USB-A的快充协议是通过D+D-通道来传输协议的,所以一般采用A-C数据线,内部是4芯线:VBUS、GND、D+、D-。 QC协议是通过在D+D-上给不同的电压获取快充协议。 三星AFC协议是通过在D+D-上发送数据,获取快充协议。 华为FCP、SCP协议是通过在D+D-上发送数据,获取快充协议。 USB-C的PD快充协议是通过CC1、CC2通道来传输协议,所以一般采用C-C数据线,内部是5芯线:VBUS、GND、CC、D+、D-。 PD协议相对于USB-A协议要复杂一点,而且对控制芯片的主频等硬件也有要求。PD协议
2025-12-24 16:50:55 975
975 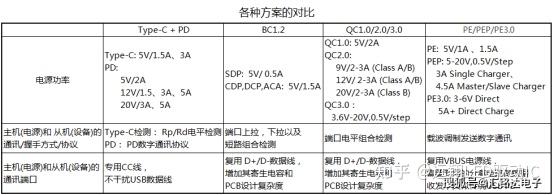
惯性测量单元(IMU)长久以来被视为航空航天和高端导航领域的核心技术。然而,随着微机电系统(MEMS)技术的成熟,高性能、低成本、小型化的IMU已彻底突破传统疆界,成为工业4.0时代不可或缺
2025-12-24 10:08:23190 在电子设备中,晶振是一种重要的元器件,它的主要作用是产生稳定的频率。在晶振的种类中,恒温晶振和普通晶振是两种常见的类型,它们在使用上有着明显的区别。本文将详细介绍恒温晶振与普通晶振的区别。首先,我们
2025-12-23 13:55:483443 
近期,导远科技与中国电动叉车领域的龙头企业展开合作,为其多款自动驾驶叉车提供高精度惯性测量单元(IMU)模组,进一步强化车辆的空间定位能力。此次合作中,IMU被安装在激光雷达正下方,通过不依赖外部环境的高频、连续的自主惯性数据输出,为设备的定位系统提供更稳定的运动参考。
2025-12-17 10:38:27526 本期我们聚焦论坛网友短笛君的实测体验。他首先分享了MEMS上位机体验并进行MLC数据预采集,随后实现了LSM6DSV320X IMU传感器在Linux平台的驱动移植,并开发具备四元数和欧拉角解算的完整姿态感知应用,最后讲解了如何在MEMS Studio上进行MLC的过程。
2025-12-11 14:31:236728 
区别
1、面向对象编程 (OOP):
C语言是一种面向过程的语言,它强调的是通过函数将任务分解为一系列步骤进行执行。
C++在C语言的基础上扩展了面向对象的特性,支持类(class)、封装、继承
2025-12-11 06:23:20
贴片电容在现代电子电路中广泛应用,低容值与高容值贴片电容因不同的设计、材料和工艺,在诸多方面存在显著差异。这些差异涵盖了电容值范围、应用场景、电气性能(如等效串联电阻、等效串联电感、耐压值)、尺寸与成本等维度。了解它们的区别,对于电子工程师精准选型,确保电路性能至关重要。本文将深入剖析两者区别,
2025-12-10 15:31:15316 
一站式PCBA加工厂家今天为大家讲讲PCB设计和PCB打样有什么区别?PCB设计和打样之间的区别。PCB设计(Printed Circuit Board Design)和打样(Prototyping
2025-11-26 09:17:24389 
#IMU选型 #工程监测 做老旧隧道监测的来求助!之前用刚性IMU,隧道里有震动就容易飘数据,换了两台都没解决,老板快把我骂哭了?
