 3D激光SLAM是用LOAM还是LeGo-LOAM?
3D激光SLAM是用LOAM还是LeGo-LOAM?

激光slam中,LOAM(Lidar Odometry and Mapping in Real-time)系列具有举足轻重的地位。下面的表格是近年来LOAM系列算法的汇总。
| 算法名称 | 发表名称 | 作者 | 备注 |
|---|---|---|---|
| LOAM | 2014 | Ji Zhang | 基于激光雷达而搭建的在ROS平台下的SLAM系统 |
| A-LOAM | 实现了LOAM开源代码,并做了部分优化 | ||
| LeGO-LOAM | 2018 | Tixiao Shan | 与IMU是松耦合 |
| LlOM | 2019 | Haoyang Ye | 与IMU是紧耦合 |
| LIO-SAM | 2020 | Tixiao Shan | LeGO-LOAM升级版,与IMU紧耦合 |
LeGo-Loam是基于ros系统框架的3D激光slam开源代码。代码简洁,其中大量计算都是手动推导出来,依赖库相对较少,主要依赖gtsam进行后端因子图优化。其中在前端里程计计算中,通过地面特征和线特征分开来计算机器人姿态,减少计算量,提高前端计算效率。其系统框架如下图:
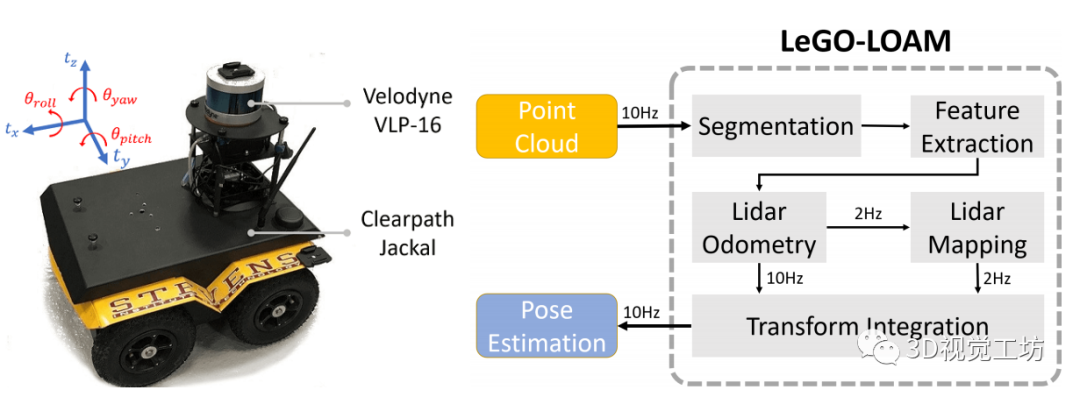
相对于LOAM算法,LeGo-LAOM能够进行地面优化,同时保证了轻量级,也加入了回环检测模块。
相对于LOAM算法,LeGo-LAOM能够进行地面优化,同时保证了轻量级;也使用了Keyframe概念以及回环检测位姿图优化的方式对后端进行重构。
对于工业领域而言,LeGo-LOAM有非常广泛的应用,尤其是工业机器人领域,LeGo-LOAM一直都是应聘者必须掌握的框架。
对于学术研究而言,LeGo-LOAM是激光SLAM的经典框架,LeGo-LOAM源码简洁清晰,比LOAM算法的代码可读性要高很多。近几年各顶会上的很多SLAM算法设计思想都潜移默化地受LeGo-LOAM的影响,对其的改进思路相较于LOAM也比较多样化。
如何高效学习LeGo-LOAM?
学习SLAM主要需要攻克三大难关:
扎实的数学基础
对整个SLAM大框架及细节部分理解到一定深度
比较高度的编程能力
这三点都绝非易事,需要花很大的功夫,中间也有不少弯路要走。
审核编辑:刘清
-
工业机器人
+关注
关注
91文章
3551浏览量
98512 -
SLAM
+关注
关注
24文章
460浏览量
33425 -
3D激光
+关注
关注
0文章
32浏览量
7758
原文标题:3D激光SLAM是用LOAM还是LeGo-LOAM?
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
一径科技NZ系列广角全场景3D激光雷达全面赋能商用清洁机器人
禾赛科技2025年割草机器人3D激光雷达出货量第一
常见3D打印材料介绍及应用场景分析

iDS iToF Nion 3D相机,开启高性价比3D视觉新纪元!

什么是激光雷达 3D SLAM技术?

从3D传感器到立体相机,解锁工业应用新可能

半导体“HBM和3D Stacked Memory”技术的详解
LMI Gocator 6300系列智能3D线激光轮廓传感器介绍
全新轻量级ViSTA-SLAM系统介绍

洛微科技携4D FMCW激光雷达与3D感知方案闪耀光博会,引领行业新趋势

玩转 KiCad 3D模型的使用
解析寻迹智行3D SLAM无人叉车的"智慧"从何而来?(本文纯干货)
一种适用于动态环境的3DGS-SLAM系统




评论