PID 控制算法是比例(Proportional)- 积分(Integral)- 微分(Derivative) 控制的简称,是工业控制、嵌入式系统中最经典、应用最广泛的闭环控制算法。它的核心
2026-01-05 16:27:14 469
469 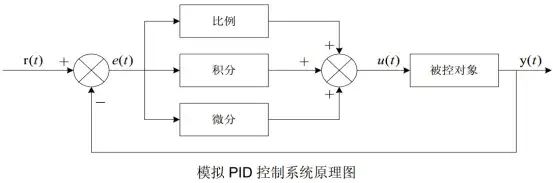
本文为创龙科技DR1M90 评估板的 IgH EtherCAT 主站应用案例,基于 Linux-RT 内核与开源协议栈,实现伺服电机正反转实时控制。案例通讯周期 1ms,支持电机 0-10000(正
2026-01-04 15:40:0365 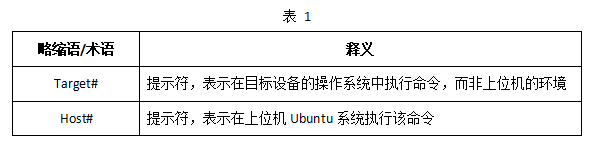
电机(简称HB)。
步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定。
步进电机的驱动电路根据控制信号工
2026-01-04 08:25:51
工作原理、调速分类及技术特点三个维度展开系统阐述。 一、交流伺服电机的工作原理与结构特性 交流伺服电机本质上是一种采用闭环控制的交流电动机,其运行机理基于电磁感应定律。定子绕组通入三相交流电后产生旋转磁场,带动
2025-12-13 07:37:34200 
TMC4671:硬件实现FOC伺服控制要“集成+灵活”?做伺服项目时,大家总希望芯片既能装下核心功能,又能应对不同电机需求——而TMC4671这款完全集成的伺服控制芯片,刚好踩中了“集成”与“灵活
2025-12-10 17:48:28164 
伺服电机增益调节是运动控制中的核心环节,直接影响系统的响应速度、稳定性和精度。本文将深入解析增益参数的作用机理、调节方法及典型应用场景,帮助工程师实现伺服系统的最佳性能匹配。 一、增益参数
2025-12-08 07:42:00614 。本文将从基础原理到前沿技术,系统梳理伺服电机的控制方式及其应用特点。 一、伺服控制的基本架构 伺服系统由伺服电机、驱动器、控制器和反馈装置构成闭环控制回路。其核心是通过实时比较目标指令与反馈信号的偏差,采用PID算
2025-12-01 07:37:18429 
伺服系统,通过稳定传输特性消除连接环节对精准控制的干扰,成为伺服控制系统的可靠支撑。动力线保障电能稳定传输伺服动力线作为伺服驱动器与电机的电能传输载体,其稳定性直接
2025-11-28 08:03:33529 
同步电机控制方式及驱动技巧永磁同步电机在工业上用的相对较多。永磁交流伺服电机系统具有以下等优点:
电动机无电刷和换向器,工作可靠,维护和保养简单;
定子绕组散热快;
惯量小,易提高系统的快速性;
适应
2025-11-27 08:04:21
今天继续为大家介绍i.MX RT1180实现EtherCAT+伺服控制的终极实践:双电机控制与Ethercat资源使用。
2025-11-26 08:19:003706 
Parker提供了多款不同的伺服电机,性能各有不同,针对特定易燃易爆场所使用的防爆伺服电机,与普通通用伺服电机存在诸多区别,接下来就进一步看看Parker防爆伺服电机与普通伺服电机的区别
2025-11-20 13:36:27266 
上回我们介绍了EtherCAT是如何利用SSC产生的sync信号,与电机控制系统完成同步的,如此我们即可保证整个控制系统的同步性能伺服控制。在此基础上,伺服电机的实时精确控制要求电机控制系统具有较高的响应带宽,其中,电机的电流环路设计对于系统带宽的提升,扮演着至关重要的角色。
2025-11-17 09:53:297032 
换向电路,使用50mΩ的分流电阻构成母线电流检测电路。
采用反电动势法,对各相来对电机的位置进行检测,通过过零检测确定转子的位置,实现电机的无感闭环控制。
MCU使用的是CW32L010F8U6,片
2025-11-17 07:39:26
自身完成速度闭环控制计算。本实例没有使用任何专用程序块,由于对报文结构比较熟悉,直接利用报文的控制字和状态字通过I/O地址编程进行控制。
2025-11-12 14:20:544038 
舵机伺服编码器是用于实时检测舵机输出轴位置、速度或角度的核心反馈元件,它能将机械运动转化为电信号,让控制系统实现对舵机的精准闭环控制。 这个问题切得很准,它直接指向了舵机 “精准控制” 的关键所在
2025-10-30 10:05:00174 脉动小、更加平稳顺滑,因此广泛应用于对控制性能要求高的场合,如工业伺服系统、电动汽车驱动等。
二、 核心控制算法解析
六步换相法
l原理: 一种简单直接的控制方法。它将电机的电周期分为六个区间
2025-10-27 09:23:06
大家在运动控制的时候是用伺服电机的还是用步进电机做定位控制了?为什么有时候用伺服电机,有时候又步进电机?这是什么原因呢?本期我们就一起来探讨一下步进电机和伺服电机的区别!
