 Ethernet/IP 转 CAN 实战:AB PLC 通过编码器实现伺服电机位置闭环控制
Ethernet/IP 转 CAN 实战:AB PLC 通过编码器实现伺服电机位置闭环控制

AB PLC与编码器通过EthernetIP转CAN通讯的完整应用案例
一、项目背景与需求
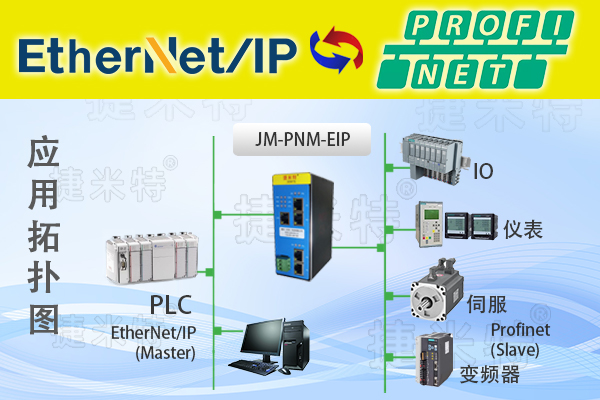
某自动化生产线需实现伺服轴的高精度位置检测,采用 AB CompactLogix 5000 系列 PLC 作为主控设备,搭配 20 位绝对值编码器(支持 CANopen 协议)。由于 PLC 原生支持 EthernetIP 协议,需通过Ethernet/IP转CAN(JM-EIP-CAN)网关实现协议转换,确保编码器数据实时接入 PLC 控制系统。
二、系统架构与技术参数
1.硬件配置
oPLC:AB CompactLogix L35E CPU,集成 EthernetIP 接口,支持 100Mbps 通讯速率。
