介绍 一般意义上,相机姿态估计通常依赖于如手工的特征检测匹配、RANSAC和束调整(BA)。在本文中....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-23 15:22
•2700次阅读

近日,梅卡曼德对AI视觉软件Mech-DLK进行了重磅升级。全新升级的Mech-DLK内置快速定位、....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-23 15:19
•1896次阅读
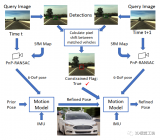
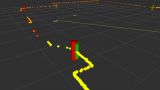
论文在III-B部分描述了论文方法背后的SLAM管道。论文的2D潜在先验网络(LPN)在III-C中....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-19 15:55
•1348次阅读

导读 继卷积神经网络之后,Transformer又推进了图像识别的发展,成为视觉领域的又一主导。最近....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-17 14:35
•1260次阅读
6自由度视觉定位是在给定先验三维地图和查询图像的情况下估计相机绝对姿态的任务。这是一个具有挑战性的研....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-17 14:30
•1066次阅读
C++一直都被称作是最难学的计算机语言,笔者从业多年,也认为确实如此。相比于其他几种语言,单纯从语法....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-17 14:27
•1023次阅读
深度学习在计算机视觉中的成功很大程度上是由卷积神经网络(CNNs)推动的。从AlexNet这一里程碑....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-17 14:25
•1616次阅读

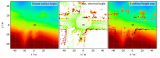
本文建立了一个用于无人机距离估计的UAVDE数据集,通过UWB传感器获取两个无人机之间的距离。实验发....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-17 11:27
•2667次阅读
总的来说,框架实现稳健的数据关联、精确的物体参数化以及基于语义对象地图的高层应用,解决了对象SLAM....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-14 16:49
•1451次阅读

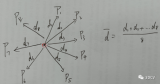
VEnus算法对于反光柱导航的基本思路,其主要分为了高反点提取、高反点聚类查找中心、高反点与已知反光....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-14 15:37
•1468次阅读
作者使用一个多头神经网络来参数化预测的占位概率和流向量。该网络以体素化的LiDAR数据、光栅地图和一....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-12 10:35
•1052次阅读

主要利用点云数据的主轴方向进行配准。首先计算两组点云的协方差矩阵,根据协方差矩阵计算主要的特征分量,....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-10 15:16
•8776次阅读
雷达以用于高级驾驶辅助系统(ADAS)多年。然而,尽管雷达在汽车行业中很流行,考虑到3D目标检测时,....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-10 14:55
•4195次阅读

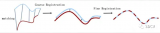
文章采用了统一的B样条(Uniform B-Splines)来建模地面表面,这种方法对于不同的测量密....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-09 15:52
•1477次阅读
根据点云数据的某些属性或特征进行筛选,可以一次删除满足对输入的点云设定的一个或多个条件指标的所有的数....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-09 15:18
•5649次阅读
理解Transformer背后的理论基础,比如自注意力机制(self-attention), 位置编....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-09 14:35
•1083次阅读

越来越多的机器人系统配备了多个惯性测量单元(IMU)。由于竞争性目标,当用于控制时期望靠近重心,或者....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-08 09:41
•3959次阅读

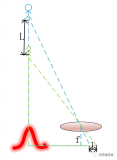
激光雷达根据原理可以分为TOF(飞行时间),三角法测距和相位测距三种方式。 三角法测距为 三角测距法....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-08 09:40
•9085次阅读
在自动驾驶系统中,传感器是系统能感知周围环境的决定性因素。在传感器装车后,需要通过传感器标定消除安装....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-08 09:35
•1446次阅读
在本文中,我们将主要介绍Dijkstra算法和A*算法,从成本计算的角度出发,并逐步展开讨论。 我们....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-07 10:56
•3229次阅读

作者:K.Fire | 来源:3D视觉工坊 在公众号 「3D视觉工坊」 后台,回复「 原论 文 」即....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-07 10:54
•1355次阅读

2019年迁移科技进行天使轮融资时,很多投资人都在问樊钰相同的问题:3D视觉到底是不是伪需求?所谓的....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-06 10:27
•2549次阅读
传统的RGB彩色普通相机称为2D相机,只能拍摄相机视角内的物体,没有物体到相机的距离信息,只能凭感觉....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-06 10:22
•2177次阅读

本篇文章为大家介绍RSPrompter: Learning to Prompt for Remote....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-06 09:08
•3297次阅读

本文介绍了SONICVERSE,这是一个多感官模拟平台,用于训练既能看又能听的家用代理人。该平台在实....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-05 10:20
•1445次阅读

来源:机器之心 SAM (Segment Anything )作为一个视觉的分割基础模型,在短短的 ....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-05 10:18
•2215次阅读

首先,课程介绍了双目相机标定的基础知识。我了解到双目相机是由两个相机组成的系统,通过同时拍摄目标物体....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-03 14:25
•4627次阅读

预训练的2D图像或语言Transformer:作为基础Transformer模型,具有丰富的特征表示....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-03 10:59
•1842次阅读

一种用于新颖未知动态物体的因果 6 自由度姿态跟踪和 3D 重建的新方法。该方法利用了并发跟踪和神经....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-03 10:49
•1488次阅读
对于学术研究而言,LeGo-LOAM是激光SLAM的经典框架,LeGo-LOAM源码简洁清晰,比LO....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 07-03 10:47
•1968次阅读