2025-10-15 14:32:511496 
舵机与伺服电机都属于 可精确控制的驱动装置 ,但二者在定义范围、结构组成、控制方式和应用场景上存在显著差异,并非完全等同(舵机是伺服电机的 “特殊子集”)。以下从核心维度展开对比,帮助清晰区分: 一
2025-10-13 10:21:071171 前言在工业自动化控制、智能制造设备及新能源等领域对精密运动控制需求激增的背景下——2025年中国伺服系统市场规模将突破300亿元,2030年更有望达到500亿元,年复合增长率超10%——传统的伺服
2025-10-09 16:12:43686 
电液伺服系统是现代工业控制领域的一项关键技术,它将电子控制的灵活性与液压系统的高功率密度完美结合,形成了一种响应速度快、控制精度高的闭环控制系统。这类系统由电信号处理装置和液压动力机构组成,通过反馈
2025-09-25 11:15:46449 
电动静液作动器(EHA)以其高精度、高动态响应的机电液一体化闭环控制,成为飞行器舵面、机器人关节等尖端领域的“心脏”。然而,这份卓越性能的背后,是高昂成本的现实:精密伺服电机、高性能变量泵、高精度
2025-09-25 11:05:38630 算法实现精准控制的关键环节。传统的开环电流传感器存在精度不足、温漂大、动态响应慢等问题,难以满足现代工业对高效、安全、智能化的需求。在这种情况下,CR1V闭环霍尔
2025-09-22 14:01:31829 
我用labview FPGA来进行直线电机闭环控制,控制器是cRIO 9049 ,ni 9234输入,ni 9263输出,一直会有一个很大的延时,将输入换成ni 9205延时减小了一点,但依旧存在,这是为什么呢?