o编码器:海德汉 ERN 1387,20 位绝对值编码器,CANopen 协议,通讯速率 1Mbps。
o网关:ProSoft MVI56E-MCM,Ethernet/IP转CAN网关,支持 CANopen 主 / 从模式,支持热插拔。
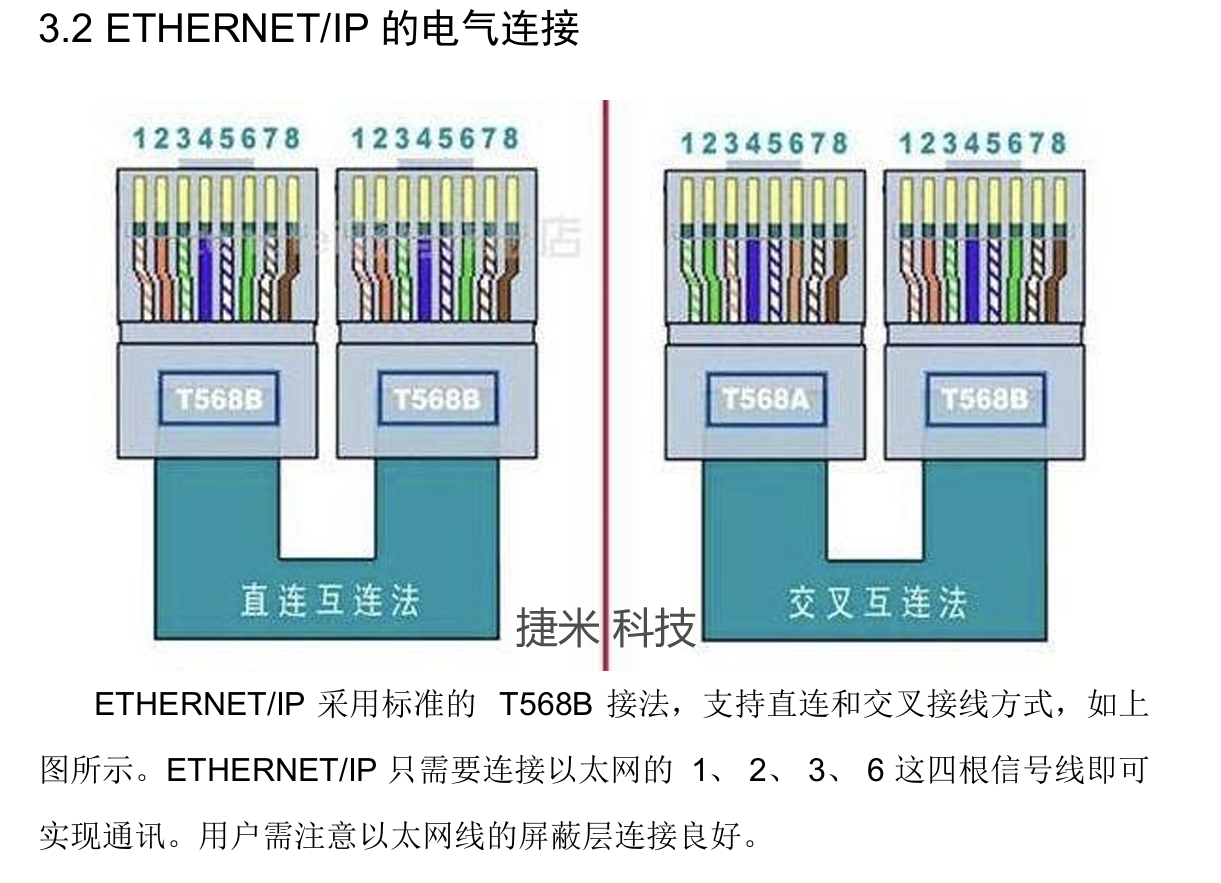
o线缆:CAN 总线采用屏蔽双绞线,终端电阻 120Ω;EthernetIP 使用工业级网线。
2.技术参数
| 组件 | 关键参数 |
| AB PLC | 数据处理周期≤10ms,支持 EthernetIP 实时 I/O 映射 |
| 编码器 | 分辨率 1/2^20(约 100 万脉冲 / 圈),位置更新频率≤1ms |
| 捷米特EthernetIP 转 CAN网关 | 协议转换延迟≤5ms,支持 CANopen DS301/DS401 协议,支持 16 个节点配置 |
三、配置步骤详解
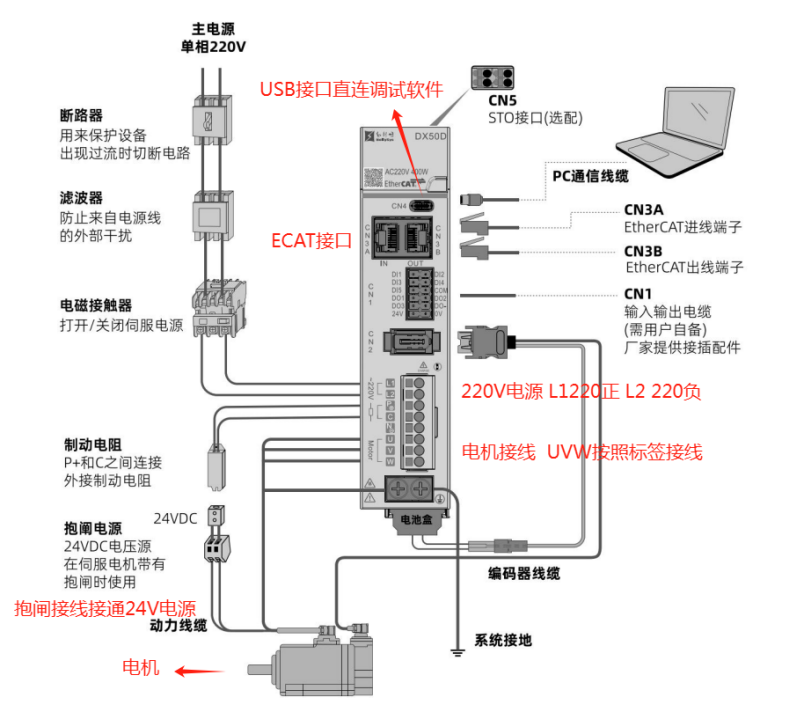
