 HPM6E80高压伺服EtherCAT驱动器方案
HPM6E80高压伺服EtherCAT驱动器方案

本文导读
求远电子基于先楫半导体HPM6E80推出的HPM6E00_EtherCAT_MDR高压伺服EtherCAT从站驱动器方案,提供完善的软硬件参考,可极大的降低产品开发难度,缩短产品上市时间。
HPM6E00_EtherCAT_MDR高压伺服EtherCAT从站驱动器
总线型伺服驱动器是一种用于控制伺服电机的设备,它通过总线通信协议(如CANopen、EtherCAT等)与上位机或控制系统相连,实现高效、精准的数据传输与控制指令下达,能同时控制多个伺服电机协同工作,在自动化生产线、数控机床、机器人等领域应用广泛,具备高速响应、高精度定位、灵活组网等优点。 HPM6E00_EtherCAT_MDR是求远电子基于HPM6E80精心推出的一套高压伺服EtherCAT从站驱动器方案。依托EtherCAT通信技术,作为从站与主站进行高效的数据交互,接收主站下达的各类控制指令,像位置控制指令、速度调节指令以及力矩设定指令等。在高压环境下,其凭借出色的性能,精准驱动高压伺服电机运转,确保电机在高电压工况下依然能实现稳定且精确的位置控制、速度跟随以及力矩输出,为众多对精度和动力要求较高的工业应用场景,比如大型数控机床、重型自动化生产线等,提供可靠的动力支持与精准的控制保障。该控制器具有两端口的EtherCAT从站输入输出,支持EtherCAT CIA402协议,支持多种编码器、通讯接口及控制接口。该方案完成度高,用户可快速评估功能,极大的降低产品开发难度,缩短产品上市时间。
驱动器特点
➢输入:AC 200-240V 4.0A 50/60Hz
➢输出:AC 0-240V 2.8A 0-500Hz 400W
➢600M双核RISC-V处理器提供澎湃动力
➢支持两端口的的EtherCAT从站输入输出
➢支持EtherCATCIA402协议
➢支持支持多摩川绝对值编码器以及增量式编码器
➢支持两路隔离CANFD、两路隔离RS-485、两路RS-232
➢支持8路隔离DI、8路隔离DO
➢内带调试器,可直接通过外部USB口进行软件调试、下载及串口通信

