过将IMU以不同姿态放置,并采集各个位置状态下加速度计的输出数值,对比理论值与实测值的偏差,即可推算出加速度计的零偏和标度因子等误差,完成加速度计标定。
动态标定则是在IMU处于运动状态下进行的标定,常用旋转平台或摆动台来进行校准。IMU动态标定的原理,是明确输入值,观测输出值来进行对比。为IMU提供一个已知、恒定且精确的物理量(如特定角度、角速度),利用稳定的常量角速度,结合转台提供的角速度输入,通过改变IMU姿态,分析传感器输出差异,推算出所有误差参数模型,从而修正动态测量误差。
二、高精度IMU标定对设备提出何种要求?
IMU出厂标定并不是简单的旋转测试,而是对设备、流程的系统性考验,它的核心要求集中在以下几个方面:
1.姿态控制:精度必须匹配上IMU的测量能力
传感器精度已向更精密的级别进阶,所以标定设备需实现微弧度级的姿态调整。传统转台易受机械间隙、摩擦影响,难以满足高端IMU对安装误差、标度因数的校准需求。
2.动态响应:能模拟复杂运动状态
标定不仅要测静态误差,还需通过动态角速度测试验证传感器性能。这要求转台能快速切换姿态,且运动过程稳定无抖动,避免引入额外误差。
3.环境适配:扛住全温范围测试
IMU需在一些极端环境下稳定工作时,标定也需同步开展全温测试。设备需体积紧凑,且自身不受温度变化影响。
三、压电纳米旋转台如何成为IMU标定的理想基座
压电纳米旋转台基于压电陶瓷的逆压电效应驱动,输入电压从而引起材料产生纳米级形变。它具有的纳米级分辨率、无摩擦以及超快响应速度,完美地满足了IMU标定的需求。
1.极高的角度分辨率
压电纳米旋转台能够产生并稳定在极其微小的角度步进(例如微弧度级别),以精确标定传感器的非线性误差等。
2.超平稳的动态标定
压电驱动具有毫秒级的响应速度和无磁、无摩擦的优势。这使得旋转台可以进行极其平滑、无抖动的低速转动和扫描,是测试传感器的理想输入源。它能帮助更清晰地分离出IMU的动态误差,从而进行针对性补偿。
3.实现多自由度精密对准
