本研究提出了ExTraCT框架,利用自然语言进行轨迹校正。该框架结合了大型语言模型(LLMs)用于自....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-19 10:45
•1493次阅读

考虑到3D点云的稀疏性质,iDet3D设计了负点击模拟 (NCS),通过减少误报预测来提高准确性。还....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-16 16:08
•1292次阅读

另外,之前被网友调侃是“和谐号”车头的理想MEGA也将于3月1日正式发布,比原定发布时间推迟了2个多....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-14 10:00
•1919次阅读

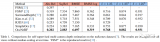
BEV感知的主要工作。在输入模态下," L "为LiDAR," SC "为单相机," MC "为多相....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-14 09:53
•2265次阅读

BEV是Bird's Eye View 的缩写,意为鸟瞰视图。在自动驾驶领域,BEV 是指....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-13 09:41
•4602次阅读

TUM数据集上相机跟踪结果,评价指标是ATE RMSE [ m ] (↓),表示相关文献未提及这个数....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-12 11:24
•956次阅读

图像匹配是各种视觉应用中基本且关键的任务,如同时定位与地图构建( Simultaneous Loca....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-06 10:24
•1527次阅读

本研究提出了一种自监督的多摄相机3D占据预测方法,名为OccNeRF。该方法旨在解决无界场景的建模问....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-02 14:53
•1191次阅读
本文提出了一种全新的学习型PatchMatch MVS框架,DS-PMNet,并嵌入了DeformS....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-02 09:25
•1802次阅读

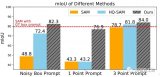
SAM、HQ-SAM、Stable-SAM在提供次优提示时的性能比较,Stable-SAM明显优于其....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-29 14:35
•1726次阅读
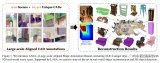
DisCo方法:提出了一种基于扩散的跨模态形状重建方法。该方法利用三平面扩散模型,结合部分点云和多视....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-26 16:44
•1218次阅读
Gaussian-SLAM提出了用于seeding和优化Gaussian splats的新策略,以将....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-26 16:38
•2291次阅读

该标定过程仅需10分钟,能够自动完成所有校准步骤,无需人工干预。通过该标定解决方案,相机模组能够实现....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-19 15:14
•3107次阅读
今天笔者将为大家分享NVIDIA的最新开源方案FoundationPose,是一个用于 6D 姿态估....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-19 09:58
•2501次阅读

这个速度计框架以事件数据和IMU测量作为输入。图中所示分别为:(a) 无人机在狭窄走廊中进行攻击行为....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-18 15:43
•1135次阅读

可以看一下单目深度估计效果,这个深度图的分辨率是真的高,物体边界分割的非常干净!这里也推荐工坊推出的....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-17 10:01
•1792次阅读

现有的3D物体检测方法通常需要使用完全注释的数据进行训练,而使用预训练的语义特征可以带来一些优势。
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-14 10:00
•1958次阅读

MasQCLIP在开放词汇实例分割、语义分割和全景分割三项任务上均实现了SOTA,涨点非常明显。这里....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-12 11:23
•1867次阅读

我们知道扩散模型生成图像是通过反转采样来进行的,重点是识别噪声。LEDITS++从DDPM反演中提取....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-10 10:09
•1665次阅读

2021 年,Facebook 将「元宇宙(metaverse)」作为公司主营业务,并将公司名称更改....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-10 10:02
•1576次阅读

利用深度学习网络模型DYnet++从单个复合图案中获取相位信息。为了训练深度学习模型,作者使用了一个....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-04 15:29
•1521次阅读
多视图立体几何(Multi-View Stereo,MVS)是计算机视觉中重要的研究领域,也是迈入三....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-04 10:08
•1707次阅读

服务机器人、巡检机器人、自动驾驶车辆等SLAM应用,需要进行长时间的定位和导航,但是可能会遇到很多光....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-04 10:01
•1865次阅读

提出了一种基于RGB-D图像序列的协同隐式神经同步定位与建图(SLAM)系统,该系统由完整的前端和后....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 11-29 10:35
•1739次阅读

最后,为了进一步提高视觉质量,我们提出了一种结构引导细化器来组合预测条件,以更详细地生成更高分辨率。....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 11-27 16:03
•1545次阅读

在一对图像中寻找匹配的像素是具有各种应用的基本计算机视觉任务。由于光流估计和局部特征匹配等不同任务的....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 11-27 11:32
•1601次阅读

分配样本数量:根据场景的不同区域,分配不同数量的样本来表示地面真实外观。对于复杂的模糊表面,需要更多....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 11-25 11:49
•1657次阅读

本文在ZJU-MoCap和H36M上进行了泛化性实验,结果如下图所示。主要分为四个setting: ....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 11-23 11:25
•1327次阅读

本文提出了一种在线激光雷达语义分割框架MemorySeg,它利用三维潜在记忆来改进当前帧的预测。传统....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 11-21 10:48
•1437次阅读

在自动驾驶中,感知、表示和重建动态场景对于代理程序理解并与其环境进行交互至关重要。
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 11-21 10:23
•4651次阅读



