 恩智浦MCU方案 单颗i.MX RT1180实现EtherCAT+伺服控制
恩智浦MCU方案 单颗i.MX RT1180实现EtherCAT+伺服控制

硬件平台简介
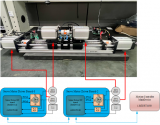
文接上篇,本篇继续介绍基于单颗i.MX RT1180芯片的EtherCAT+伺服电机控制方案-伺服控制板硬件电路资源介绍,即为下图中的Servo Motor Driver Board。
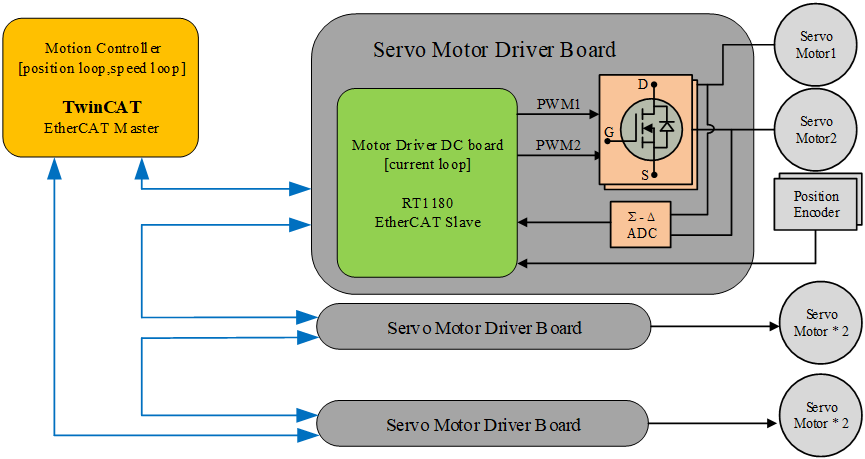
参考设计的硬件平台基于i.MX RT1180为主控芯片设计的,主要分为两个部分:
控制子卡,XSERVO-MTR-DC
功率板XSERVO-MTR-PSG
以下分别简单概括两个板卡的功能介绍。
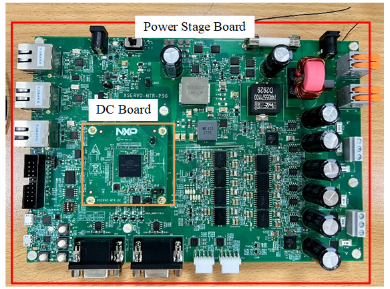
XSERVO-MTR-DC:
子卡功能是芯片的引脚引出到高速排插,以及芯片上电时序电路,SAR-ADC参考电平选择,Sinc-Filter参考时钟选择,芯片reset电路。子卡不存在电源电路,所有电源均来自功率板。
XSERVO-MTR-PSG
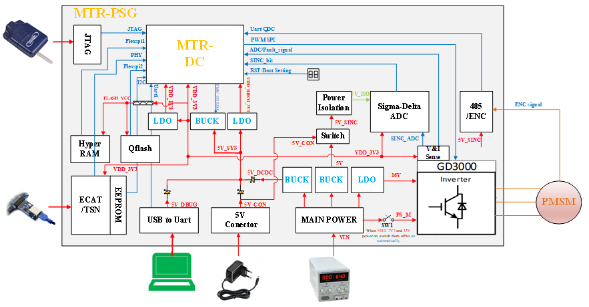
将该参考设计分为了两个硬件部分,是为了方便后续其他芯片对应的功能验证,只需重新设计子卡即可。功率板囊括了应用的绝大部分硬件功能,主要包括:功率、数字电源部分,高速网络接口部分,绝对式(485)、增量式编码器接口电路,串口、CAN接口电路,运放采样电路、Sigma-Delta ADC采样电路,电机驱动电路,LED,按钮电路,电机故障保护电路。
该参考设计应用到i.MX RT1180的主要功能如下图所示,并将与其连接的外围电路芯片型号标注其中。
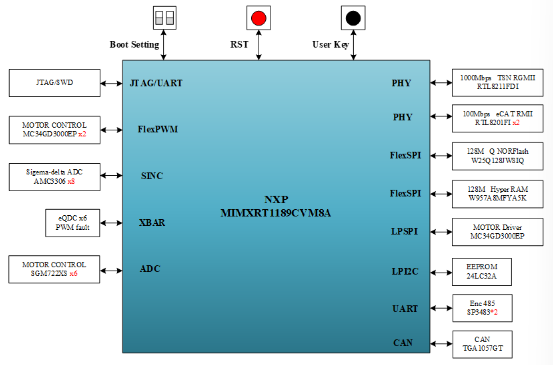
其中I2C连接的EEPROM用于EtherCAT使用。除了用于绝对式编码器读取信息的两组UART口,还连接了三个串口转USB方便用户调试,未在图中标出。
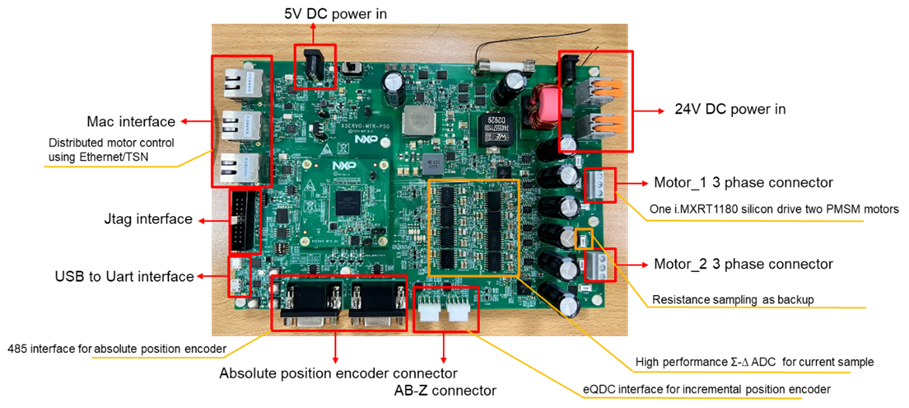
上图为实际板卡图片,标注出了对应各个部分的应用,与相关电源接口。该板有两个电源接口,分别是5V电源接口和24V电源接口,其中5V电源接口用于常规非电机控制等应用时调试,与此同时5V供电也可以通过USB接口进行供电。
需要注意的是24V供电和5V供电接口相同,需要自行进行区分。24V供电有两种方式,一种就是和5V供电相同的接口,另一种是卡线接口的方式。下面给出了整个板子的电源与外围电路的布局安排供用户更方便理解硬件。