2025-09-21 22:19:59
伺服电机作为自动化控制系统中执行元件的核心部件,其制动性能直接影响设备的定位精度和安全可靠性。目前主流的伺服电机制动方式包括动态制动、再生制动和电磁机械制动三种,它们在制动原理、应用场景及技术特点上
2025-09-19 18:26:111302 
介绍基于单颗i.MX RT1180芯片的EtherCAT+伺服电机控制方案-伺服控制板硬件电路资源介绍,即为下图中的Servo Motor Driver Board。
2025-09-11 14:27:5974795 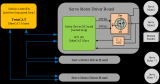
精密仪器控制领域,步进电机因其结构简单、控制方便、成本低廉等优势被广泛应用。然而,传统开环控制的步进电机存在失步、振动、噪声等问题,难以满足高精度应用场景的需求。闭环控制技术的引入为步进电机性能提升
2025-08-29 17:22:081053 基于MT6835磁编码器IC的步进电机全闭环伺服控制策略,通过引入高精度位置反馈和先进控制算法,实现步进电机性能的显著提升。
2025-08-27 17:55:08843 在自动控制系统中,开环控制、半闭环控制和闭环控制是三种基础的控制方式,它们以不同的信息处理机制实现系统调节,广泛应用于工业自动化、机器人、数控机床等领域。理解这三者的原理及差异,对优化控制
2025-08-25 07:39:003068 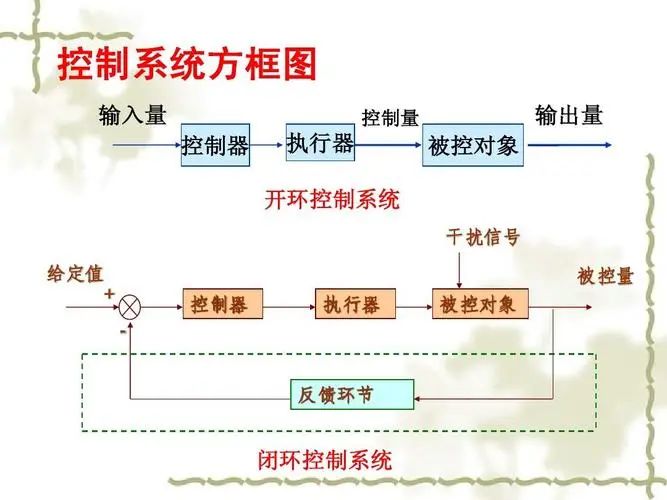
,但先从反馈说起。构建稳定精确系统需建立控制系统,监测被调节变量并与参考值比较,偏差产生误差信号,经补偿器驱动功率级,形成闭环控制。闭环表达式中,环路增益T(s)=G(s)C(s),频域里开环增益在穿越
2025-08-21 12:00:02
变化器在开环工作条件下的表现。并给出了开环表达式。如果学过自动控制理论,相信很容易得出表达式。如果没学过,建议去看一看,不然后面会有很多疑惑的。
2、反馈
此处引入了反馈的概念。并给出了一个典型的闭环控制
2025-08-16 17:54:13
突破性解决方案。该芯片通过创新的磁感应技术和信号处理架构,实现了对电机转子位置的高速、高精度检测,从而显著优化了伺服系统的闭环控制性能。
2025-08-15 17:37:01823 及注意事项展开说明: 一、舵机控制的核心原理 舵机内部集成了 直流电机、减速齿轮组、电位器(角度传感器)和控制电路 ,形成闭环控制系统: 信号接收 :外部输入 PWM 信号,控制电路解析信号中的脉冲宽度,确定目标角度。 反馈对比
2025-08-15 10:23:511783 在工业自动化和精密控制领域,步进电机因其开环控制简单、成本低廉等优势被广泛应用,但其固有的失步、振动和噪音问题始终困扰着工程师。随着高精度应用场景的不断涌现,传统步进电机的性能瓶颈日益凸显。而麦歌恩
2025-08-12 17:26:35838 、强振动、多粉尘等恶劣环境下存在明显局限性。近年来,MT6835高速磁编码技术的出现,为下一代伺服电机闭环控制提供了全新的解决方案,其非接触式测量、抗干扰能力强、体积小巧等优势,正在推动伺服控制技术迈向新的高度。
2025-08-05 17:44:44859 在工业自动化、机器人技术以及新能源汽车等众多领域,伺服电机控制系统都扮演着至关重要的角色。而测量电机的旋转角度,对于实现精确的运动控制起着决定性作用。今天,我们就来深入探讨一下MT6825磁编芯片如何为伺服电机控制系统带来全角度测量能力。
2025-07-29 16:40:39525 在工业自动化的浪潮中,步进电机作为一种将电脉冲信号转换为角位移或线位移的执行机构,被广泛应用于各种自动化设备中。而闭环步进电机控制系统更是近年来的热门技术,它能够有效解决传统开环步进电机存在的丢步
