




适用于激光SLAM的点云全局特征描述子回环检测方案
目前,SLAM算法通过估计的相邻帧之间的位姿变换不断叠加进行位姿信息计算,随着巡检时间的增加,每次位....






怎样才叫真正理解卡尔曼滤波Kalman Filter?
卡尔曼滤波算法:卡尔曼滤波算法包括预测、更新和估计三个步骤。其中,预测步骤通过状态的动态方程来预测系....
MAE再发力,跨模态交互式自编码器PiMAE席卷3D目标检测领域
MAE以其简单的实现方式、强大的视觉表示能力,可以在很多基础视觉任务中展现出良好的性能。但是目前的工....
悉尼大学最新综述:深度学习图像抠图
自深度学习出现之后,研究者设计出了多种多样的基于卷积神经网络的解决方案。和传统方法一样,早期的深度学....
双视图几何:你真的理解吗?
其实这部分内容在大多数课程和教材中都有涉及,很多人可能也觉得很简单,有一定的套路可言,但是如标题所说....
介绍一种基于编码器合成里程计的方案
摘要:本文主要分析轮式移动机器人的通用里程计模型,并以两轮差速驱动机器人的里程计计算为案例,给出简化....
连放4款UWB芯片新品!这家创企要捅破行业天花板
UWB技术在抗干扰性、高定位精度等方面的优势正在消费级市场凸显。全球市研机构ABI Research....
Limap:基于3D line的重建算法
但是基于特征点构建点云地图在没有足够稳定的关键点去检测匹配的时候,比如室内场景,往往效果不好。但是这....
利用TRansformer进行端到端的目标检测及跟踪
多目标跟踪(MOT)任务的关键挑战是跟踪目标下的时间建模。现存的用检测跟踪的方法采用简单的heuri....
决策规划系列:运动规划常用算法
有了全局路径参考信息,有了局部环境信息了,有了行为决策模块输入的决策信息,下一步自然而然的就要进行运....
NeuralLift-360:将野外的2D照片提升为3D物体
从3D点云中生成可渲染的3D网格:使用一个基于深度学习的方法来将点云转换为可渲染的3D网格。具体地,....
一文详解激光雷达原理之光学原理
905nm也好,1550nm也好,在自然光光谱中占比重较小,即在相同的自然光强下,这个波段的强度较低....
基于优化的多传感器全局位姿估计框架
精确状态估计是自主机器人的基础问题。为了实现局部精确且全局无漂移的状态估计,通常将具有互补性质的多传....
决策规划:行为决策常用算法
在基于规则的方法中,有限状态机(FiniteStateMaechine,FSM)成为最具有代表性的方....
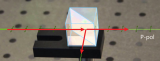
英伟达新方法入选CVPR 2023:对未知物体的6D姿态追踪和三维重建
这种方法适用于任意刚性物体,即使视觉纹理大部分确实,仅需在第一帧中分割出物体,不需要任何额外的信息,....


