用于SLAM的神经隐含可扩展编码
我们提出了NICE-SLAM,一个密集的RGB-D SLAM系统,它具有实时性、可扩展性、预测性和对....
基于点到极线度量的用于道路车辆的双目视觉里程计
精准定位是所有自动驾驶系统的基础组成模块。本文,我们专注于双目相机,提出一种名叫SOFT2的新方法,....
NeRF的研究目的是合成同一场景不同视角下的图像
为了顺利完成上面过程,我们可能需要维护***Tensor来表示辐射场,查表获取RGB和密度。这里一个....
决策规划,全局路径规划常用算法
如果给图的每条边规定一个方向,那么得到的图称为有向图,其边也称为有向边,如图10所示。在有向图中,与....
TransGeo:第一种用于交叉视图图像地理定位的纯Transformer方法
提出了一种注意力引导的非均匀裁剪策略,去除参考航空图像中的大量非信息补丁以减少计算量,性能下降可忽略....
ORB-SLAM3与ORB-SLAM2相比有哪些优势呢?
自主导航是机器人基础性和关键性技术,是机器人实现其他更高级任务的前提。视觉 SLAM (Simult....
通过计算机视觉和NodeJS实现灯光自动化方案分享
“计算机视觉,通常缩写为CV,被定义为一个研究领域,旨在开发帮助计算机‘看到’和理解照片和视频等数字....
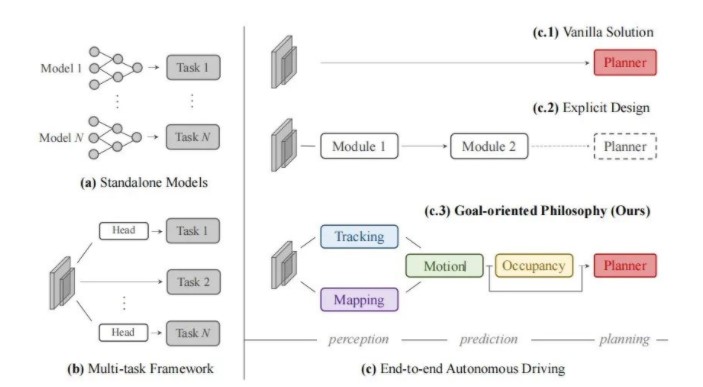
神经渲染技术在自动驾驶领域应用
近年来,自动驾驶技术发展突飞猛进,很多在实验室中的实验性项目已经逐步走向市场大众。然而时至今日,自动....
Windows+VSCode配置OpenCV C++一站式开发调试环境教程
首先,打开OpenCV-MinGW-Build,找到对应的Releases版本。这里以OpenCV-....
如何使用纯格雷码进行三维重建?
对于新手来说,使用格雷码做单目结构光三维重建是一个入门级的训练。但是在复现时往往会遇到一个问题,明明....
使用USD开发数字孪生项目?试试在NVIDIA Omniverse写代码
上面提到的Omniverse 的3D设计协作和仿真,是指在Omniverse 平台内,三维工作人员之....
一个基于学习的LiDAR点云3D线特征分割和描述模型
这个工作来自于浙江大学和DAMO academy。在点云配准领域,尽管已经有很多方法被提出来,但是无....
无需实例或类级别3D模型的对新颖物体的6D姿态追踪
跟踪RGBD视频中物体的6D姿态对机器人操作很重要。然而,大多数先前的工作通常假设目标对象的CAD ....
434名贡献者、3300多次代码提交的PyTorch最新版本1.11来了
大家都知道,PyTorch是Facebook在2017年开源的一个针对深度学习的张量库。它凭借容易上....
用于3D激光雷达SLAM回环检测的实时词袋模型BoW3D
Lego-LOAM是基于轨迹位姿方法的回环检测,使用KDtree寻找当前位姿的历史最近位姿,之后把历....
一种融合网络RADIANT来解决雷达-摄像机关联的方案
作为一种能够直接测量深度的传感器,其相较于Lidar存在较大的误差,因此利用雷达本身精度难以精确地将....
一种有效将3D点云分割成平面组件的多分辨率方法
在实验中,将改方法与使用 SegComp 数据库的最先进方法进行了比较。实验结果表明,我们以高帧率和....
面向智能移动平台的语义定位与建图
通常来说基于机载或车载的传感器,图 1 是实验室自己的感知采集平台,平台上搭载了不同传感器,包括激光....
目标检测正负样本区分策略和平衡策略总结
rpn head的输出是包括分类和回归,分类是二分类,只区分前景和背景;回归是仅仅对于前景样本(正样....
Maplab 2.0发布:多传感器融合的SLAM框架
在图2中,建图节点在每个机器人上运行,并将传感器数据收集到子地图中,这些子地图被传递到集中式服务器,....
一种基于相位靶标的摄像机标定迭代畸变补偿算法
相机畸变是影响相机标定精度的关键因素。由于畸变补偿不准确,传统的标定方法不能满足要求较高标定精度的测....
高分辨率、实时的手持物体360°三维模型重建结构光技术
为了从不同的视图获得和对齐物体的三维形状,通常需要仪器辅助来执行三维配准[7–9]。常见的辅助仪器包....
基于覆盖分数的采样方法用于视觉定位问题
为什么使用连续学习,它与一般的深度学习联合训练所有场景数据有何不同?连续学习是不断从传入的数据流中学....
基于PGO方法实现快速且精确地求解SLAM优化和估计问题
本文组织如下。第二节描述通用的非线性图优化以及这四种方法中的每一种。实验是本文的主要部分,在第三节中....
一个实时单目追踪和稠密建图的算法框架TANDEM算法研究
简单总结,TANDEM使用了稠密追踪前端和稀疏后端优化相结合的方式来提高追踪性能。
立体匹配:经典算法Fast Bilateral Solver
而下面左图是OpenCV的SGBM算法得到的视差图,右边则是通过我今天要介绍的算法处理后的视差图。看....
强势的点云处理神经网络PointNe介绍
PointNet++是Charles R. Qi团队在PointNet论文基础上改进版本,其核心是提....
Global SfM和ncremental SfM知识讲解
Sfm 可以分为以下几类:Global SfM、Incremental SfM、Hybrid SfM....