2025-07-28 17:30:18601 伺服电机作为工业自动化、机器人、数控机床等高端装备的核心执行部件,其控制精度直接影响设备性能。传统光电编码器受限于机械结构易磨损、抗干扰能力弱等问题,难以满足高精度场景需求。而MT6825磁编码器
2025-07-28 17:20:50587 
伺服电机的运行需要一个参考点,这个参考点就是原点。原点通常是由光电开关或机械开关来确定的,其位置是固定的。当伺服电机运行时,控制器会根据原点的位置来计算电机的位置。如果没有原点,控制器就无法确定电机的位置,从而无法精确地控制机器的运动。
2025-07-26 09:43:403012 
在工业自动化、智能设备等领域不断发展的当下,闭环步进电机控制系统凭借其精准的控制性能和稳定的运行状态,正发挥着越来越重要的作用。而MT6835磁编芯片的出现,为闭环步进电机控制系统带来了全新的发展契机,助力其进入一个崭新时代。
2025-07-24 17:02:02515 在当今工业自动化飞速发展的时代,伺服电机控制系统作为众多设备的核心动力源,其性能的优劣直接影响着整个工业生产的效率和质量。而磁编芯片作为伺服电机控制系统中的关键组件,对于实现精确的角度测量和控制起着
2025-07-24 16:52:25607 ,控制精度较差。针对上述不足,设计了一种三相无刷直流电机的控制系统。以意法半导体的STM32FI03VET6 为控制器,采用由电流环和转速环构成的双闭环控制系统,其中转速环采用模糊 PID 算法,电流
2025-07-23 13:28:30
【摘要】建立了线控转向系统机械路感模拟和直流无刷电机的数学模型。针对线控转向系统需要直流无刷电机响应快、鲁性高的要求,采用双闭环控制策略,其中电流环采用PID控制,转角环采用滑膜变结构控制。通过
2025-07-15 15:22:48
解析。 一、核心原理与技术架构差异 1. 控制对象本质不同 伺服系统采用闭环控制,通过编码器实时反馈电机转速、位置等参数,形成高精度闭环调节。其核心由伺服电机(通常为永磁同步电机)、高分辨率编码器(17位以上)和专用
2025-07-13 16:30:021698 
纯分享帖,点击下方附件免费获取完整资料~~~
*附件:无刷直流电机双闭环模糊自适应控制方法研究.pdf
【免责声明】本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,删除内容,谢谢!
2025-07-08 18:35:22
摘 要:为了便于对无刷直流电机的运行特性和控制策略的研究,文章详细的介绍了无刷直流电机工作原理和数学模型,提出无刷直流电机的控制策略,采用电流环为内环,速度环为外环的双闭环控制,并根据数学模型搭建
2025-07-08 18:33:31
以来伴随着永磁材料技术、计算机及控制技术等支撑技术的快速发展及微电机制造工艺水平的不断提高,永磁无刷直流电动机在高性能中、小伺服驱动领域获得广泛应用并日趋占据主导地位吗。一直以来,研究人员都比较关注利用
2025-07-07 18:36:01
摘 要:从无刷直流电机(BIDCM)的工作原理和结构出发,在分析了 BLDCM数学模型的基础上,采用模块化方法,在Matlab/Simulink 中建立了 BLDCM 转速、电流双闭环控制系统模型
2025-07-07 18:25:26
摘要:分析了BLDCM的数学模型,运用MATLAB仿真软件搭建了无刷直流电机控制系统的仿真模型。本系统采用了速度PID控制、电流迟滞控制的双闭环控制方案,电流迟滞控制是为了更方便地跟踪PWM信号并
2025-06-27 16:52:53
[摘要]为使无刷直流电机电动汽车在冰雪等低附着路面上进行纯再生制动时,驱动轮仍具有防抱死功能采用了双闭环控制策略。文中首先阐述了双管调制下的无刷直流电机再生制动机理;提出了通过控制PWM 占空比