通过将多个压电产品例如压电纳米旋转台和压电纳米定位台组合成多轴系统,可以构建一个多自由度的精密运动平台,可快速且精准地将IMU调整至标定流程所需的任何一个理论姿态。其极高重复定位精度,确保了每次标定的一致性,从根源上保证了出厂IMU产品性能的均一性与可靠性。
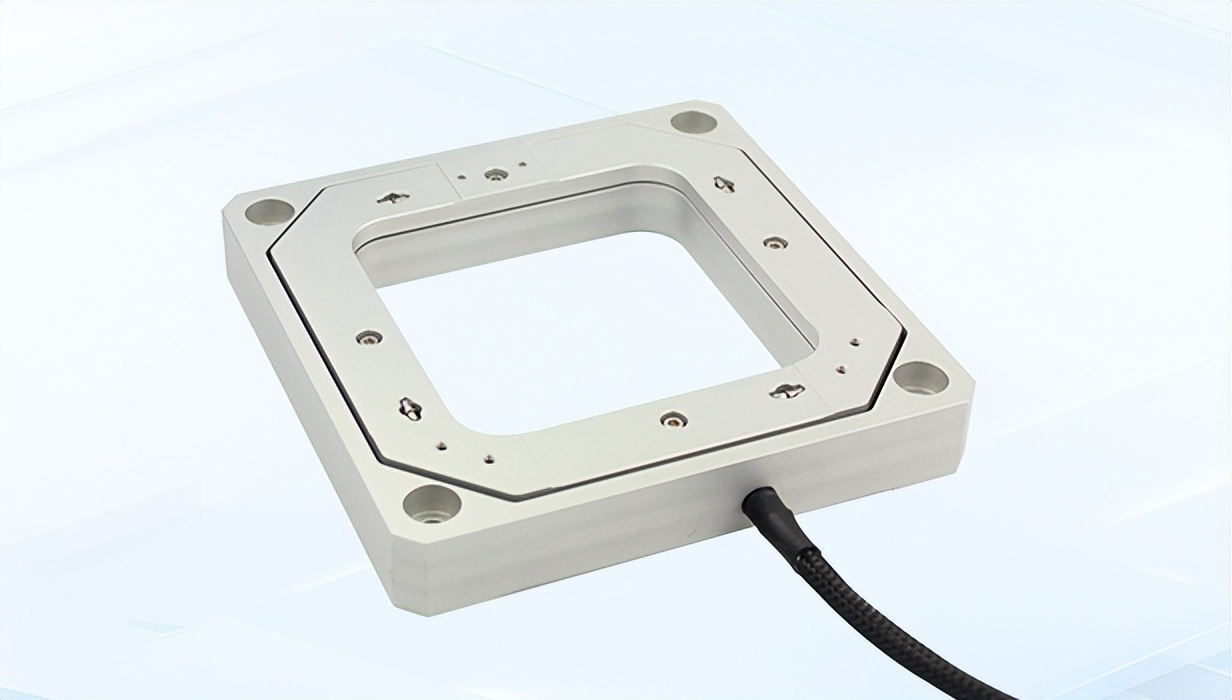
S54.T2系列压电偏摆台
S54.T2系列是具有中心通孔的二维θxθy轴压电偏摆台,采用无摩擦柔性铰链结构设计,响应速度快、闭环定位精度高,80×80mm中心通孔使其易于集成在显微及扫描等光学系统中。
特点
·θx、θy偏摆运动
·开环/闭环可供选择
·80×80mm大通孔
·分辨率高
·外形超薄
·适于加速度/角速度传感器标定
技术参数
| 型号 | S54.T2S/K |
| 运动自由度 | θx,θy |
| 驱动控制 | 3路驱动,2路传感/3路驱动 |
| 标称偏转角度范围(0~120V) | ±0.8mrad(≈±165秒)/轴 |
| Max.偏转角度范围(0~150V) | ±1mrad(≈±200秒)/轴 |
| 传感器类型 | SGS/- |
| 偏摆分辨率 | 0.07µrad/0.002µrad |
| 闭环线性度 | 0.2%F.S./- |
| 闭环重复定位精度 | 0.1%F.S./- |
| 推/拉力 | 40N/8N |
| 运动方向刚度 | 0.5N/µm |
| 空载谐振频率 | θx450Hz/θy400Hz |
| 空载阶跃时间 | 20ms/3.5ms |
| 闭环工作频率(-3dB) | 110Hz(空载) |
| 承载能力 | 1kg |
| 静电容量 | 3.6μF/轴 |
| 材质 | 钢、铝 |
| 外形尺寸(长×宽×高) | 125mm×125mm×20mm |
| 通光孔尺寸(长×宽) | 80mm×80mm,4×R10** |
| 重量 | 510g |