通过本次介绍,相信大家已经对基于i.MX RT1180实现EtherCAT通信与伺服控制的整体方案有了初步的了解。
从双核架构的高性能处理,到原生支持工业以太网协议,再到在伺服控制中的精准响应,i.MX RT1180展现了其在工业自动化领域的强大潜力。它不仅是一颗芯片,更是一套集成度高、实时性强、安全性优的解决方案。
接下来,我们也欢迎大家进一步交流探讨,共同推动这项技术在更多实际场景中的落地应用!
恩智浦致力于打造安全的连接和基础设施解决方案,为智慧生活保驾护航。
-
mcu
+关注
关注
147文章
19128浏览量
403975 -
NXP
+关注
关注
61文章
1410浏览量
199241 -
恩智浦
+关注
关注
14文章
6122浏览量
154264 -
工业控制
+关注
关注
38文章
1697浏览量
92327 -
伺服控制
+关注
关注
5文章
161浏览量
25349 -
i.MX
+关注
关注
1文章
65浏览量
43150 -
ethercat
+关注
关注
20文章
1580浏览量
46138
原文标题:i.MX RT1180实现EtherCAT+伺服控制
文章出处:【微信号:NXP_SMART_HARDWARE,微信公众号:恩智浦MCU加油站】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
恩智浦全新i.MX 93W应用处理器重磅发布
探索i.MX RT1180:高性能处理器的技术剖析与应用指南
在恩智浦i.MX RT1180跨界处理器上如何实现1588协议同步

i.MX RT1180实现EtherCAT+伺服控制的终极实践
使用恩智浦i.MX RT700跨界MCU打造智能手表
恩智浦推出i.MX 952人工智能应用处理器
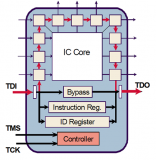
恩智浦i.MX RT1180 MCU如何进入Boundary Scan模式

RT1180 XMCD的特点和使用注意事项

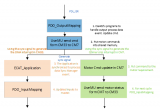
恩智浦i.MX RT1180跨界MCU驱动EtherCAT的工作流程
恩智浦i.MX RT1180跨界MCU助力下一代伺服控制系统
恩智浦i.MX RT1180跨界处理器如何选型

基于恩智浦i.MX RT1180芯片的EtherCAT+伺服电机控制方案

恩智浦i.MX 95系列MPU如何赋能边缘计算

如何实现安卓与恩智浦i.MX RT1170的无线投屏与控制




评论