2025-06-26 13:43:24
PLC与伺服控制在控制对象、控制方式、硬件结构、应用场景、系统精度与灵活性等方面存在显著区别,以下是具体分析: 控制对象 PLC:适用于逻辑控制、运动控制、流程控制等,可对生产线、机械设备等进行整体
2025-06-25 17:54:091120 在高速扫描仪的进纸系统中,双闭环FOC(磁场定向控制)的BLDC(无刷直流电机)驱动板是实现高精度定位与抖动抑制的核心技术之一该系统通过电流环与速度环的双闭环控制结构,结合先进的控制算法,显著提升
2025-06-25 17:41:25604 AB PLC与编码器通过EthernetIP转CAN通讯的完整应用案例 一、项目背景与需求 某自动化生产线需实现伺服轴的高精度位置检测,采用 AB CompactLogix 5000 系列 PLC
2025-06-21 13:09:251139 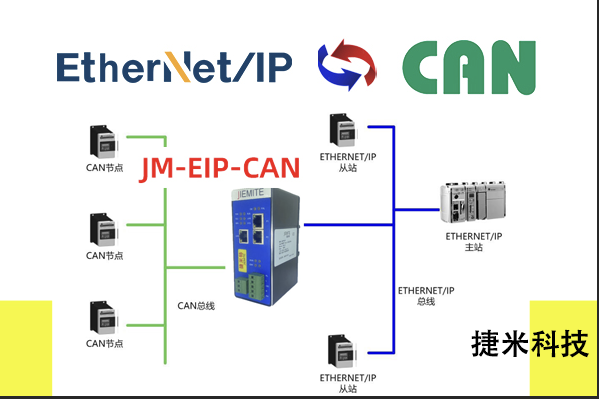
摘要:介绍了一种数字液压阀及其控制系统,该阀采用了伺服阀的滑阀部分,驱动和反馈采用了何服电机来执行,可以进行位移闭环控制和力闭环控制,功能上完全可以替代电液伺服阀:频响可以达到200Hz(如果伺服
2025-06-19 10:59:58
不同
步进电机开环控制无反馈;伺服电机闭环控制能直接对电机编码器反馈信号进行采样,性能更为可靠
过载能力不同
步进电机一般不具有过载能力启动频率过高或者负载过大的时候容易丢失;伺服电机的过载能力是比较
2025-06-18 13:27:36
Ω的分流电阻构成母线电流检测电路。
采用反电动势法,对各相来对电机的位置进行检测,通过过零检测确定转子的位置,实现电机的无感闭环控制。
MCU使用的是CW32L010F8U6,片上有4KBSRAM
2025-06-13 18:12:21
电压定向的电压、电流双闭环控制策略:其次推导了绕线异步电机双馈运行时的数学模型,提出了基于定子电压定向的转速、电流双闭环转子侧PWM 变换器的控制策略:最后搭建了基于英飞凌XC2785X的双馈调速系统
2025-06-12 13:43:03
这些指令主要是针对用 PLC 直接联动伺服放大器,目的是可以不借助其他扩展设备(例如1GM 模块)来进行简单的点位控制, 使用这些指令时最好配合三菱的伺服放大器 (如 MR-J2)。然而,我们也可以用这些指令来控制步进电机的运行,下面我们来了解相关指令的用法。
2025-06-12 10:33:511721 
什么是伺服电机编码器?
伺服电机编码器是伺服系统中的核心反馈元件,用于实时检测电机的转速、位置、角度等参数,并将信号反馈给控制器(如伺服驱动器),形成闭环控制,确保电机运动的精准性和稳定性。
其
2025-06-09 11:07:312334 
1.1 控制电机、特种电机和传统电机的区别
在各类自动化系统中,需要用到大量的各种各样的元件,控制电机就是其中的重要元件之一。它属于机电元件,在系统中具有执行、检测和解算的功能。虽然从基本原理来说
2025-06-06 14:07:12
无速度传感器矢量控制技术能够有效提高交流传动系统的可靠性,降低系统成本。该技术的核心问题是准确获取电机转子转速,并将其反馈到速度闭环控制环节。介绍一种采用改进模型参考自适应转速估计方法的异步电机矢量控制
2025-05-28 15:43:39
概述本文主要介绍BLDC电机控制的实现原理,还介绍了3类直流电机的工作方式以及控制的特点。从简单的钻机到复杂的工业机器人,许多机器设备都使用无刷直流电机将电能转换为旋转运动。掌握直流电机的控制是实现
2025-05-26 19:33:514531 
伺服系统的使用场合 伺服系统以其高精度、高动态响应和闭环控制特性,广泛应用于需要精确运动控制的领域。以下是典型应用场景及案例说明: 1. 工业自动化与智能制造 数控机床(CNC) 场景 :金属切削
