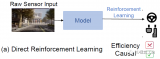
通常,模块化系统被称为中间范式,并被构建为离散组件的管道(图3),连接传感器输入和运动输出。模块化系....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 09-04 16:25
•2222次阅读

将BEV下的每个grid作为query,在高度上采样N个点,投影到图像中sample到对应像素的特征....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 09-04 10:22
•2770次阅读

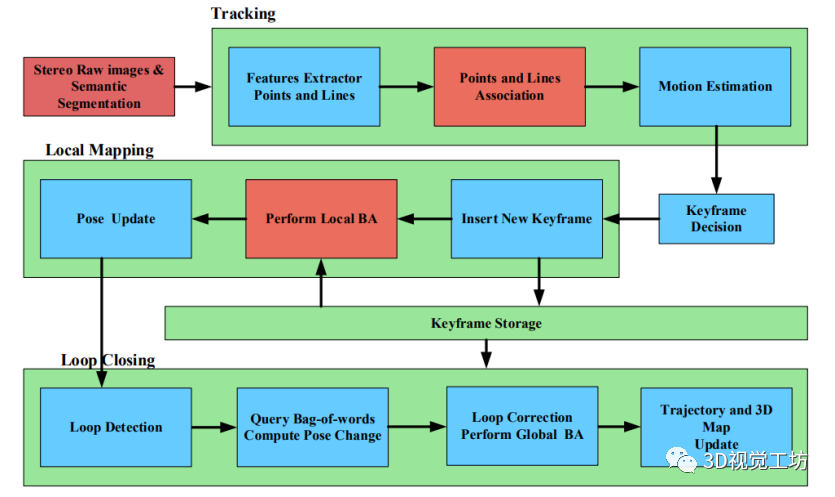
传统的同步定位与制图(SLAM)系统使用环境的静态点作为实时定位和制图的特征。当可用的点特征很少时,....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 09-01 17:16
•1724次阅读
神经辐射场(NeRF)通过将三维场景编码成隐式表示,在视觉领域中广泛应用。通过学习多层感知机(MLP....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 09-01 16:14
•1467次阅读

该方法具体通过六个步骤实现:图像的采集、系统相机标定、特征模板匹配、图像处理、三维仿真匹配以及三维重....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 09-01 16:12
•4366次阅读
算法景深与光机和相机景深的关联的确有点不好理解,这玩意儿有点复杂,和不同的硬件实现方法还有区别。正常....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 09-01 15:21
•1885次阅读
激光slam中,LOAM(Lidar Odometry and Mapping in Real-ti....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-31 15:54
•1639次阅读

本文提出从两个方面解决dToF数据的空间模糊:利用RGB-dToF视频序列中的多帧信息融合和dToF....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-30 15:15
•2944次阅读

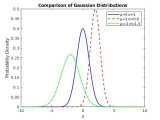
卡尔曼滤波是一种用于估算线性动态系统状态的优化算法,其基础数学理论为贝叶斯定理,将传感器测量值和系统....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-30 10:18
•3530次阅读
卡尔曼滤波是一种用于估算线性动态系统状态的优化算法,其基础数学理论为贝叶斯定理,将传感器测量值和系统....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-30 10:18
•1788次阅读

大多数现有的视觉SLAM方法严重依赖于静态世界假设,在动态环境中很容易失效。本文提出了一个动态环境下....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-25 16:49
•1668次阅读

Transformer来源于自然语言处理领域,首先被应用于机器翻译。后来,大家发现它在计算机视觉领域....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-22 14:52
•1284次阅读

图7 TrackFormer 流程图图7TrackFormer得具体流程图,该方法采用类似Motr和....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-22 14:44
•1590次阅读

1 前言 大多数现有的3D网络架构通过稠密且规则的三维体素网格来代替2D像素阵列,并使用3D卷积和池....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-21 09:53
•2044次阅读

SfM是指给定一组无序图像,恢复出相机位姿以及场景点云。通用场景下的SfM效果已经很好,而且COLM....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-21 09:22
•3557次阅读

就以这两天的最新进展来说,国外,马克斯·普朗克固体物理和材料研究所猛下血本,直接整出了Pb₁₀₋ₓC....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-18 16:14
•1099次阅读
LOG-LIO的流程接收来自3D激光雷达和惯性测量单元(IMU)的输入,如图2所示。对于新的输入扫描....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-18 15:45
•1718次阅读

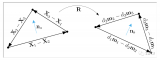
PnP是指根据2D-3D对应关系集合估计相机绝对位姿,集合最小的情况是P3P问题。P3P是将2D-3....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-18 15:40
•2495次阅读
但是最近有一个团队就推出了这样的工作,也就是CMU、IIIT Hyderabad、MIT、AIML联....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-14 11:58
•1600次阅读
语义占用网格感知对于自动驾驶至关重要,因为自动驾驶车辆需要对3D城市场景进行细粒度感知。
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-14 09:37
•1766次阅读

卡尔曼滤波(Kalman Filter),以下简称KF,是由Swerling(1958)和Kalma....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-10 09:58
•12969次阅读
说到纯视觉的自动驾驶方案,大家第一个想到的就是Tesla吧。的确,早在2021年,Tesla就已经实....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-07 16:34
•1419次阅读

当车辆位于十字路口时,自车的路径实际上应该是根据信号灯来决定的。但是在图像上信号灯很小,周围车辆很大....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-07 15:07
•1364次阅读
dToF(直接飞行时间)雷达的发展前景非常广阔。随着技术的不断进步和应用场景的增多,dToF雷达在许....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-07 10:31
•1101次阅读
作者对多个 DETR 类检测器的 GFLOPs 和时延进行了对比分析,如图 1 所示。从图中发现,在....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-02 15:34
•1895次阅读

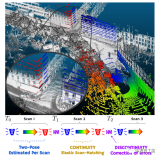
通过在每一帧扫描的开始和结束时刻联合优化两个姿势,并根据时间戳进行插值,使扫描进行弹性变形以与地图(....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 08-02 15:29
•2400次阅读
dToF(直接飞行时间)雷达的发展前景非常广阔。
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-31 09:22
•3262次阅读
WormGPT 基于 2021 年开源的 LLM GPT-J 模型开发,也是对话聊天机器人,可以处理....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-29 16:35
•2245次阅读

目标检测的结果可以和场景流估计结合,可以通过多任务框架将两个任务统一到一个网络框架中。例如,一种方法....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-29 16:27
•1483次阅读

现有的文本到三维模型的生成方法通常使用NeRF等隐式表达,通过体积渲染将几何和外观耦合在一起,但在恢....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-29 16:25
•1091次阅读



