相对于LOAM算法,LeGo-LAOM能够进行地面优化,同时保证了轻量级,也加入了回环检测模块。本课....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-11 10:21
•2652次阅读
VPS全称为Visual Positioning System,即视觉定位系统。
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-09 09:27
•2233次阅读

obj_points、img_points_left和img_points_right分别是存储每个....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-08 16:28
•4023次阅读
双目标定的方法有很多,常用的是基于棋盘格图案的张氏标定法,它利用多幅不同角度拍摄的棋盘格图像,通过提....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-06 14:35
•1863次阅读
在全局最小二乘拟合中,我们假设整个域中都可以用一个单一的多项式精确地描述数据所代表的函数。但是,对于....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-06 14:33
•1651次阅读

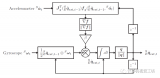
受简化惯性传感器系统(RISS)[23]的启发,我们开发了视觉惯性车轮里程计(VIWO)。具体而言,....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-06 14:30
•2582次阅读

基于坐标的网络将输入点坐标嵌入到高维空间,使用正弦或其他频率嵌入,使它们能够捕捉高频细节,这对高保真....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-02 16:39
•4606次阅读

移动机器人需要一种对环境干扰具有鲁棒性的可靠位姿估计器,为此,惯性测量单元(IMU)发挥了重要作用,....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-02 14:55
•2038次阅读
与以往基于学习的视觉定位算法的区别在于:以前的方法往往需要数小时或数天的训练,而且每个新场景都需要再....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-01 14:38
•1284次阅读

相机标定是通过输入带有标定patter的标定板来获得相机参数的一个过程。实际的光学成像是一套非常复杂....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 06-01 14:36
•1570次阅读

Madgwick算法与Mahony算法相比,最大的不同之处是如何对待加速度计估计的误差。Mahony....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-31 11:12
•5847次阅读
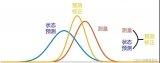
卡尔曼滤波是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-30 09:20
•2338次阅读
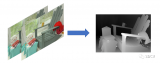
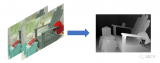
本文提出了一种新的深度立体网络训练框架,可以从使用单个手持相机拍摄的图像序列中生成立体训练数据。....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-29 10:49
•1738次阅读

面向点云处理领域的基础工具课,主要以Python为编程主要语言,介绍Open3D库的使用方法。课程特....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-29 09:49
•7157次阅读

本文提出了一种生产化的端到端立体深度感知系统设计,可以完成预处理、在线立体校正和立体深度估计....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-26 16:12
•1566次阅读

所以,这篇arXiv的论文提出了一个简单而有效的基于SAM大模型的视听定位和分割框架,即AV-SAM....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-24 16:00
•1465次阅读

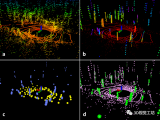
为了处理上述的问题,我们提出了SDMNet,一种新的由稀疏到密集的针对大规模室外点云的配准方法。稀疏....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-24 15:53
•2261次阅读

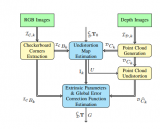
常见的消费级RGB-D相机具有粗略的内参和外参校准数据的,通常无法满足许多机器人应用所需的精度要求。
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-23 09:28
•2809次阅读
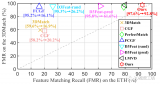
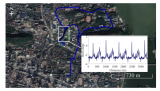
摘要 高度精确且鲁棒的定位能力对于城市场景中自动驾驶车辆(AVs)至关重要。传统的基于视觉的方法....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-22 11:42
•1552次阅读

城市场景中具有各种复杂的道路条件,例如城市峡谷、隧道、高架等,这使得AVs定位更具有挑战性。为了在该....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-22 11:38
•1521次阅读

首先要指出的是,Mahony算法假设加速度计测量的加速度完全由重力提供,即物体本体运动产生的加速度可....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-22 09:22
•4222次阅读

首先要指出的是,Mahony算法假设加速度计测量的加速度完全由重力提供,即物体本体运动产生的加速度可....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-22 09:18
•7688次阅读

给定一对矫正后的图像(IL, IR),目标是估计一个视差场d,使每个IL中的像素都有水平的位移。与R....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-19 09:24
•2106次阅读

第二个是我们防止 3D 片段/对象之间的过度判别,并通过 Siamese 对应网络中的自适应特征学习....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-17 09:28
•1825次阅读

立体匹配是计算机视觉的重要领域,通过给定一对经过校正的图像,计算对应像素之间的位移,即视差。
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-16 09:05
•3768次阅读

本文的研究背景是建立在摄像机校准技术的基础上,提出了一种新的技术,在不需要高昂成本设备(如正交平面)....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-15 15:54
•2033次阅读

立体匹配网络在一种称为成本体积(cost volume)的体积上运行,该体积在每个像素处汇聚每个可能....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-15 15:12
•1645次阅读
立体匹配领域中的数据驱动方法占据了主导地位。为了提高准确性,许多研究者采用了3D卷积和金字塔结构。为....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-12 16:20
•1380次阅读

尽管光场相机的空间分辨率较低,但是这一问题,有望随着感光芯片的技术进步而解决。机器阅读并去理解图像,....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-10 14:29
•2812次阅读

其中表示旋转矩阵,表示平移向量, 是残差误差。在实践中,由于这个问题的非凸性,同时找到对应关系和估计....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 05-10 11:42
•1395次阅读