2025-05-26 09:26:27984 单片机和伺服的区别 单片机(Microcontroller)和伺服(Servo System)是两种完全不同的技术概念,分别属于 控制系统硬件 和 运动控制执行系统 。以下是它们的详细对比和区别
2025-05-26 09:18:22664 伺服系统和PLC(可编程逻辑控制器)在工业自动化中扮演不同角色,主要区别体现在功能、结构、应用场景和控制方式上,以下是具体分析: 功能 伺服系统:是一种特殊的运动控制系统,主要功能是实现高精度的运动
2025-05-23 17:53:52874 与环境磁能采集架构,系统在无需外部供电条件下实现连续运行,并支持±0.003°角度重复性精度。实验表明,该方案在微型电机闭环控制中能耗降低98%,定位稳定性提升5倍,为植入式医疗设备、微型机器人等场景提供了创新解决方案。
2025-05-23 17:24:15668 文档详细介绍了控制系统历程、控制系统概况、反馈控制原理图、闭环控制系统的例子等内容,具体的建议下载查看。
这是部分截图:
2025-05-22 17:37:16
通用 I/O 模块提供了实现软件控制的基本功能。通过软件算法实现PID闭环控制,不需要使用外部PWM发生器和昂贵的电流检测器件,这样不仅提高了效率且最终可降低应用的总成本。
概述
图 1 为应用软件
2025-05-14 15:56:36
。简化的闭环控制系统框图如图1所示,被控对象的传递函数为H,反馈部分的传递函数为G。 图1 以上各式中的GH一般称为系统的环路增益或者开环增益。
纯分享贴,有需要可以直接下载附件获取完整文档!
(如果内容有帮助可以关注、点赞、评论支持一下哦~)
2025-04-28 17:02:43
伺服电机过热故障是工业控制领域中常见的问题,为了有效应对这一故障,可以采取以下措施: 一、检查散热系统 ● 散热风扇与散热片:首先检查伺服电机的散热风扇和散热片是否正常工作。散热风扇负责将电机
2025-04-23 17:04:051978 本书共13章。第1章绪论,介绍国内外电机控制专用集成电路发展情况,电机控制和运动控制、智能功率集成电路概况,典型闭环控制系统可以集成的部分和要求。第2~7章,分别叙述直流电动机、无刷直流电动机、步进
2025-04-22 17:02:31
高效能图腾柱无桥PFC闭环控制方案——为EE工程师量身打造的革新设计 *附件:图腾柱无桥PFC(功率因数校正)电路的三种闭环控制方法.pdf 在服务器和数据中心等高功率密度场景中, 图腾柱无桥PFC
2025-03-24 20:53:512319 永磁同步电动机(PMSM)开环控制的变频调速系统,作为现代电力传动技术的重要组成部分,在工业自动化、电力设备、交通运输等领域展现出了广泛的应用前景。该系统通过变频器对电机供电频率的调节,实现对电机
2025-03-24 07:35:461103 这篇文章主要介绍了使用EtherCAN转CANopen网关控制伺服电机的步骤,包括配置软件、创建新工程、搜索设备、添加主站设备、导入EDS文件、添加从站设备、设置参数、生成和下载。文章最后介绍了在线监控和I/O功能映射的功能。
2025-03-23 17:30:30672 
带速度传感器矢量控制与闭环v/f控制之间存在显著的差异,这些差异主要体现在控制原理、控制精度、启动转矩、安装方式、编码器选型以及编码器断线停机方式等多个方面。以下是具体的比较: 一、控制
2025-03-23 07:42:40941 开源闭环步进电机控制器(原理图+源代码),采用PID算法控制,AS5047磁性角度检测传感器,高效防失步,快速学习PIDS算法,掌握单片机系统开发。
纯分享贴,有需要可以直接下载附件获取资料!