听朋友说全柔性IMU靠谱,说能像创可贴一样贴在隧道壁上,抗震动抗
2025-11-25 17:02:54
在惯性传感器领域,MEMS技术驱动的电容式加速度计与陀螺仪已深耕十余年。2024年,这类产品出货量超37亿件,凭借微型化与高性价比封装,成为移动、可穿戴设备的核心组件。过去十年间,先进IMU功耗降至原来的十分之一,稳定性与噪声性能也大幅提升。
2025-11-17 09:33:47552 XsensMTiAHRS和GNSS/INS产品用于各种汽车应用,例如自动驾驶汽车、卡车、穿梭巴士和火车。XsensMTiGNSS/INS旨在使用融合的IMU和GNSS数据来改进运动中车辆的方向和位置
2025-11-07 12:04:40472 
IMU P/N 616-4042通过PWM输出和工业级接插件设计,为卡特彼勒装载机、挖掘机提供精准的姿态监测。其可部署于动臂、斗杆等关键部位,实时反馈设备运动状态,有效提升作业精度与安全性。该产品具备良好的环境适应性和抗干扰能力,在复杂工况下保持稳定输出,为设备智能化控制提供可靠数据支撑。
2025-11-07 09:25:27233 
近日,导远科技自研的6轴车规级MEMS IMU GST80已通过AEC-Q100可靠性测试。
2025-11-06 16:04:32882 
IMU P/N 596-7347通过实时监测工程机械的姿态与运动数据,为设备精准控制和安全运行提供关键支持。其在挖掘机、装载机等复杂工况下展现的测量稳定性与环境适应性,有效提升了作业效率与设备可靠性,符合现代施工对智能化的需求。
2025-11-05 09:50:44238 
直川科技IMU P/N 563-0598通过三轴加速度、滚动角等六参数同步测量,结合工业级防护与数据冗余设计,为卡特彼勒系列工程机械提供高精度运动状态监测,有效提升作业安全性与设备可靠性,助力智能运维升级。