1. 硬件连接与网关初始化
·将Ethernet/IP转CAN网关插入 PLC 机架的扩展槽,通过网线连接 PLC 的 EthernetIP 端口;
·编码器 CAN_H/CAN_L 接入网关 CAN 接口,终端电阻接入总线末端;
·网关电源接入 24V DC,通过 ProSoft Configuration Manager 软件扫描设备,配置网关 IP 地址(如 192.168.1.10)。
2. PLC 端 EthernetIP 配置
·在 AB Studio 中创建项目,添加 CompactLogix CPU,启用 EthernetIP 接口;
·在 I/O Configuration 中添加Ethernet/IP转CAN网关设备,配置设备名称(如 “CAN_Gateway”)和通讯参数(超时时间 500ms,更新频率 10ms);
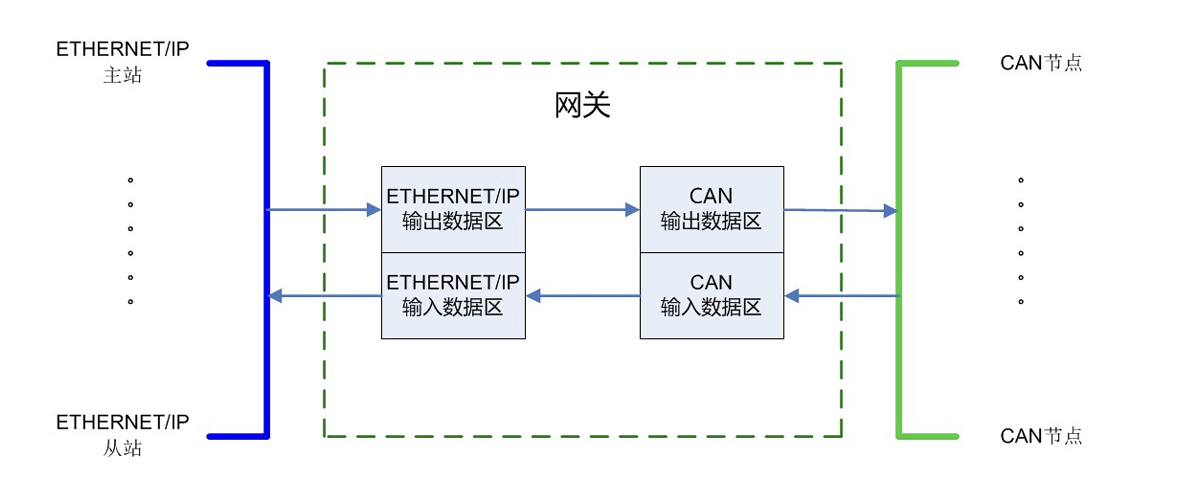
·建立输入 / 输出数据映射表,例如:
