 如何编程电机控制器
如何编程电机控制器

电机控制器是现代工业自动化和机器人技术中不可或缺的一部分。它们负责精确控制电机的速度、位置和力矩,以实现高效和精确的运动控制。
1. 硬件选择
在开始编程之前,首先需要选择合适的电机和驱动器。常见的电机类型包括直流电机、步进电机和伺服电机。每种电机都有其特定的应用场景和控制要求。
1.1 电机类型
- 直流电机 :适用于需要连续速度控制的应用。
- 步进电机 :适用于需要精确位置控制的应用。
- 伺服电机 :适用于需要高精度速度和位置控制的应用。
1.2 驱动器
电机驱动器负责将控制信号转换为电机可以理解的电压和电流。选择驱动器时,需要考虑其兼容性、输出电流和电压规格。
2. 软件架构
电机控制器的软件架构通常包括以下几个层次:
2.1 硬件抽象层(HAL)
硬件抽象层是软件与硬件之间的接口,负责将高级控制命令转换为低级的硬件操作。这一层通常包括:
2.2 控制算法层
控制算法层负责实现电机控制的核心算法,如PID控制、速度控制和位置控制。
2.3 用户接口层
用户接口层提供与用户交互的接口,可以是图形界面、命令行界面或网络接口。
3. 算法实现
3.1 PID控制
PID控制是一种广泛使用的反馈控制算法,它根据误差和误差的变化率来调整控制信号。
- 比例(P) :直接响应当前误差。
- 积分(I) :响应误差的累积。
- 微分(D) :预测误差的未来趋势。
3.2 速度控制
速度控制算法需要根据设定的速度和电机的实际速度来调整PWM信号,以实现速度的精确控制。
3.3 位置控制
位置控制算法需要结合速度控制和位置反馈(如编码器)来实现精确的位置控制。
4. 编程实现
4.1 选择合适的编程语言
电机控制器的编程语言选择取决于硬件平台和开发环境。常见的选择包括C/C++、Python和MATLAB。
4.2 初始化硬件
在编程开始时,需要初始化所有硬件接口,包括GPIO、PWM和ADC。
// 伪代码示例
initializeGPIO();
initializePWM();
initializeADC();
4.3 实现控制算法
根据选择的控制算法,编写相应的代码来实现电机控制。
// 伪代码示例
void controlMotor() {
float error = targetPosition - currentPosition;
float controlSignal = PIDController(error);
setPWM(controlSignal);
}
4.4 用户接口
实现用户接口,允许用户设置参数和监控电机状态。
// 伪代码示例
void userInterface() {
while (true) {
printMenu();
int choice = getUserInput();
switch (choice) {
case 1:
setTargetPosition();
break;
case 2:
printMotorStatus();
break;
// ...
}
}
}
5. 测试与调试
在编程完成后,需要进行充分的测试和调试,以确保电机控制器的稳定性和准确性。
5.1 单元测试
对每个模块进行单元测试,确保它们在隔离状态下正常工作。
5.2 集成测试
在所有模块集成后,进行集成测试,确保它们协同工作。
5.3 现场测试
在实际应用环境中进行现场测试,以验证电机控制器的性能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
编程
+关注
关注
90文章
3729浏览量
97538 -
电机控制器
+关注
关注
21文章
587浏览量
33504 -
工业自动化
+关注
关注
17文章
3321浏览量
70199
发布评论请先 登录
相关推荐
热点推荐
深入解析CARLO GAVAZZI AC半导体电机控制器
深入解析CARLO GAVAZZI AC半导体电机控制器 在电机控制领域,选择合适的控制器对于电机
探索CARLO GAVAZZI电机控制器:RSE 1112 - BS、RSE 2312 - BS、RSE 4012 - BS
探索CARLO GAVAZZI电机控制器:RSE 1112 - BS、RSE 2312 - BS、RSE 4012 - BS 在电子工程领域,电机控制器是实现
探秘AC半导体电机控制器RSHR:功能、特性与应用详解
探秘AC半导体电机控制器RSHR:功能、特性与应用详解 在工业自动化领域,电机控制器是驱动电机高效运行的关键设备。今天,我们就来深入了解一款
PIC18FXX80/XX85 Flash微控制器编程规范解析
PIC18FXX80/XX85 Flash微控制器编程规范解析 在电子工程师的日常工作中,微控制器的编程是一项至关重要的任务。今天我们就来深入探讨一下Microchip公司的PIC18
AH288 高压霍尔效应智能风扇电机控制器:设计与应用解析
AH288 高压霍尔效应智能风扇电机控制器:设计与应用解析 在电子设备的散热系统中,风扇电机控制器起着至关重要的作用。今天,我们就来深入了解一款高性能的风扇
PLC怎么控制多台交流伺服电机达到同步工作
在现代工业自动化控制系统中,多台交流伺服电机的同步控制是实现高精度运动控制的关键技术之一。PLC(可编程逻辑

