1. 摘要 神经辐射场(NeRF)是一种新颖的隐式方法,可以实现高分辨率的三维重建和表示。在首次提出....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 11-14 16:48
•1893次阅读

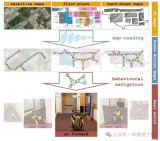
机器人能否像人类一样利用有限的度量和空间信息进行导航呢?目前,大多数机器人的导航系统依赖于详细的几何....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 11-13 10:51
•1642次阅读
同时定位与地图构建(SLAM)是一项关键技术,允许移动机器人在部分或完全未知的环境中自主导航。它包括....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 11-12 11:26
•2090次阅读

0. 这篇文章干了啥? 机器人学中的一个基本问题是创建机器人观察到的场景的有用地图表示,其中有用性由....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 11-12 10:54
•1222次阅读

同步定位与地图构建 (SLAM) 是计算机视觉中的一个基本问题,旨在在同时跟踪相机姿势的同时对环境进....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 11-11 16:17
•1552次阅读

在众多无人机类型中,四旋翼因其具备垂直起降、稳定性强、结构相对简单等特点而得到广泛应用。目前,无论是....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 11-08 09:41
•2113次阅读

这篇文章提出了一种新颖的目标跟踪方法SFTrack,针对无人机(UAV)视频中的独特挑战,采用了三种....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 11-01 10:23
•1683次阅读

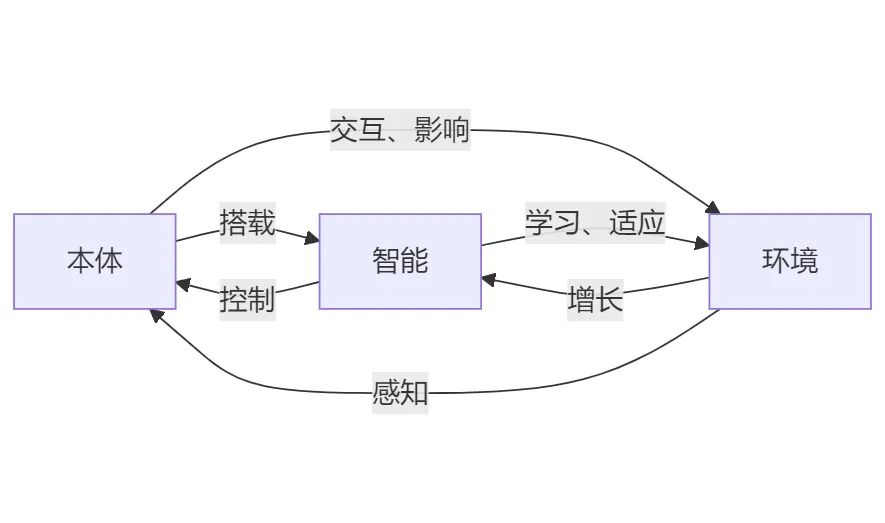
还是各类具身智能产品,如李飞飞的 Voxposer、谷歌的 RT1 和 RT2、谷歌的 RTX、字节....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 11-01 10:19
•7076次阅读
精确和鲁棒的初始化对于视觉惯性里程计(VIO)至关重要,因为不良的初始化会严重降低姿态精度。
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 11-01 10:16
•1708次阅读

近年来,点云表示已成为计算机视觉领域的研究热点之一,并广泛应用于自动驾驶、虚拟现实、机器人等许多领域....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 10-29 09:43
•2511次阅读

运动恢复结构(SfM)是计算机视觉领域一个长期存在的问题,旨在根据每个相机拍摄的图像来估计场景的3D....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 10-28 14:13
•3064次阅读

掌握这 17 种方法,用最省力的方式,加速你的 Pytorch 深度学习训练。
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 10-28 14:05
•1339次阅读

3D多目标跟踪(3D MOT)在各种机器人应用中发挥着关键作用,例如自动驾驶车辆。为了在驾驶时避免碰....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 10-28 10:07
•1400次阅读

视觉定位旨在估计在已知环境中捕获的给定图像的旋转和位置,大致可以分为绝对姿态回归(APR),场景坐标....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 10-28 10:03
•1264次阅读

视觉匹配是关键计算机视觉任务中的关键步骤,包括摄像机定位、图像配准和运动结构。目前最有效的匹配关键点....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 10-28 09:57
•1770次阅读

扩散模型的迅速崛起是过去几年机器学习领域最大的发展之一。在这本简单易懂的指南中,学习你需要知道的关于....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 10-28 09:30
•2471次阅读

BundleFusion是一种稠密的实时室内场景三维重建算法框架。输入为RGB-D相机采集的并且是对....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 04-16 09:37
•2383次阅读

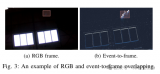
这篇文章的基本原理是利用事件驱动的视觉传感器(DVS)和传统的RGB摄像头相结合,实现在边缘设备上实....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 04-13 12:15
•2047次阅读
为了使用三维运动先验正则化估计的三维轨迹,模型另外预测了每条轨迹的刚性嵌入,这使能够软地分组表现出相....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 04-13 12:12
•2196次阅读

基于NeRF的SLAM算法采用全局地图和图像重建损失函数,通过可微分渲染捕获稠密的光度信息,具有高保....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 04-01 12:44
•1965次阅读
这篇论文介绍了一种名为RT-DETR的实时检测Transformer,是第一个实时端到端目标检测器。
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 03-06 09:24
•4078次阅读

基于Transformer架构的大型模型在人工智能领域中发挥着日益重要的作用,特别是在自然语言处理(....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 02-22 16:27
•1564次阅读

背景部分介绍了3D点云应用领域中公开可访问的数据集的重要性,这些数据集对于分析和比较各种模型至关重要....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 02-22 16:16
•2684次阅读

控制模块可以分为控制逻辑和控制算法两大部分,逻辑用于处理各种输入输出的选择、切换等,算法是输入输出具....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 02-20 10:43
•1639次阅读

精确、快速地划定清晰的边界和鲁棒的语义对于许多下游机器人任务至关重要,例如机器人抓取和操作、实时语义....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 02-20 10:30
•1954次阅读

基于NeRF的SLAM算法采用全局地图和图像重建损失函数,通过可微分渲染捕获稠密的光度信息,具有高保....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-26 10:48
•1470次阅读

Uni3D在少样本点云部件分割任务上也展示出了卓越的性能。下表结果显示,在各种实验条件下,Uni3D....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-25 10:10
•1308次阅读

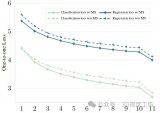
混合监督会产生比基线更低的一对一损失。x轴对应epoch,y轴对应一对一监督的训练损失。虚线和实线分....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-23 14:14
•1485次阅读
S3DIS Area 5的大规模全景分割结果,共有9.2 M个点( 78M预采样)和1863个真实"....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-22 14:03
•1399次阅读

发自动驾驶论文哪少的了数据集,今天笔者将为大家推荐一篇最新的综述,总结了200多个自动驾驶领域的数据....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-19 10:48
•1807次阅读



