 电子发烧友App
电子发烧友App



许多人对伺服电机控制器的原理一直不理解,不知道它是如何控制的。事实上看相关介绍也可以知道看起来特别简单,真正了解就知道不是这么回事。以下小编介绍其中的原理。
常用的伺服控制系统软件是闭环控制系统,给伺服控制机推送不同的单脉冲版完成不同速权部位的控制。通常采用单脉冲和模拟量输入控制,有速率PID,转距PID,伺服还具有意见反馈,将对意见反馈数据和输出数据信号进行处理,非常好的闭换控制。
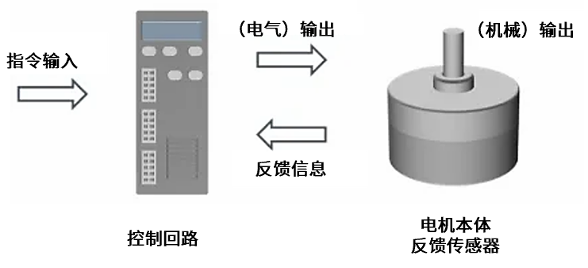
闭环控制系统软件,又称意见反馈控制系统软件,是一种自动控制系统软件,由数据信号顺向通道和意见反馈通道构成。这是一种全自动控制系统软件,其中包括功率放大电路和意见反馈,使得输出的变量值响应于输入自变量的值。随动控制机是现代健身运动控制的关键组成部分,广泛应用于工业机械手、数控车床加工中心和其他自动化机械。特别是应用于交流稀土永磁同步电机控制的伺服控制机,早已成为国内外科研网络的热点。在现代交流交流伺服控制机设计方案中,广泛选择了基于矢量素材控制的电流量、速率、闭环控制优化算法。在最优算法中,闭环控制设计方案是否有效,对充分发挥伺服控制系统软件,特别是速率控制特性起着主导作用。
伺服控制,即是考虑某类目地,对造成的健身运动和对物体的运动开展控制的人类活动。说白了伺服控制对于物件健身运动的部位、速率及瞬时速度等变化量的合理控制。这类控制已在各行业获得普及化。伺服控制系统软件则指的是用于精准地追随或重现某一全过程的意见反馈控制系统软件。普通伺服有三种控制方式:速率控制法、转距控制法、位置控制法。
一般的伺服控制器为单脉冲和模拟量输入控制,有速率 PID。转距 PID,伺服还具有意见反馈,会对意见反馈数据信号和输出数据信号进行比较,很好闭换控制,精度高。闭环控制系统软件通常被用来模拟模拟控制,而单脉冲控制通常用于闭环控制系统软件,或者说伺服控制系统软件,伺服控制机就是用来控制伺服系统软件的。
位置控制广泛应用于各种精确定位的场所,能立即更换各种步进电机的驱动装置。通常情况下伺服是根据接收单脉冲进行部位控制的,单脉冲的数目决定了单脉冲量,频率决定了单脉冲量。机械系统和电子装置的传动机构是单脉冲相匹配的局部剂量。
fqj











































 工商网监
工商网监
评论