这是一款新能源汽车电机控制器老化测试设备
随着新能源汽车市场的快速发展,电机控制器作为新能源汽车的核心部件之一,其可靠性和稳定性显得尤为重要。目前部分新能源汽车电机控制器出厂前未经过严苛的模拟极限工况环境进行老化测试,这会给
发表于 02-05 15:01
深入剖析DRV8828 H桥电机控制器IC:特性、应用与设计要点
深入剖析DRV8828 H桥电机控制器IC:特性、应用与设计要点 在电机控制领域,一款性能优良的电机控制
电驱动系统之电机控制器
电机控制器功能01驱动时,将高压直流电,通过IGBT功率模块,转换成三相交流电,驱动电机输出动力给减速器;发电时,将电机线圈端产生的三相交流

从燃油泵到电动航空:高速电机控制器的技术革命
在电动航空革命浪潮中,高速电机控制器正扮演着越来越关键的角色。作为泰德航空的核心研发方向之一,我们深刻认识到这项技术对于未来飞行器发展的重要意义,带您深入了解这一推动航空电动化进程的核心技术


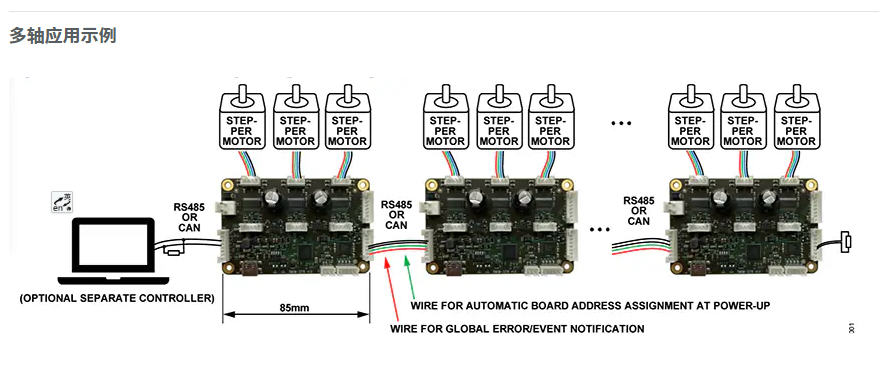
TMCM-3216步进电机控制器/驱动器模块
Analog Devices Inc. TMCM-3216步进电机控制器/驱动器模块是紧凑型3轴双极步进电机控制器和独立驱动
普源示波器MHO5000实现电机控制器全链路实时与故障预测
在现代工业自动化和智能制造领域,电机控制器的性能直接关系到设备的运行效率和可靠性。普源示波器MHO5000作为一款高性能的测试测量工具,能够在电机控制器的研发、生产和维护过程中,提供全

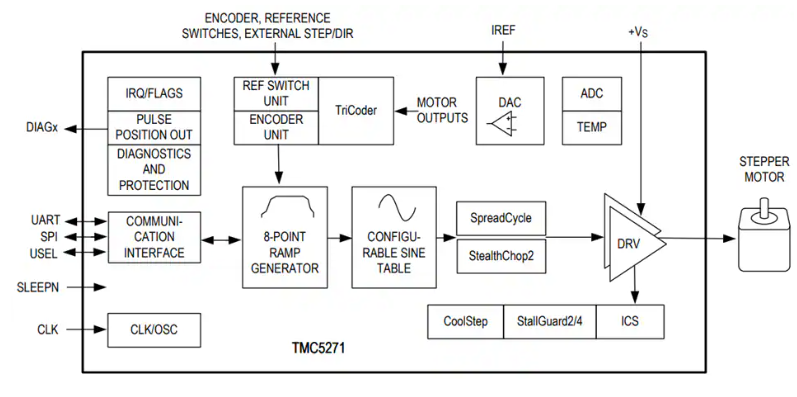
ADI Trinamic TMC5271步进电机控制器数据手册
ADI Trinamic TMC5271步进电机控制器是一款 高性能、单轴步进控制器和驱动器IC,具有串行通信接口(SPI和UART)。该电机



评论