2025-11-03 10:06:33262 
在无人机精准悬停、自动驾驶汽车平稳过弯的背后,有一颗至关重要的核心处理器 - 惯性测量单元(IMU)。它的精度,直接决定了智能设备感知自身姿态的准确度。一颗高精度的IMU,其卓越性能离不开生产环节
2025-10-30 10:56:21277 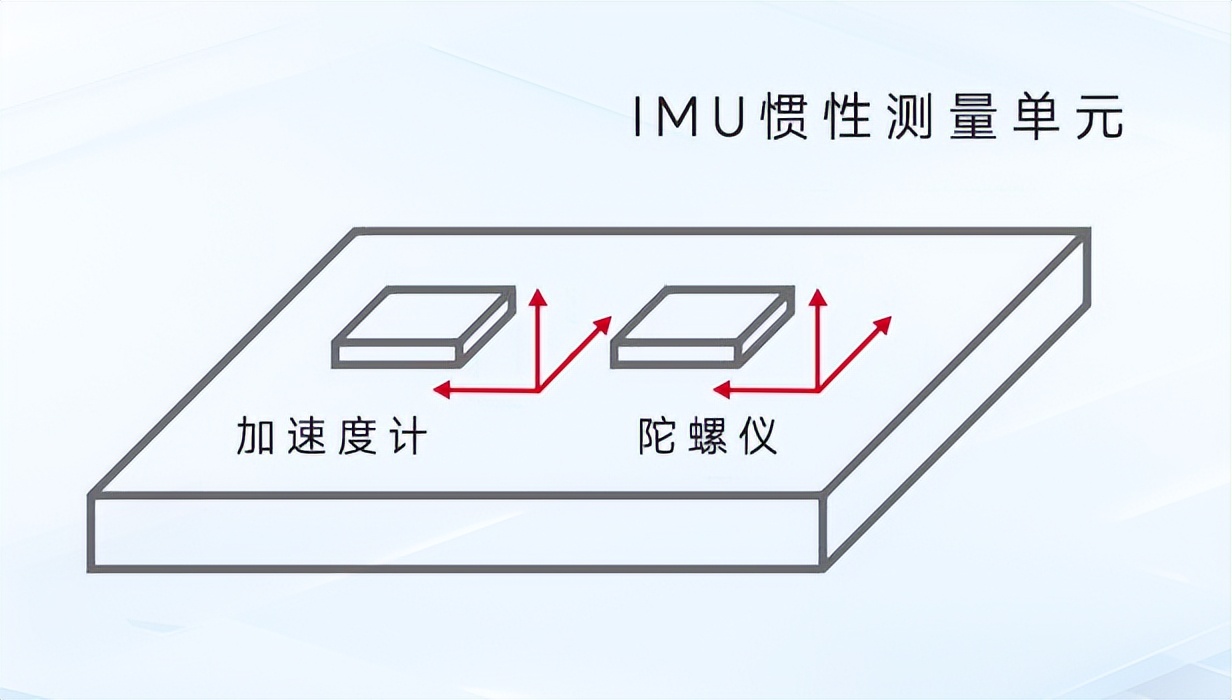
IMU P/N 470-4959通过6轴惯性测量数据,为卡特彼勒挖掘机和平地机提供高精度坡度控制。该传感器具备抗振动、宽温域工作特性,可实时监测设备姿态,自动调整铲斗轨迹与刮刀横坡,有效提升边坡修整与精平作业的精度与效率,保障复杂工况下的施工质量。
2025-10-28 10:44:26191 
STMicroelectronics LSM6DSV32X 6轴惯性测量单元 (IMU) 是一款高性能、低功耗的6轴小型IMU,配备3轴32g数字加速度计和3轴数字陀螺仪。这些集成元器件提供了采用
2025-10-23 15:00:35626 
在电子电路中,常常会用到滤波电路,尤其是电源芯片,有的是电容滤波,有的是电感滤波,电容和电感滤波的作用看起来差不多,那么它们之间有什么区别呢?在实际应用中又如何选择呢?
2025-10-23 14:10:275288 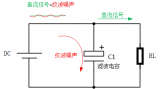
随着视觉惯性传感器在自动驾驶、机器人、AR/VR 等领域规模化落地,多相机+IMU 联合标定需求呈爆发式增长,多相机+IMU 联合标定领域尚属空白。
感算商城联合知名方案公司推出国内首台量产级
2025-10-23 14:04:48
功率因数PF与cosφ的本质区别在于cosφ仅反映基波中的功率因数,而PF反映的功率因数是同时包含了基波和谐波。 一、PF与cosφ的本质区别 功率因数 (PF):有功功率(P)与视在功率(S
