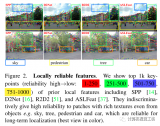
介绍 以往的特征检测和匹配算法侧重于提取大量冗余的局部可靠特征,这样会导致效率和准确性有限,特别....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-30 10:49
•1620次阅读
激光SLAM很多人都觉得很难,对于初学者更是不知道从哪里开始学起,怎样才能更高效的学习,进入相关企业....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-29 15:28
•1502次阅读
0摘要 相位测量偏转法(PMD)具有动态范围大、非接触式操作、全场测量、采集速度快、精度高、自动数据....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-29 10:01
•4541次阅读

自动驾驶传感器配置需求随着汽车智能化和电动化的快速发展不断增加。当前的传感器趋向于从探测范围、探测精....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-29 10:00
•1195次阅读
SAM被认为是里程碑式的视觉基础模型,它可以通过各种用户交互提示来引导图像中的任何对象的分割。SAM....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-28 15:08
•6938次阅读

SGBM(Semi-Global Block Matching)是一种用于计算双目视觉中视差(dis....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-28 09:29
•3438次阅读
激光slam中,LOAM(Lidar Odometry and Mapping in Real-ti....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-28 09:25
•1733次阅读

多阶段策略在图像修复任务中被广泛应用,虽然基于Transformer的方法在单图像超分辨率任务中表现....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-27 11:07
•2210次阅读

导读 本文是VCC马雪奇同学对论文 SHINE-Mapping: Large-Scale 3D....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-27 11:01
•2664次阅读

VCPKG是微软C++ 团队开发的适用于C 和C++ 库的跨平台开源软件包管理器,它大大简化了Win....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-27 09:14
•6004次阅读

MVTec MERLIC & HALCON – Mvtec公司宣布了一个基于Halcon库的新的视觉....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-26 11:40
•4965次阅读
摘要 准确地感知物体实例并预测它们未来的运动是自动驾驶车辆的关键任务,使它们能够在复杂的城市交通....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-25 16:06
•1293次阅读

Neural Radiance Fields (NeRF) 通过合成 3D 场景新视角图像展现出惊人....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-25 11:11
•1173次阅读

视觉感知算法的核心在于精准实时地感知周围环境,以便下游更好地进行决策规划,而 目标检测任务 就是视觉....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-25 10:37
•1559次阅读

SLAM(The Simultaneous Localisation and Mapping)中文的....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-25 10:35
•1473次阅读

00 Eigen简介 Eigen:基于线性代数的C ++模板库,主要用于矩阵,向量,数值求解器和相关....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-25 10:28
•1726次阅读
对于一个m线的激光雷达,在扫描的某一时刻会得到m个点,如果旋转一周扫描了n次,那么得到的点云就可以用....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-21 10:30
•3621次阅读

视觉惯性融合技术应用于机器人和自动驾驶方面。单目相机和低成本IMU成为最佳选择。因为VIO系统的高度....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-21 09:22
•2317次阅读

所有这些部分都是密切相关的。车辆和道路实体的位置信息可以通过结合位置、感知和地图信息来获得。相比之下....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-20 10:04
•3226次阅读

机器人对未知环境的自主探索是机器人智能化的关键技术。为了提高搜索效率,作者提出了一种基于边界点优化和....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-19 10:19
•2767次阅读
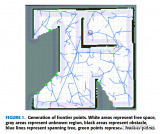
目标边界点的选择是有效探索的关键。以边界为基础的战略是由Yamauchi首先提出的。所使用的探索策略....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-19 10:15
•1143次阅读
一、摘要 本文介绍了一种基于深度学习的三维点云配准新方法。该架构由三个部分组成: (1)编码器由基于....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-17 09:54
•2415次阅读

我们都知道特征检测和匹配是计算机视觉领域中的重要任务,它们在许多应用中发挥着关键作用,比如SLA....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-16 16:48
•5847次阅读
vMAP 是一种基于神经场的对象级密集 SLAM 系统,可根据 RGB-D 输入流实时自动构建对象级....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-15 09:29
•1795次阅读

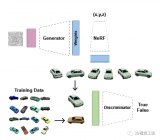
3D对象的生成模型在VR和增强现实应用中越来越受欢迎。但使用标准的3D表示(如体素或点云)来训练....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-14 10:16
•2164次阅读
作者引入了一种方法,可以仅使用单个宽基线立体图像对生成新视角。在这种具有挑战性的情况下,3D场景点只....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-13 09:29
•1682次阅读

本文旨在介绍使用OptiTrack光学跟踪系统和Turtlebot机器人进行视觉SLAM定位实验的详....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-13 09:24
•3119次阅读

近日,Snap 研究院推出最新高性能 Stable Diffusion 模型,通过对网络结构、训练流....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-12 15:25
•1912次阅读

介绍 NeRF( Neural Radiance Fields )是一种先进的计算机图形学技术,能够....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-12 09:52
•8436次阅读

LeGO-LOAM全称为:Lightweight and Groud-Optimized Lidar....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-11 15:02
•2853次阅读