(如果内容有帮助可以关注、点赞、评论支持一下哦~)
2025-03-20 13:32:11
电枢电流构成电流环。软件编程实现改进的转速、电流双闭环PI控 制器,利用单片机的定时器生成占空比可调的PWM信号,光耦隔离后经功率驱动放大,通过 控制H桥驱动电路对直流电机进行无级平滑调速。实验表明该系统控制精度高,可靠性和稳定 性加强。
全文点击下方附件查看*附件:直流电机双闭环数字调速系统设计与实现.pdf
2025-03-20 12:55:42
要将三菱伺服电机设置为无编码器模式(也称为开环控制模式),需要遵循一定的步骤和注意事项。以下是一个详细的指南: 一、了解无编码器模式 无编码器模式是指伺服电机在没有编码器反馈信号的情况下,根据输入
2025-03-20 07:41:441328 为了改善永磁同步直线电机在数控珩磨机主轴往复运动时的伺服性能,建立了永磁同步直线电机的数学模型。 通过对直线电机运动系统数学模型进行分析,得出系统参数摄动、推力波动、负载扰动等不确定因素是造成控制
2025-03-12 17:07:48
、多个阶段的响应问题以及难以调整的问题上表现得并不理想。因此,我们发现在某些情况下,甚至比开环控制更差。而如果单纯使用开环控制就要求液压系统非常精确地控制模型,这在工程上是很难做到的。本研究基于直流无刷
2025-03-07 14:52:23
目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。同时,控制理论的发展也经历了古典控制理论、现代控制理论和智能控制理论三个阶段。自动控制系统可分为开环控制系统和闭环控制系统。一个控制
2025-02-26 15:22:16
器的指令,通过精确控制伺服电动机的转速、位置和力矩,实现对机械系统的精确控制。它通常具有高性能的电流、速度和位置闭环控制系统,以确保电动机的稳定运行和精确控制。 二、常见故障及解决方案 电源故障 故
2025-02-22 10:51:19958 伺服驱动器的主要作用是控制伺服电机,实现高精度的传动系统定位 。 伺服驱动器,又称为“伺服控制器”或“伺服放大器”,是现代运动控制的重要组成部分。它通过接收外部控制信号,对伺服电机进行精确的速度
2025-02-20 10:06:132912
工业机器人数控机床XY机械手双轴机器人堆垛机专用双轴伺服电机驱动控制器48V 14ARMS带有STO功能,隔离高压CAN/RS485/USB通讯支持编码器和霍尔输入- TMCM-2611
双伺服
2025-02-15 12:14:19
电气控制、机械调整和软件编程三个方面。 一、电气控制 伺服电机的电气控制是改变电机方向的主要方法之一。伺服电机通常采用三相交流电供电,通过改变供电相序,可以实现电机的正反转。具体步骤如下: 1.1 断开电源:在进行电气控
2025-02-12 11:07:522633 【电磁兼容技术案例分享】伺服控制器产品电机抖动EMC自兼容问题案例
2025-02-11 09:40:25908 
舵机和伺服电机在自动化和机器人技术领域中都是常用的执行器,它们都能够实现精确的位置控制,但二者之间存在一些基本的区别,具体如下: 一、定义与构成 1. 舵机
2025-02-07 07:37:411933 
一、产品简述 MS39531N 是一款正弦驱动的三相无感直流电机驱动器,具有最小振动和高效率的特点。该驱动器内部集成了基本的闭环速度控制功 能,能够根据特定的应用定制电机速度曲线,可脱离
2025-02-06 15:24:42855 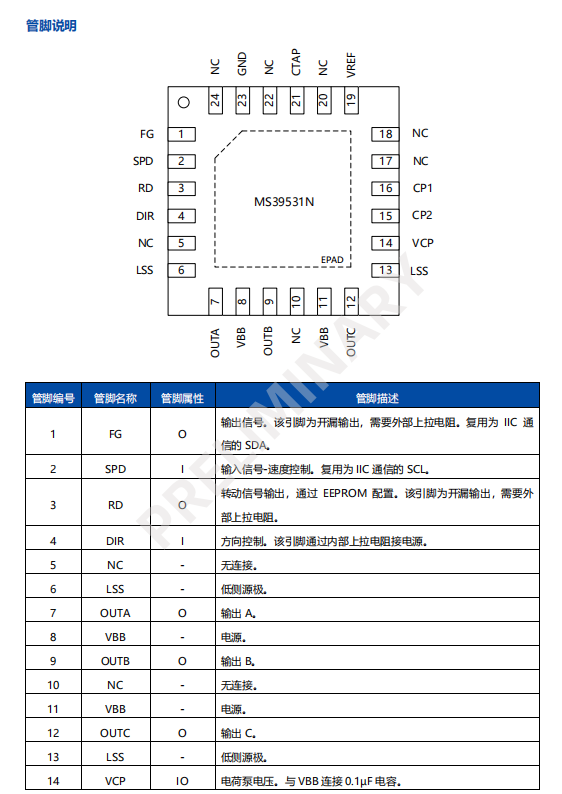