2025-10-15 10:32:07567 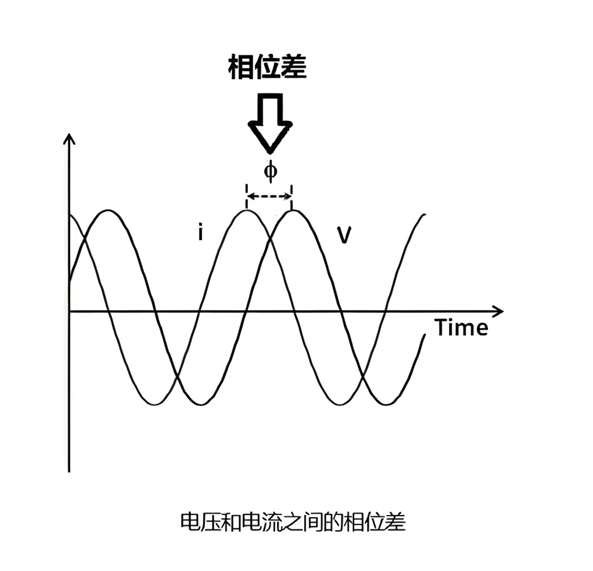
STMicroelectronics ISM6HG256X智能惯性测量单元 (IMU) 是一款高性能、低噪声、低功耗的6轴IMU。该设备配备了三轴数字低重力加速度计 (16g)、三轴数字高重力加速计
2025-10-15 09:11:30683 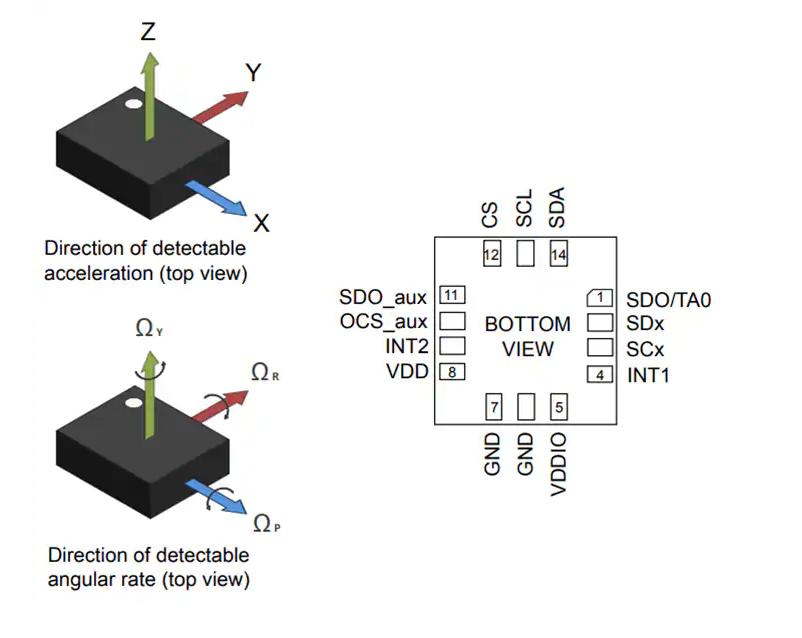
IMU P/N 333-8538通过集成三轴陀螺仪与加速度计,为卡特彼勒重型设备提供六自由度运动感知。它精准监测车身倾斜、回转角速度等关键参数,支持斜坡作业防倾覆、卸料稳定性优化等功能。其IP67防护与宽温设计适配严苛工况,基于CAN J1939协议便于系统集成,是实现预测性维护的核心组件。
2025-10-14 11:23:15361 
直川科技通过持续优化IMU传感器的环境适应性与数据可靠性,为卡特彼勒挖掘机提供了兼顾精度与稳健性的姿态感知方案。其P/N312-0755产品在多个大型项目中的实践表明,基于工业标准设计的IMU已成为重型机械智能升级的关键组件。
2025-10-11 11:04:52423 
本文深入介绍GMSL技术,重点说明用于视频数据传输的像素模式和隧道模式之间的差异。文章将阐明这两种模式之间的主要区别,并探讨成功实施需要注意的具体事项。
2025-10-10 13:49:022003 
近日,导远科技获得工信部电子五所颁发的自主可控评测报告,确认该公司研发的6轴车规级MEMS IMU GST80惯性传感器芯片符合自主可控要求。
2025-10-09 11:33:34757 电子发烧友网综合报道 目前,人形机器人对 IMU(惯性测量单元)芯片的需求主要集中在高实时性、高精度、小尺寸、低功耗等方向,尤其适用于姿态控制、平衡维持、导航定位与动作执行等关键场景。 具体而言
