 基于LeGo-LOAM框架的3D激光SLAM技术
基于LeGo-LOAM框架的3D激光SLAM技术

激光SLAM很多人都觉得很难,对于初学者更是不知道从哪里开始学起,怎样才能更高效的学习,进入相关企业需要达到什么样的要求,这也是很多初学者面临的难题。如果掌握了3D激光SLAM的核心技术原理,编程能力也过硬,一般企业年薪至少30W起步了。
学习SLAM主要需要攻克三大难关:
扎实的数学基础
对整个SLAM大框架及细节部分理解到一定深度
比较高度的编程能力
这三点都绝非易事,需要花很大的功夫,中间也有不少弯路要走。
对于初学者,推荐以下的学习路线:
先看一遍十四讲入个门,不用看的太深入,应为这会可能会有很多不明白的地方。
查阅相关的硕博论文、综述论文,看看前人的工作部分,再找经典的开源代码过一遍。
学习框架:LeGo-LOAM 、LOAM/A-LOAM、Lio-Sam、cartographer等。
可以尝试做一些实际项目,边做边总结。
做好以上几点基本都差不多了,但是自己学习总是会遇到很多困难。为此,我们与高级科学家弘毅学者一起研发了《深度剖析面向机器人领域的3D激光SLAM技术原理、代码与实战》课程,一方面是带领大家入门基于LeGo-LOAM框架的3D激光SLAM技术,另一方面是带领大家掌握激光SLAM的学习方法。
相对于LOAM算法,LeGo-LAOM能够进行地面优化,同时保证了轻量级;也使用了Keyframe概念以及回环检测位姿图优化的方式对后端进行重构。
对于工业领域而言,LeGo-LOAM有非常广泛的应用,尤其是工业机器人领域,LeGo-LOAM一直都是应聘者必须掌握的框架。
对于学术研究而言,LeGo-LOAM是激光SLAM的经典框架,LeGo-LOAM源码简洁清晰,比LOAM算法的代码可读性要高很多。近几年各顶会上的很多SLAM算法设计思想都潜移默化地受LeGo-LOAM的影响,对其的改进思路相较于LOAM也比较多样化。
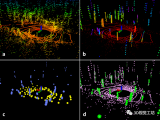
学好LeGo-LOAM,不管是初学激光SLAM还是进阶,都是有意义的。 本课程从必备的数学知识,到算法框架、源码,再到最后的实践,力求衔接清晰,通俗易懂,便于大家消化吸收。 LeGo-LOAM地面优化 LeGO-LOAM运行效果展示: 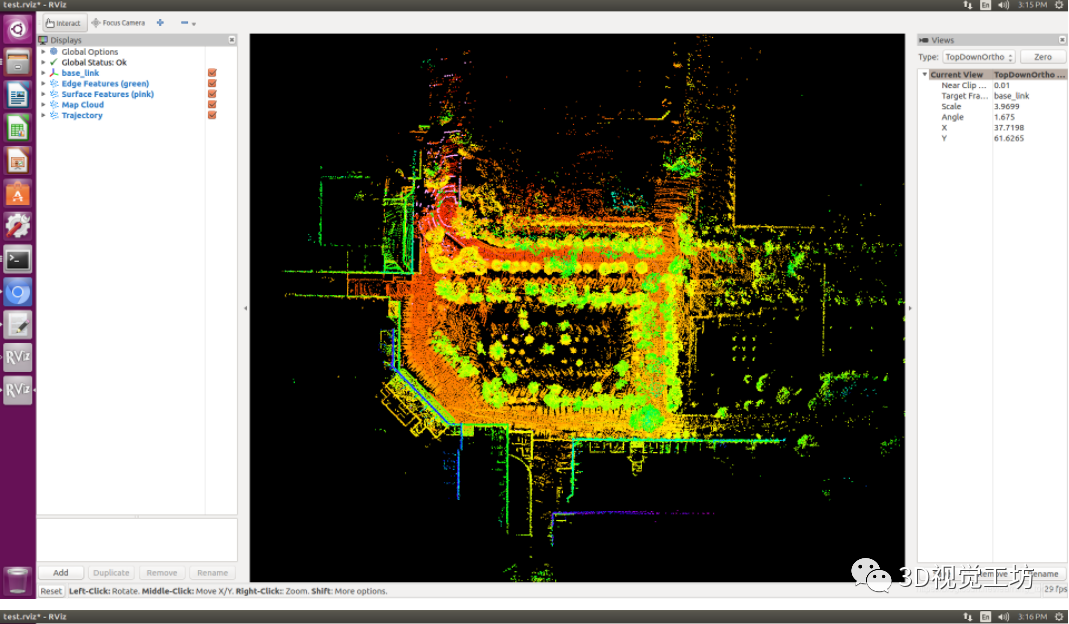