图2 接口说明图
整体控制流程
在本方案中,伺服电机采用了先进的FOC三环控制方式,这其中涵盖了极为关键的电流环、速度环以及位置环。通过这三环的协同配合,使得电机可以达成对位置、速度以及力矩的精确控制,从而在各种应用场景中都展现出卓越的性能。与此同时,本方案借助三路sigma-Delta ADC来采集三相电流,它能够以高精度、高频率的方式捕捉电流数据,为后续的控制调节提供可靠依据。而且,还运用编码器来采集位置信息,并将其作为反馈内容,通过这样的反馈机制,电机可以实时根据实际情况进行调整,进而真正实现精确的位置控制,让整个系统运行得更加稳定、高效且精准。
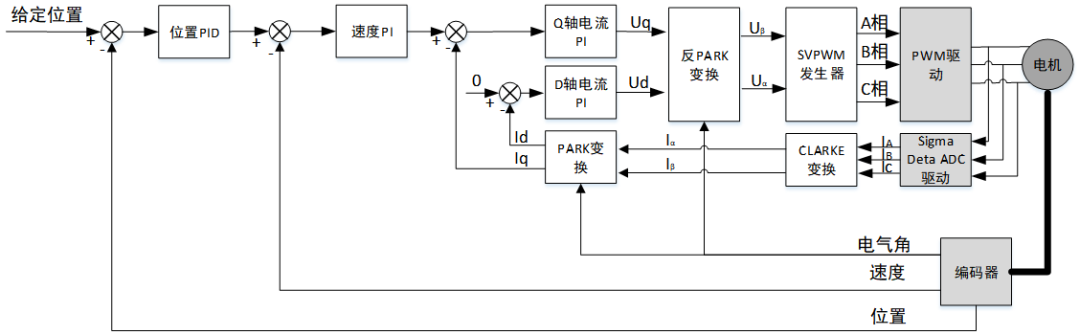
图3 控制流程
HPM6E00系列处理器介绍
HPM6E00系列MCU是上海先楫推出的一款高性能、高实时以太互联,双RISC-V内核的微控制器。HPM6E00系列提供多达4端口千兆以太交换机,支持时间敏感网络(TSN: Time-Sensitive Networking),并且支持EtherCAT从站控制器(ESC:EtherCAT Slave Controller),以及32路高分辨率PWM输出,Σ∆数字滤波,高精度运动控制系统,可以在工业自动化领域实现基于高实时性低延时以太网的高性能伺服电机控制、机器人运动控制等应用。
处理器优势特点
➢高性能双核RISC-V处理器,主频高达600MHz; ➢片内最大支持2MB SRAM; ➢支持4端口千兆以太网交换机,且支持TSN协议; ➢支持3端口的EtherCAT从站控制器; ➢支持4个高分辨率PWM模块(32通道),调制精度高达100ps; ➢支持4个编码器接口,支持脉冲式与绝对值式位置传感器,2个旋变解码器; ➢支持运动管理控制器、坐标变换器和环路计算器以及可编程逻辑模块PLB; ➢支持4个高性能ADC,16位/2MSPS(或12位/4MSPS),最大32路模拟输入引脚; ➢支持2个Σ∆数字滤波SDM;
➢支持8路CANFD等众多通讯接口。
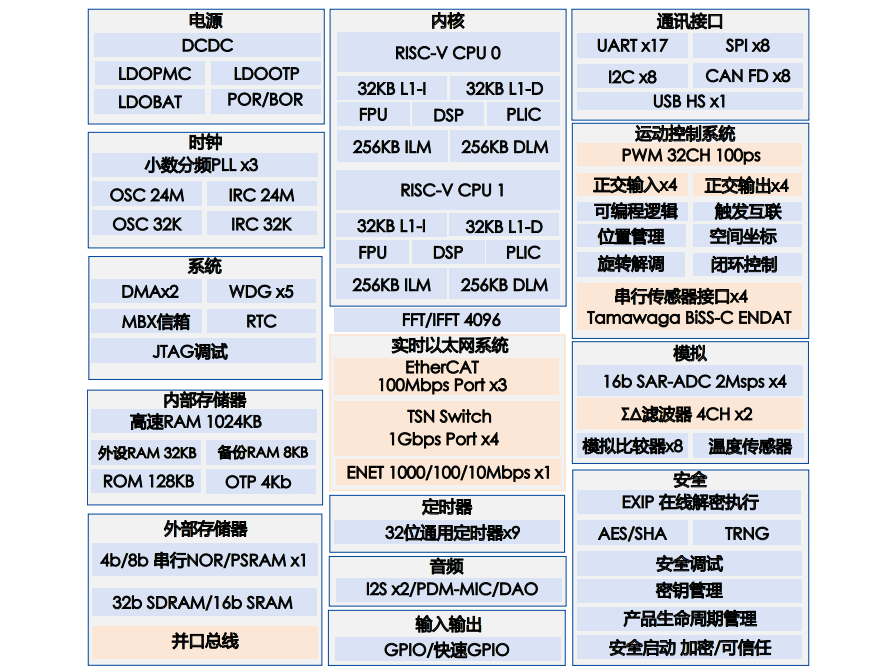
图5 HPM6E00芯片资源框图
-
驱动器
+关注
关注
54文章
9012浏览量
153287 -
伺服
+关注
关注
17文章
684浏览量
42796 -
ethercat
+关注
关注
19文章
1373浏览量
43281
原文标题:上新 | HPM6E80高压伺服EtherCAT驱动器方案
文章出处:【微信号:立功科技,微信公众号:立功科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
HPM6E00EVKRevC开发板32位RISC-V架构
EtherCAT主站转Profinet网关与禾川伺服驱动器X4E快速通讯案例

EtherCAT主站转Profinet网关接禾川伺服驱动器X5E快速配置案例

EtherCAT主站转Profinet网关接IS620N伺服驱动器与西门子plc通讯案例
【强势上新】HPM5E00:EtherCAT运动控制MCU,先楫半导体再拓工业总线产品新版图

【强势上新】HPM5E00:EtherCAT运动控制MCU,先楫半导体再拓工业总线产品新版图

hpm6e80 sdram引脚确认
HPM6E80 cherryusb_winusb10例程速度测试
EtherCAT科普系列(3): EtherCAT技术在伺服驱动器领域的应用

先辑半导体HPM6E00系列产品能用来做EtherCAT的主站吗
HPM6E80芯片异常
伺服驱动器的性质定义
hpm_apps v1.8.0上线:HPM6200四轴伺服驱控方案重磅发布!
高效驱动开启精密控制时代│先楫HPM6E00伺服驱动器方案
上新 | HPM6E80高压伺服EtherCAT驱动器方案





 工商网监
工商网监
评论