2025-09-23 09:08:273188 一图看懂BP2525x之间的区别
2025-09-13 15:22:162551 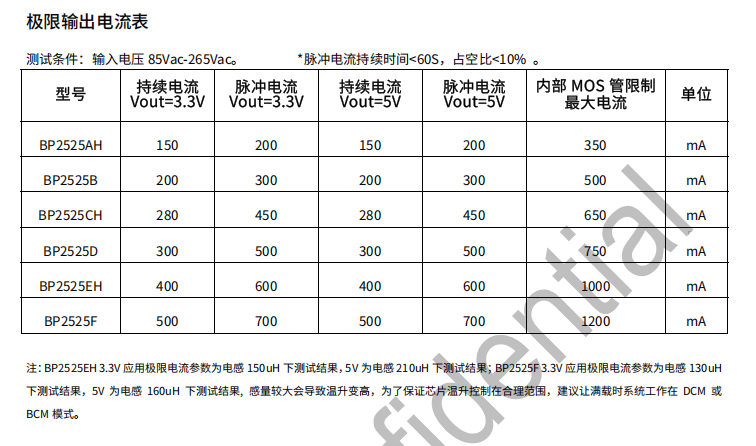
工控机和电脑在我们的生活和工作中都扮演着重要角色,但它们之间存在着诸多区别。下面我们就来详细探讨一下。
2025-09-13 11:15:455822 
TDK株式会社(东京证券交易所代码:6762)重磅推出全新的SmartMotion® ICM-536xx系列高性能六轴IMU,并向特定客户开放供货。
2025-09-05 09:15:35895 、6极、8极等,不同的极数对电机的性能和应用有着重要影响。下面我给大家详细介绍电机极数的意义和不同极数之间的区别。一、电机极数的意义电机的极数决定了电机的结构和工
2025-08-22 18:07:138783 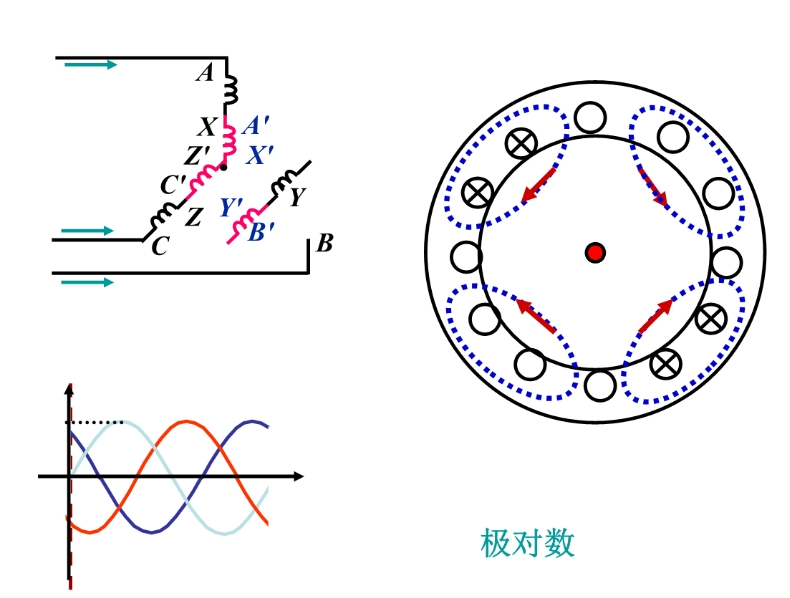
常规单模光纤和耐弯曲光纤在结构设计、传输性能、应用场景、成本与安装难度等方面存在显著区别,以下是详细对比: 1. 结构设计 常规单模光纤(如G.652D): 纤芯直径:通常为8-10微米,包层直径为
2025-08-21 10:13:11572 无人机在天空中自由穿梭、稳稳悬停,背后究竟是什么在发挥关键作用呢?这就不得不提到一个重要部件 ——IMU。
2025-08-12 14:27:241264 在机器视觉领域,工业相机和智能相机是两种常见的设备,它们各自具有独特的特点和应用场景。了解这两者之间的差异有助于我们在实际应用中做出更合适的选择。本文将从多个角度详细解析工业相机与智能相机的区别
2025-08-11 14:44:451598 
)在确保出行安全方面发挥着至关重要的作用。那么,功能安全和SOTIF之间有什么区别?它们在哪些特性上又存在联系?