o编码器位置数据映射至 PLC 标签 “Encoder_Position [0..3]”(4 字节浮点型);
o编码器状态字映射至 “Encoder_Status”(1 字节)。
o
3. 网关端 CANopen 配置
·打开 ProSoft 网关配置工具,选择 “CANopen 从站模式”,设置编码器为从站节点(ID=10);
·配置 CANopen 通讯参数:波特率 1Mbps,数据帧格式 8 位数据 + 1 位停止位;
·定义 PDO(过程数据对象)映射:
oPDO1 映射编码器位置值(索引 0x6064,长度 32 位)至网关输出缓冲区;
oPDO2 映射编码器状态(索引 0x6041,长度 8 位)至网关输出缓冲区。
3.编码器参数设置
关于总线终端和拓扑结构: 470m 410m 640m 550m 480m 为了增强 CAN 通讯的可靠性,CAN 总线网络的两个端点通常要加入终端匹 配电阻,终端匹配电阻的大小由传输电缆的特性阻抗所决定。用户应在实际构成 网络中加以考虑。 网关已经在产品内置了 RT 为 120 欧姆电阻,用户若需要将 CAN 的总线 终端接入网络中,只需将 CANL 和 RL 短接,CANH 和 RH 短接。
·通过编码器配置软件(如海德汉 iTNC)设置 CANopen 节点 ID=10,波特率 1Mbps;
·启用循环同步模式(Cyclic Synchronous Position),更新周期 1ms;
·配置位置数据输出格式为绝对值(工程单位 mm),映射至 PDO1。

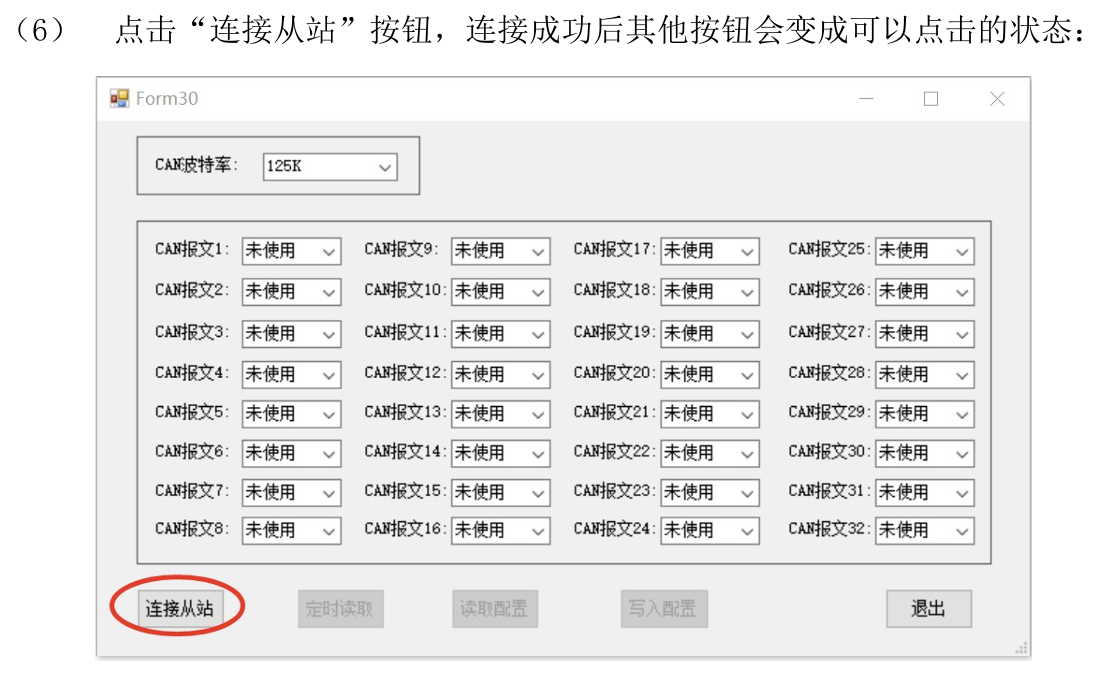
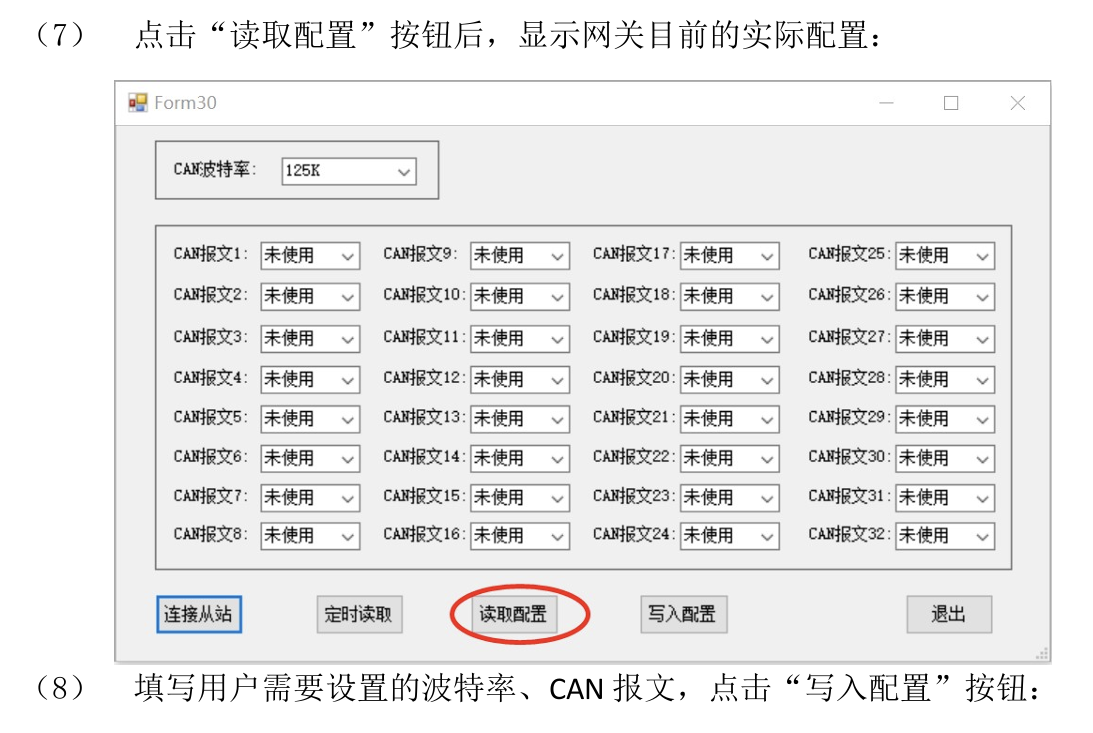
使用 GW Modbus Bulider软件配置 CAN 报文
(1) 使用网线将电脑与网关相应的网口连接。
(2) 将拨码的第 8 位拨到 ON,此时网关处于配置状态,然后给网关供电。
(3) 网关处于配置状态时,此时网口使用 192.168.1.201 的 IP 地址,应使电
脑的 IP 网段设置于 192.168.1.xxx 。
