 阵列相机三维重建系统,谁才是顶流?
阵列相机三维重建系统,谁才是顶流?

这是一场3D计算机视觉硬件的革命!普罗米修斯视觉相机矩阵正式登场,为3D计算机视觉数据采集和训练带来了全新的特性和优势。经过清华大学大学和香港科技大学的研究团队十年的努力,这款相机矩阵成为了行业内的明星产品。
普罗米修斯视觉相机矩阵具备多项关键特性,让它在3D计算机视觉领域脱颖而出。
在硬件维度上,它拥有四个强大的模组:同步系统,标定系统,采集+传输系统和存储系统。
毫秒级同步系统:倚赖于普罗米修斯视觉相机矩阵所采用的单片机波形发生器。
这个专门设计的波形发生器能够以极高的精度和稳定性生成各种同步信号。通过精确控制波形发生器,相机模组能够与其他设备在毫秒级的时间尺度上实现完美的同步。这种高精度的同步性能为工业视觉应用带来了无限可能。配合可选配的高速工业全局快门相机模组,无论是在高速运动捕捉、快速事件触发还是多相机系统协同工作中,普罗米修斯视觉相机模组的单片机波形发生器都能够确保每个图像和数据都处于正确的时间轴上。这种精确的时间配合为3D计算机视觉领域带来了更高的精度、可靠性和效率。
亚像素级多相机标定系统
普罗米修斯视觉相机矩阵的全自动亚像素标定解决方案,为多视角视觉应用带来了高度的精度和效率。
该标定过程仅需10分钟,能够自动完成所有校准步骤,无需人工干预。通过该标定解决方案,相机模组能够实现亚像素级别的精度和稳定性。该解决方案采用了先进的全局收敛算法和精密的校准过程,能够消除镜头畸变、颜色偏移和其他图像失真问题,从而提供高精度的图像数据以及匹配的相机内参,相机外参。
万兆网超高速采集+传输系统
该系统采用万兆网架构,从相机输出、传输网络到存储系统输入都使用了万兆网架构,保证了海量数据的采集和传输顺畅无延时,无卡顿。该系统还提供了全程可视化界面,为用户提供了全流程的用户界面,方便实时预览和交互控制。
用户可以通过该界面实时监控采集和传输过程,并进行必要的调整和控制。这种用户友好的界面可以帮助用户更好地管理和控制数据采集和传输过程。
固态硬盘阵列存储系统
这种存储系统是一种高效、可靠的数据存储解决方案。该系统采用工业专用(非消费级)固态硬盘,传输速度快,存储稳定可靠。同时,硬盘阵列系统提供进一步加速的同时,让数据更加安全(多了数据备份设计)。二级存储系统则采用M.2高速固态硬盘采集系统 + 企业级HHD硬盘阵列,既保证高速采集,又确保存储可靠。
除了以上多相机矩阵的硬件基础外,普罗米修斯视觉还提供可选软件包,包括:多视角2D骨骼检测软件包,多视角3D人体姿态拟合软件包,3D人脸重建软件包,深度图和3D点云生成,以及3D动态模型生成。
多视角高精度2D骨骼点检测软件包
该软件包用多个视角的图像数据,结合相机标定参数和投影矩阵,精确检测和跟踪人体骨骼关键点的位置。这种方法适用于多视角拟合,能够提供高精度的骨骼点定位,并且还能够提供置信度,使得检测结果更可靠。这些特点使得该技术在人体姿势识别、运动分析和虚拟现实等领域具有广泛的应用前景。
多视角3D人体姿态拟合软件包
该软件包是通过多视角联合优化和多帧时域联合优化的联合参数拟合技术,精确拟合人体的三维姿态参数。通过结合多视角数据和多帧图像信息,这项技术能够更准确地捕捉和描述人体的姿态和形态特征,为虚拟试衣、运动分析和人体动画等领域提供了强大的工具。支持多种参数模型,包括SMPL,SMPLX等。
3D人脸重建软件包
该软件包使用了计算机视觉和深度学习技术,通过对人脸图像的分析和处理,结合多角度相机的特性,实现对人脸在三维空间中的准确重建和参数拟合的过程。这项技术在人脸识别、虚拟试妆、面部动画等领域具有广泛的应用,能够为数字化人脸建模和虚拟现实技术提供重要支持。
深度图和3D点云软件包
该软件包是使用深度学习的算法,结合IR双目相机的数据,计算出高精度的深度图像和三维点云数据工具集。这些软件包通常包括用于深度图像处理和分析的算法,以及用于三维点云数据获取、可视化和后处理的功能模块。它们在计算机视觉、深度学习训练以及三维重建等领域具有广泛的应用,能够帮助用户有效地处理和分析深度信息,从而实现对人体的三维感知和理解。可以导出PLY,OBJ,STL等常见等数据格式。
高精度动态全身3D模型重建软件包
该软件包提供全身3D模型连续重建,学术名词是体积视频(Volumetric Video,即每秒30帧连续3D静态建模,电影和视频是每秒30帧,连续2D静态照片)。在制作动作中的写实的人这个数字资产任务上,体积视频彻底颠覆了传统的CG制作方式。CG制作需要制作时间长,成本高,品质低(动作僵硬,人也不像),在成本和时间上,体积视频可以降低1~2个数量级。目前普罗米修斯视觉是中国唯一能够提供沉浸式3D体积视频全栈服务的企业,全世界目前也只有个位数的企业掌握这个黑科技。
清华大学和香港科技大学的博士研究团队在普罗米修斯视觉相机矩阵的发展中发挥了重要作用。他们的专业知识和紧密合作使得这款相机矩阵得以不断创新和进化。通过十年的研究和实践,他们成功地将先进的技术与实际应用相结合,为3D视觉领域带来了突破性的解决方案。
普罗米修斯视觉相机矩阵在3D数据采集行业中具有巨大的商业价值和潜力。据悉,这款相机矩阵已经在数十个行业合作伙伴中得到广泛应用,并为他们带来了数千万的利润。这不仅证明了普罗米修斯视觉相机矩阵在市场上的认可度,也展示了它在3D计算机视觉应用中的卓越表现。
审核编辑:黄飞
-
单片机
+关注
关注
6078文章
45579浏览量
673609 -
波形发生器
+关注
关注
3文章
327浏览量
32820 -
传输系统
+关注
关注
0文章
164浏览量
38186 -
计算机视觉
+关注
关注
9文章
1715浏览量
47718 -
三维重建
+关注
关注
0文章
28浏览量
10224
原文标题:阵列相机三维重建系统,谁才是顶流?
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
三维感知赋能千行百业——深度相机的技术解析与应用全景