**代表通光孔4个角弧形半径为10mm。
S21.R3S/K压电旋转台
S21.R3S/K压电旋转台是一维θz运动的压电纳米定位台,它的外形结构紧凑,非常易于集成。
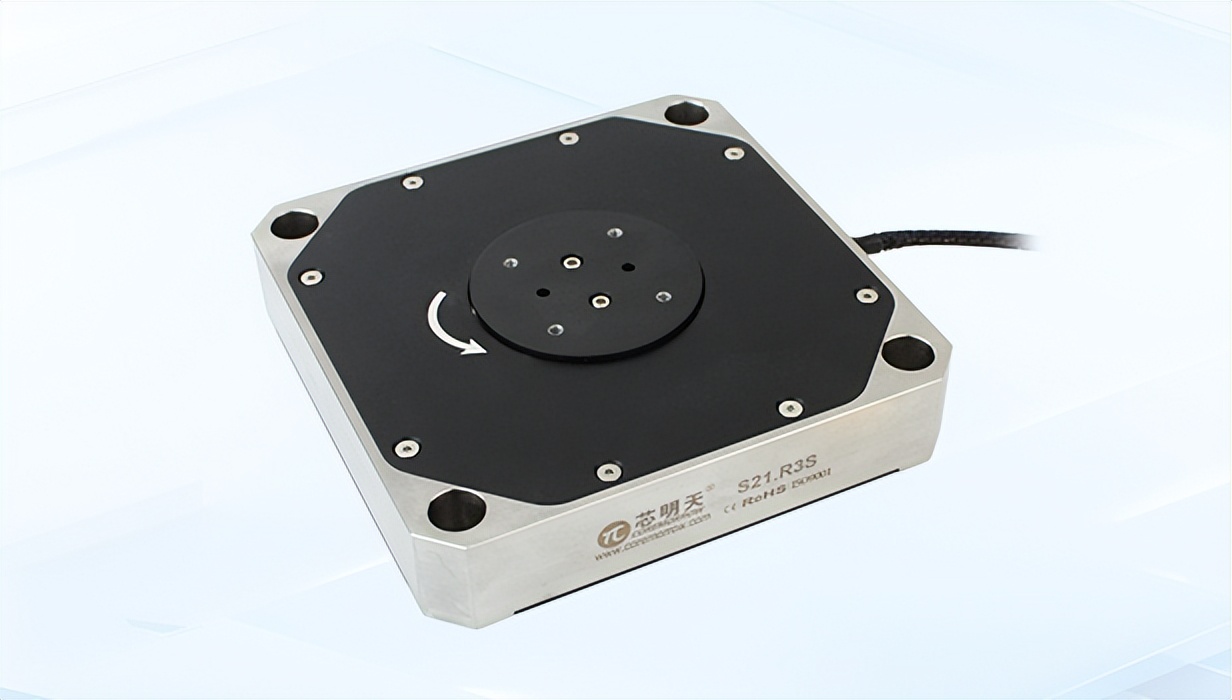
特点
·θz旋转
·旋转角度3mrad
·闭环定位精度高
·响应速度快
·体积小巧
技术参数
| 型号 | S21.R3S/K |
| 运动自由度 | θz |
| 传感器类型 | SGS/- |
| 驱动控制 | 1路驱动,1路传感/1路驱动 |
| 标称行程范围(0~120V) | 2.4mrad |
| Max.行程范围(0~150V) | 3mrad |
| 分辨率 | 0.1μrad/0.003μrad |
| 闭环线性度 | 0.3%F.S./- |
| 闭环重复定位精度 | 0.1%F.S./- |
| 空载谐振频率 | 700Hz |
| 带载0.5kg谐振频率 | 120Hz |
| 承载能力 | 0.5kg |
| 静电容量 | 5.4μF |
| 材质 | 钢、铝 |
| 重量(不含线) | 1635g |
审核编辑 黄宇
-
压电
+关注
关注
1文章
107浏览量
14567 -
IMU
+关注
关注
6文章
438浏览量
48194
发布评论请先 登录
芯明天P63.X压电纳米定位台应用于微型FP腔实现精准控制

M-G366PDG IMU模组高精度惯性测量单元抗振性能优异

太阳敏感器的高精度补偿标定方法


IMU+多相机高速联合自动标定方案
芯明天压电纳米定位台:助力六方氮化硼单光子源研究
毫米行程柔性驱动压电纳米定位台:超大行程,纳米级精度

压电纳米技术如何升级进化光纤开关
高精度压电纳米位移台:AFM显微镜的精密导航系统

使用高精度IMU对无人机系统有何提升?
寻北级别精度的MEMS IMU
压电纳米定位系统如何重塑纳米压印精度边界
压电纳米定位系统搭档金刚石色心-在纳米尺度上捕捉量子世界的奥秘



评论