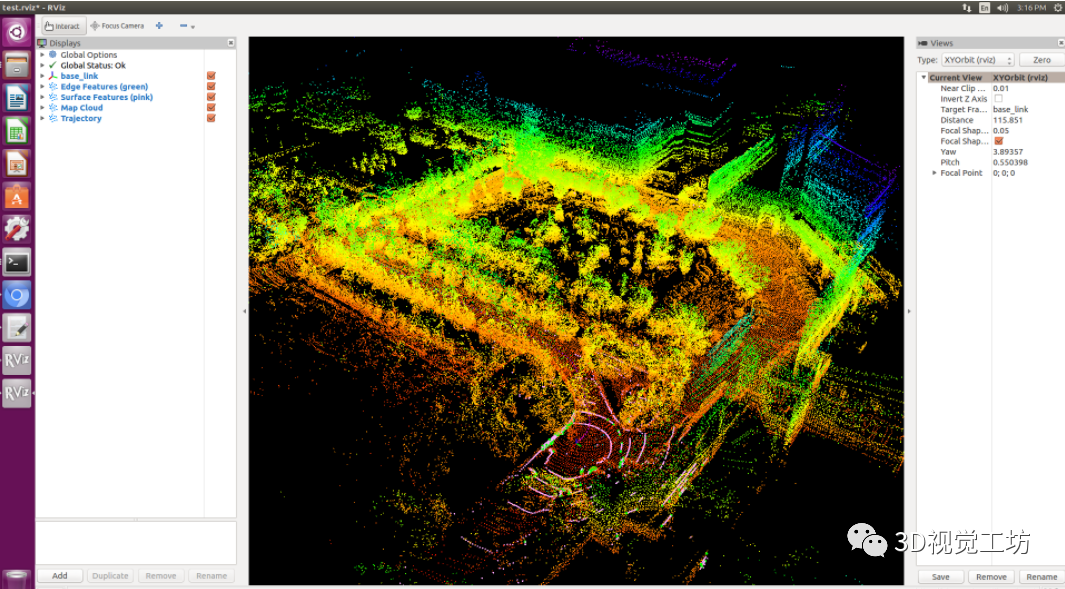
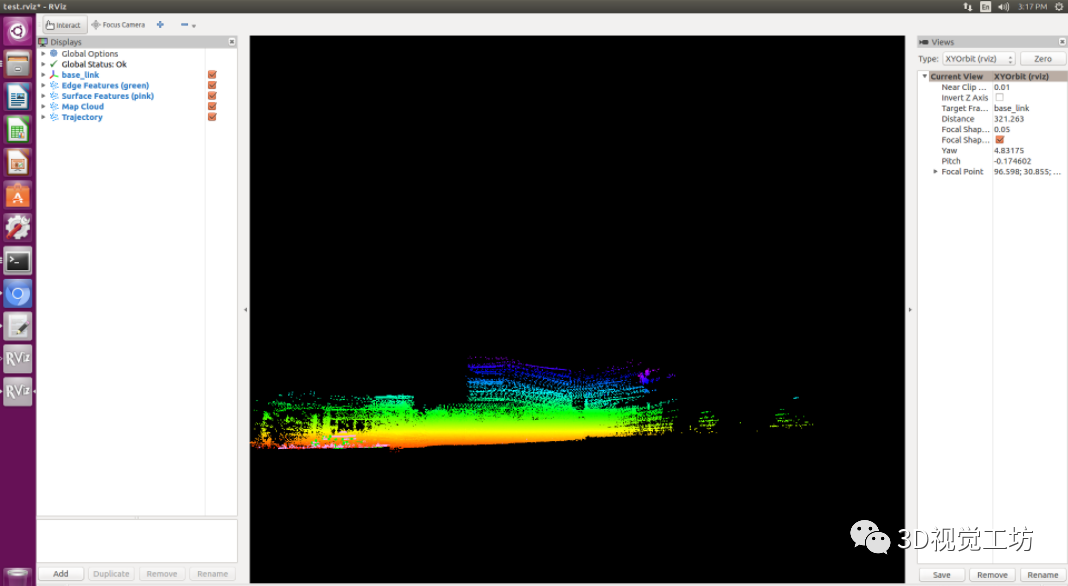 <<< 左右滑动见更多 >>>
<<< 左右滑动见更多 >>>
课程特色
这门课程的推出,一方面是带领大家入门基于LeGo-LOAM框架的3D激光SLAM技术,另一方面是教大家高效的SLAM学习方法。在这门课程中,我们首先会讲述LeGo-LOAM的整体框架,再逐句精讲LeGo-LOAM的源码,真正做到彻底搞懂;另外会把笔者多年总结的激光SLAM常见的面试题、面试技巧分享给大家;也会和大家交流自己的学习过程、经验、以及对SLAM的理解。认真学完本次课程,基本上可以达到企业对于激光SLAM从业者的要求,拿到offer不成问题。
-
激光
+关注
关注
21文章
3710浏览量
69837 -
3D
+关注
关注
9文章
3024浏览量
115595 -
slam技术
+关注
关注
0文章
13浏览量
1746
原文标题:深度剖析面向机器人领域的3D激光SLAM技术原理、代码与实战
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
5 款激光雷达:iDAR、高清3D LiDARInnovizPro、S3、SLAM on Chip、VLS-128
3D激光雷达SLAM技术的应用趋势
测试的SLAM方案
基于自动驾驶汽车记录的3D激光扫描的SLAM闭环问题讨论
用于3D激光雷达SLAM回环检测的实时词袋模型BoW3D
基于LeGo-LOAM框架的激光SLAM技术解析
聊聊3D激光SLAM开源算法-LeGo-LOAM
详解激光SLAM框架LeGO-LOAM
3D激光SLAM是用LOAM还是LeGo-LOAM?

3D激光SLAM,为什么要选LeGo-LOAM?

不同3D激光SLAM方案对比分析
对于3D激光SLAM,LeGo-LOAM到底有多重要?

中强光智能3D激光SLAM无人叉车技术特点详解
什么是激光雷达3D SLAM技术?

基于深度学习的LiDAR SLAM框架(DeepPointMap)




评论