 基于NID-SLAM对神经SLAM在动态环境下的性能提升
基于NID-SLAM对神经SLAM在动态环境下的性能提升

1. 写在前面
今天笔者为大家推荐一篇动态环境下视觉SLAM的最新工作,实现了精确的位姿估计,并能建立动态场景下的稠密地图。整个框架基于NeRF实现,可惜算法没有开源,但是这个设计思路可以做为参考。
2. 摘要
神经隐式表示已经被探索用于增强视觉SLAM算法,特别是在提供高保真度的稠密地图方面。现有的方法在静态场景中运行稳健,但与移动物体引起的干扰相抗衡。本文提出了NID - SLAM,显著提高了神经SLAM在动态环境下的性能。我们提出了一种新的方法来增强语义掩码中不准确的区域,特别是边缘区域。利用深度图像中存在的几何信息,该方法能够准确地去除动态物体,从而降低相机漂移的概率。此外,我们引入了针对动态场景的关键帧选择策略,增强了相机对大尺度目标的跟踪鲁棒性,提高了建图效率。在公开的RGB - D数据集上的实验表明,本文方法在动态环境下的跟踪精度和建图质量方面优于竞争性的神经SLAM方法。
3. 效果展示
输入带有动态目标的RGB-D序列,可以生成全局静态地图,这个空洞补全效果很不错。
4. 具体原理是什么?
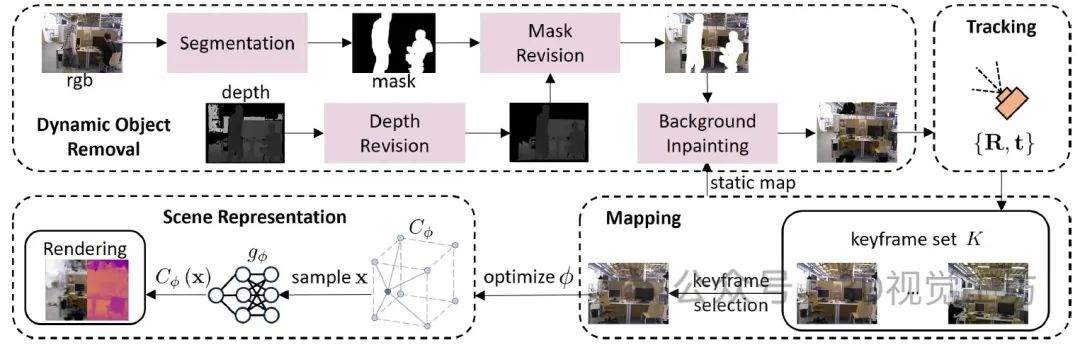
系统概述,包括:1 )动态物体移除:通过语义分割和掩膜修正,精确地移除RGB - D图像中的动态物体,然后彻底地恢复被遮挡的背景。2 ) .跟踪:通过最小化损失来优化相机位姿{ R,t }。3 )建图:采用掩膜引导策略选择关键帧,优化特征网格场景表示。4 )场景表示:通过面聚焦点采样实现预测颜色和深度值的高效绘制。
5. 和其他SOTA方法对比如何?
TUM数据集上相机跟踪结果,评价指标是ATE RMSE [ m ] (↓),表示相关文献未提及这个数据。

TUM数据集动态序列的建图结果。
6. 总结
这篇文章介绍了一种动态RGB-D神经SLAM方法NID - SLAM。证明了神经SLAM能够在动态场景中实现高质量的建图和合理的空洞补全。利用动态物体移除,可以实现稳定的相机跟踪,并创建可重用的静态地图。去除动态物体后准确获得的图像,也可以用于进一步的应用,如机器人导航。
作者也提到了NID -- SLAM的局限性:实时性受限于分割网络的速度,需要实现分割质量和速度之间的平衡。结合神经网络的预测能力,而不是仅仅依靠静态地图,可以得到更全面、更准确的背景修复。
审核编辑:黄飞
-
神经网络
+关注
关注
42文章
4842浏览量
108171 -
SLAM
+关注
关注
24文章
459浏览量
33416
原文标题:来了!NID-SLAM:动态环境也能搞NeRF SLAM!
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
什么是SLAM?视觉SLAM怎么实现?


AGV激光雷达SLAM定位导航技术
SLAM技术的应用及发展现状
让机器人完美建图的SLAM 3.0到底是何方神圣?
SLAM大法之回环检测
激光SLAM与VSLAM定位导航方法谁主沉浮?
SLAM技术目前主要应用在哪些领域
激光SLAM与视觉SLAM有什么区别?
SLAM的相关知识点分享

视觉SLAM是什么?视觉SLAM的工作原理 视觉SLAM框架解读

一种适用于动态环境的3DGS-SLAM系统

一种适用于动态环境的实时RGB-D SLAM系统




评论