 汉思新材料:人形机器人底部填充胶(Underfill)应用指南
汉思新材料:人形机器人底部填充胶(Underfill)应用指南

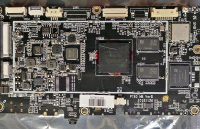
人形机器人结构复杂、运动剧烈,其早期故障中超过60%与焊点失效相关,而底部填充胶(Underfill)应用不当是主要原因之一。通过在关键芯片底部填充特种胶水,可大幅提升焊点抗振动、抗冲击、抗热应力能力,从而显著降低故障率、延长使用寿命。
典型元件:BGA/CSP封装的主控芯片、AI推理芯片、存储器。
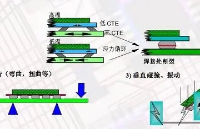
失效风险:芯片与PCB热膨胀系数(CTE)差异大,加上整机振动,焊点易因热应力与机械应力疲劳开裂。
实测数据:未填充的芯片在500次高低温循环后焊点开裂率超62%。
实操建议:
选用高流动性、低CTE、高Tg(玻璃化转变温度)的底部填充胶;
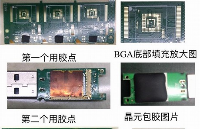
环绕芯片边缘均匀点胶,利用毛细作用完整填充;
采用分段固化,减少内应力。
二、关节伺服驱动芯片底部——高振动核心区
典型元件:肩、肘、腕、髋、膝、踝等关节中的BGA驱动芯片。
失效风险:关节高频运动产生持续振动与冲击,焊点极易疲劳断裂,导致关节卡顿、力矩异常。
案例佐证:某双足机器人膝关节抖动,排查确认为驱动芯片焊点开裂,补胶后问题解决。
实操建议:
选用高韧性、高断裂伸长率的底部填充胶;
确保胶体覆盖全部焊点,不留死角;
控制胶层厚度,避免影响关节灵活性。
三、力矩/位置传感器芯片底部——精准控制的关键
典型元件:关节力矩传感器、编码器、位置传感器芯片。
失效风险:焊点微小密集,对振动与热应力极度敏感,一旦松动将导致动作失准、力矩漂移。
实操建议:
使用低粘度、低应力、高精度型底部填充胶;
精准控制胶量,避免溢胶遮挡感应区域;
固化后进行高低温与功能测试,确保信号稳定。
四、视觉与环境感知芯片底部——机器人的“眼睛”
典型元件:双目视觉芯片、深度摄像头处理芯片、红外避障芯片。
失效风险:安装位置运动频繁,且长期工作发热,热应力集中,易导致识别延迟、画面抖动。
案例佐证:某品牌机器人视觉卡顿,确认为视觉芯片焊点热裂,补胶后恢复。
实操建议:
选用柔韧性好、低应力的底部填充胶;
沿芯片四周均匀施胶;
严防胶水污染光学元件。
典型元件:电源管理IC、电池保护芯片、功率MOS管。
失效风险:大电流、高频开关导致剧烈温变,叠加机身振动,焊点故障率比涂胶产品高3–5倍。
实操建议:
选用导热型、阻燃型底部填充胶,辅助散热;
全面覆盖功率器件区域;
耐温范围建议满足 -40℃~125℃。
六、柔性电子皮肤与躯干控制板——新兴与中枢区域
典型元件:
柔性电子皮肤中的传感器阵列与柔性电路板连接点;
失效风险:
电子皮肤反复拉伸弯曲,焊点易疲劳;
躯干控制板虽负载不高,但长期低频振动仍致焊点失效。
实操建议:
电子皮肤:使用柔性、可拉伸的底部填充胶,随皮肤形变不开裂;
躯干控制板:采用通用型底部填充胶,批量生产建议自动化点胶,固化后进行振动测试验证。
总结:6大必涂部位一览表
部位 | 典型元件 | 主要风险 | 用胶建议 |
主控芯片 | CPU、AI芯片、存储器 | 热应力+振动 | 高Tg、低CTE、高流动性 |
关节驱动芯片 | BGA伺服驱动IC | 高频振动、冲击 | 高韧性、抗弯折 |
传感器芯片 | 力矩/位置传感器 | 微小振动、精度敏感 | 低粘度、低应力 |
视觉芯片 | 摄像头、深度传感器 | 热循环+运动振动 | 柔韧、低污染风险 |
电源管理芯片 | 电源IC、MOS管 | 高热+振动 | 导热、阻燃、宽温域 |
柔性皮肤/躯干板 | 柔性传感器、控制IC | 拉伸疲劳/低频振动 | 柔性胶 / 通用型胶 |
最后提醒
省胶=省命:一颗芯片几十元,一点胶几毛钱,但焊点失效可能导致整板报废、售后成本飙升。
测试验证不可少:打样阶段务必进行振动、跌落、高低温循环测试,并用显微镜检查焊点。
工艺规范是关键:点胶路径、胶量、固化曲线需严格按胶水厂商建议执行,避免气泡、空洞、固化不全。
找准位置、选对胶水、规范施工——这6个部位做好底部填充,人形机器人的可靠性将实现质的飞跃。
-
芯片
+关注
关注
463文章
54377浏览量
468987 -
人形机器人
+关注
关注
7文章
1043浏览量
18541
发布评论请先 登录

汉思新材料:智能运动手表主板芯片底部填充包封用胶方案



汉思HS700系列underfill胶水芯片底部填充胶

汉思新材料:车规级芯片底部填充胶守护你的智能汽车


汉思新材料取得一种封装芯片高可靠底部填充胶及其制备方法的专利







评论