绝对式编码器在伺服电机控制中的应用广泛且重要,其优势显著,以下是对其应用与优势的详细分析: 一、绝对式编码器在伺服电机控制中的应用 绝对式编码器是一种常用的位置
2025-02-06 09:46:151722 
高压伺服控制器的工作原理基于反馈控制原理,通过不断比较指令信号和反馈信号,计算出偏差信号,并据此调整控制信号,使被控对象的运动状态逐渐接近指令信号所要求的状态。
2025-02-03 15:21:001197 的电机类型包括直流电机、步进电机和伺服电机。每种电机都有其特定的应用场景和控制要求。 1.1 电机类型 直流电机 :适用于需要连续速度控制的应用。 步进电机 :适用于需要精确位置控制的应用。 伺服电机 :适用于需要高精度速度和位
2025-01-22 09:37:161462 在自动化控制系统中,电机控制器和伺服系统是实现精确运动控制的关键组件。电机控制器负责接收控制信号并驱动电机,而伺服系统则确保电机按照预定的轨迹和速度精确运动。 电机控制器的基本概念 电机控制器是一种
2025-01-22 09:35:461593 在现代工业自动化和电力驱动系统中,电机控制器和变频器是两个不可或缺的组件。它们都与电机的控制和性能优化有关,但它们在功能、应用和工作原理上存在明显的差异。 1. 定义和功能 电机控制器 是一种用于
2025-01-22 09:26:332434 在现代工业自动化和控制系统中,伺服电机编码器扮演着至关重要的角色。它能够精确测量电机的位置、速度和方向,为系统提供准确的反馈信息,实现高精度的运动控制。伺服电机编码器作为伺服系统中的关键部件,其性能和可靠性直接影响着整个系统的运行效果。
2025-01-20 14:01:181821 
0、前言 在一个闭环控制系统中,可分为输入参考值、闭环控制器、执行机构、输出参数,反馈系数,这几个部分。 设计一款控制器,可以让系统的输出参数跟踪输入参考值,达到了控制的目的。在直流控制系统中,常用
2025-01-20 10:46:572117 
电子发烧友网站提供《AN-643:数字可变光衰减器中ADuC832 MicroConverter IC和对数转换器AD8305的闭环控制电路实现.pdf》资料免费下载
2025-01-14 16:44:57 0
0 高压伺服控制器是一种高精度电子装置,用来控制高压伺服电机的位置、速度和力矩,可确保工业机器人、数控机床、喷绘写真、激光切割以及自动化生产线等设备实现高精度运动定位控制。其通过提供高效性能、快速响应
2025-01-14 11:42:47746 
高压伺服控制器是一种高精度电子装置,用来控制高压伺服电机的位置、速度和力矩,可确保工业机器人、数控机床、喷绘写真、激光切割以及自动化生产线等设备实现高精度运动定位控制。其通过提供高效性能、快速响应、优化能量转换效率,保障伺服系统稳定可靠运行,有助于推动智能制造和工业4.0的转型与升级。
2025-01-13 18:06:351781 
伺服电机静电防护完整方案 伺服电机是一种能够将电能转换为机械能的装置,通过接收控制信号来实现对电机转速、转向和位置的控制。它具有高精度、高速度和高效率的特点,能够将电压信号转化为转矩和转速,以驱动
2025-01-09 14:28:371192 
在自动化和机器人技术领域,精确控制机械运动是至关重要的。舵机和伺服电机是两种常用的执行器,它们都能够实现精确的位置控制。尽管它们在某些应用中可以互换使用,但它们之间存在一些基本的区别,这些区别影响了
2025-01-08 17:39:212432
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论