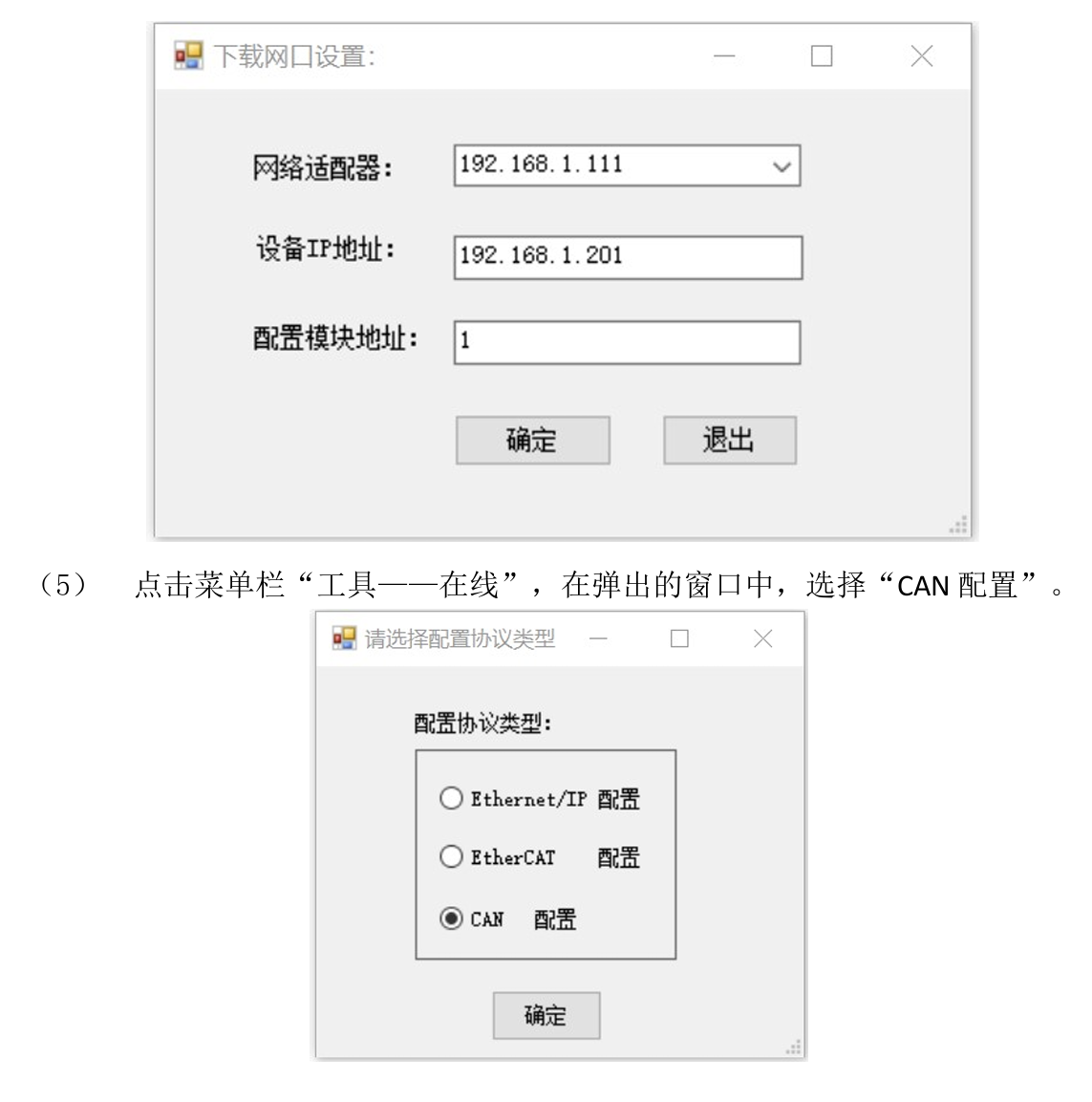
(4) 打开 GW Config 软件,首先设置软件使用的 IP 地址,点击菜单栏“设
置— —通讯设置——以太网设置”,如下图,电脑的 IP 是
192.168.1.111。(设备 IP 地址和配置模块地址不需要设置)
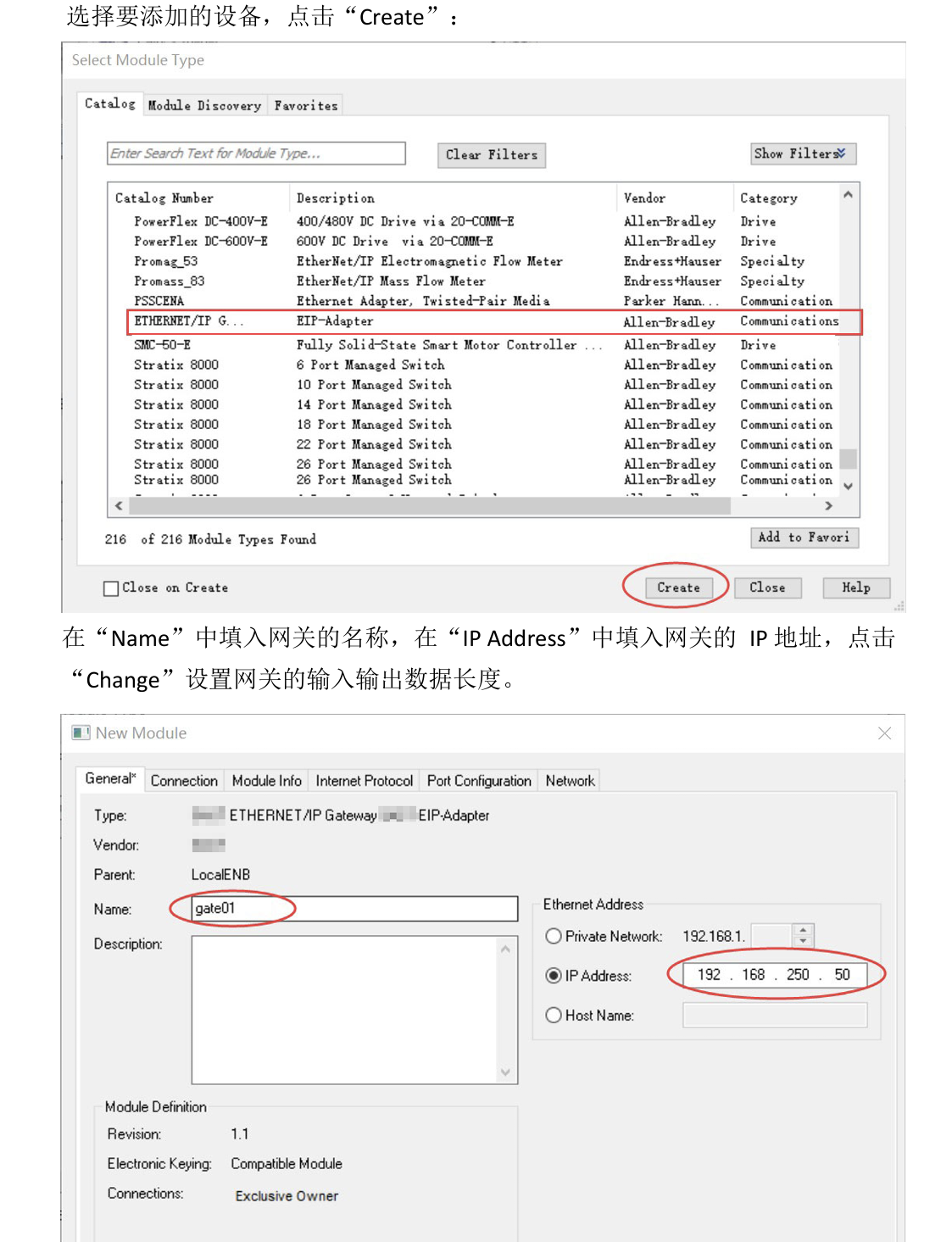
配置网关的 ETHERNET/IP 地址
(1) 使用网线将电脑与网关相应的网口连接。
(2) 将拨码的第 8 位拨到 ON,此时网关处于配置状态,然后给网关供电。
(3) 网关处于配置状态时,此时网口使用 192.168.1.201 的 IP 地址,应使电
脑的 IP 网段设置于 192.168.1.xxx 。
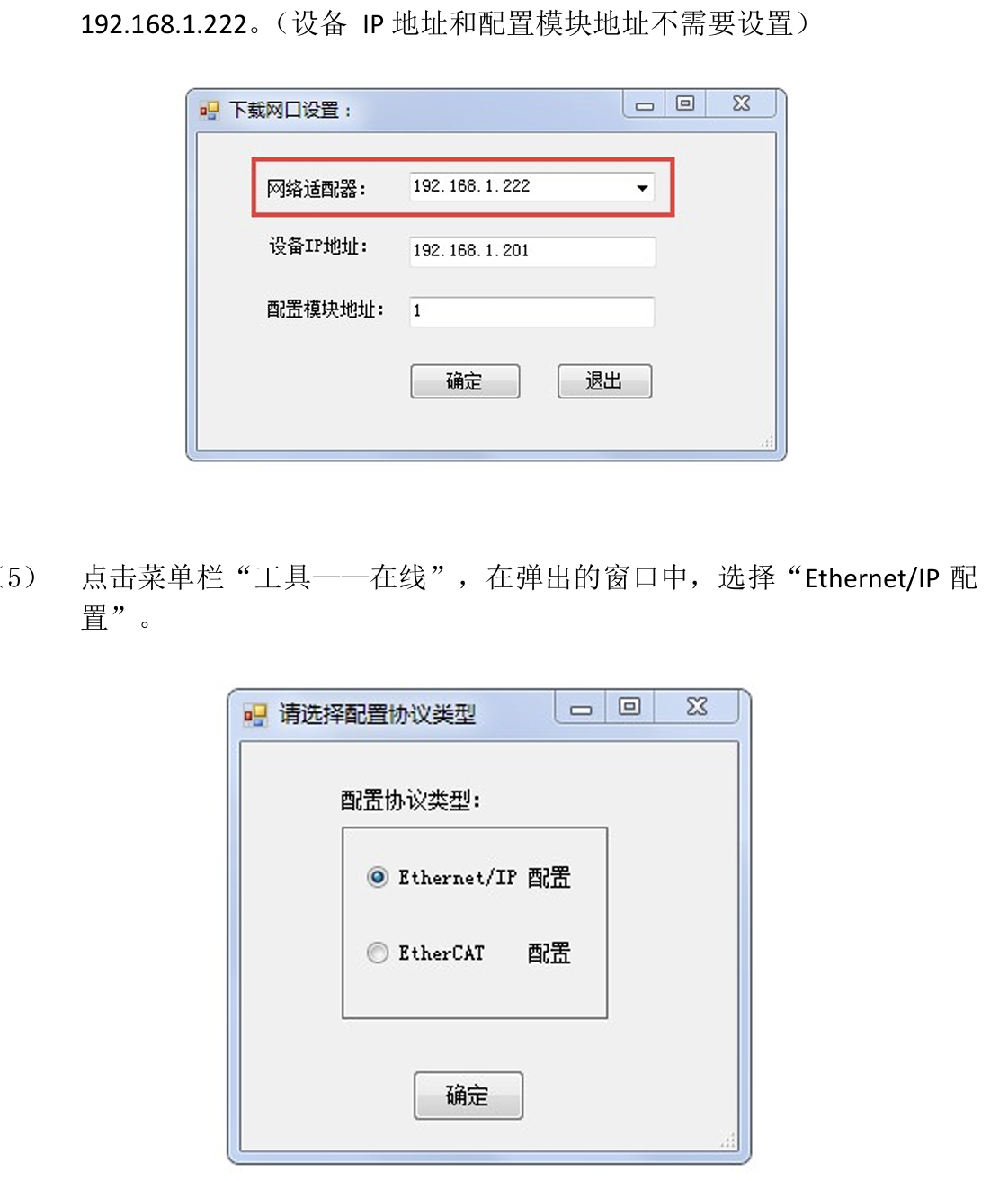
(4) 打开 GW Modbus Bulider 软件,首先设置软件使用的 IP 地址,点击菜单