深度相机:从技术突破到全场景落地,解锁三维感知新可能

双目深度相机:模拟人眼视觉,解锁三维感知新可能

VirtualLab:光学系统的三维可视化
昊衡科技 多芯光纤三维形状传感系统,精准感知!

RTK-SCAM-60双目相机规格书

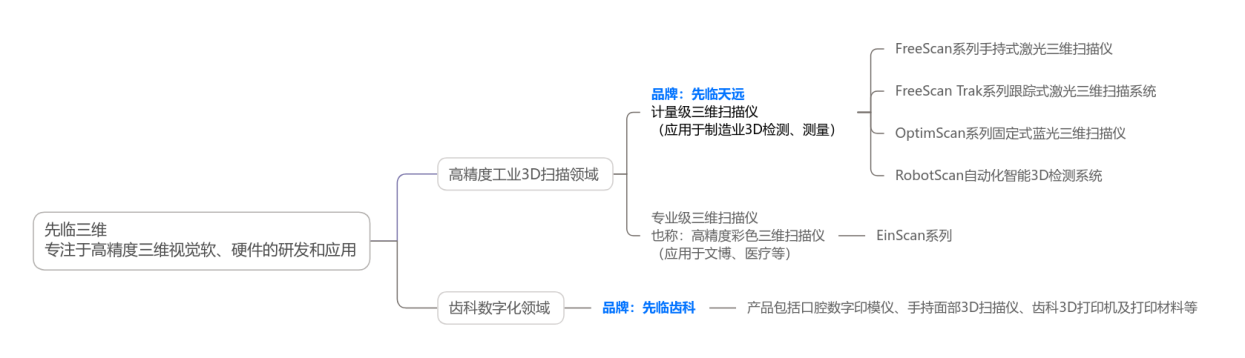
一文读懂 | 三维视觉领域国家级制造业单项冠军——先临三维的品牌布局
从“重建”到“可用”:aiSim3DGS方案如何闭环自动驾驶仿真场景?

一种基于多次观测融合的可交互三维高斯场景重建框架

NVIDIA助力汤元科技突破智能驾驶数据获取与生成瓶颈
航天宏图全栈式3DGS实景三维重建系统解决方案

激光三维扫描技术:无喷粉条件下高反光表面三维重建的光学原理与应用
非接触式激光三维扫描应对镜面反射表面的无喷粉测量方案:原理与创新

VirtualLab:光学系统的三维可视化
三维高斯泼溅大规模视觉SLAM系统解析




评论