栏“设置— —通讯设置——以太网设置”,如下图,电脑的 IP 是
192.168.1.222。(设备 IP 地址和配置模块地址不需要设置)
应用效果与拓展
该方案通过特米特Ethernet/IP转CAN网关模块(JM-EIP-CAN)实现了 AB PLC 与 CANopen 编码器的无缝通讯,解决了不同协议间的兼容性问题。系统运行稳定,数据传输延迟≤15ms,适用于数控机床、机器人分拣等高精度场景。若需扩展,可通过同一网关接入多台 CANopen 设备(如伺服驱动器),进一步简化工业网络架构。
总结:捷米Ethernet/IP转CAN网关模块技术在工业自动化协议转换中具有高兼容性与实时性,通过合理的硬件选型与参数配置,可高效实现 AB PLC 与编码器等设备的跨协议通讯,为复杂产线的集成提供可靠解决方案。
审核编辑 黄宇
-
编码器
+关注
关注
45文章
4029浏览量
143871 -
CAN
+关注
关注
60文章
3112浏览量
473984 -
网关
+关注
关注
9文章
7101浏览量
56760 -
Ethernet
+关注
关注
3文章
716浏览量
58364
发布评论请先 登录
会议云台马达驱动板:高精度速度 / 位置闭环控制技术
EtherNet/IP转Modbus RTU网关如何让罗克韦尔PLC“听懂”编码器的每一度角


疆鸿智能ETHERNET IP转MODBUS让罗克韦尔PLC和编码器轻松对话

老旧产线不淘汰,数据孤岛轻松破:EtherNet/IP与DeviceNet协议转换实战

Ethernet/IP转ProfiNet网关:汇川PLC与伺服电机通讯最佳配置方案
采用MT6835绝对式磁编码器实现高精度闭环步进电机控制
集成MT6816磁性角度编码器实现伺服电机紧凑型非接触位置传感
MT6835:高速磁编码技术赋能下一代伺服电机闭环控制
如何实现罗克韦尔PLC与和利时伺服电机通讯-EtherCAT转EtherNet/IP
阀门拉手传感器,Ethernetip转canopen网关解决AB-PLC的冷门用法





评论