2025-08-06 13:53:231526 
体积,选择小型化则不得不牺牲测量稳定性。 ER-MIMU-103 MEMS IMU正是为破解这一矛盾而生。它将 3 轴陀螺仪、3 轴加速度计、3 轴磁力计和气压计集成于47mm×44mm×14mm 的模块中,其厚度仅有14mm!在 “小体积” 与 “高精度” 之间找到了完美平衡。多种
2025-07-29 15:14:50446 IMU的精度对无人机姿态控制至关重要,是决定无人机飞行稳定安全、响应性和任务执行能力的关键因素之一, IMU(包含三轴加速度计和三轴陀螺仪)是飞控系统实时估算无人机姿态(俯仰、横滚、偏航角)的核心
2025-07-25 17:01:10629 在无人机从消费级向工业级/行业级跨越的过程中,"精准" 与 "稳定" 成为核心竞争力,这依赖于底层惯性测量技术的突破。IMU是无人机稳定控制的核心,它直接
2025-07-23 15:21:28900 在无人机与机器人领域,精准的姿态感知和运动控制是实现复杂任务的核心前提,惯性测量单元(IMU)为系统提供独立、实时、高频率的角速度与加速度数据实现运动感知能力,从根本上改变了精准运动控制的实现方式,并在多个维度上对其进行了重新定义。
2025-07-22 15:15:15478 无人机悬停时姿态漂移?机器人操控失误?自动化设备精准定位总差 "临门一脚"?它们都需要一颗强大的“运动感知心脏”--IMU。
2025-07-22 13:13:10669 在无人机自主飞行的核心技术链条中,惯性测量单元(IMU)的精度与可靠性直接决定了整机的控制上限。高精度IMU对无人机系统的提升是全方位的,尤其在导航精度、稳定性、自主性和可靠性等关键性能方面。它通常是实现专业级和工业级无人机应用的核心传感器之一。
2025-07-21 15:39:28631 无人机在进行任何形式的飞行时,必须了解空中平台的方向、其运动的性质以及飞行方向。
通常用于测量此运动的是IMU,IMU提供无人机在横滚、俯仰和偏航方面的加速度和角速度数据。常见应用包括控制和稳定、测量和测试。
2025-07-15 15:05:05733 在工程机械和农用机械领域,稳定性和安全性一直备受关注。在该领域中,惯性测量单元IMU F99系列传感器正逐渐崭露头角,成为工程机械和农用机械中的得力助手。哪怕是在外部加速度失真的情况下,IMU F99依然能保持高度准确性,实时监测机械设备的倾角和加速度。
2025-07-11 16:34:51717 Modbus和MQTT是工业领域中两种不同的通信协议,在设计目标、应用场景、通信模式等方面存在显著差异,以下从多个维度简析两者的区别: 1.设计目标与起源 Modbus 诞生于1979年,由施耐德
2025-07-10 14:10:25799 无人机稳定飞行、机器人精准控制及工业自动化都需要高精度、高可靠的运动感知,感知数据质量不足或延迟,无法有效支撑高精度、高响应的闭环控制。这类设备都会使用IMU进行运动感知,但高性能惯性测量的需求与项目严格的成本预算之间却出现了难以调和的矛盾。
2025-07-09 16:13:10476 寻北IMU是一种无需依赖GPS或磁力计等外部参考,通过利用内置陀螺仪检测地球自转角分量,经过解算即可确定真北方向的IMU。与磁力计测量出的磁北不同,真北是固定不会改变的,是地球自转轴指向的方向。磁北
2025-07-08 15:52:34552 电源中的电气隔离不仅仅是关乎安全——它更是性能和可靠性的基石。本文将探讨隔离屏障的概念以及工作电压和测试电压之间的区别。它还将讨论标准为何重要?帮助工程师设计出满足当今严苛法规和应用需求的稳健系统。
2025-07-08 15:29:52778 姿态控制精度与系统集成度现已成为制约无人机性能提升的关键瓶颈。无人机通过IMU集成的陀螺仪与加速度计,实现对三维空间姿态(角速度、加速度)数据的实时测量,数据传递至飞控系统,能得到无人机的姿态、速度、位移等信息,无人机稳定飞行的核心依赖于IMU的精度与可靠性。
2025-07-07 16:16:35478 在水平定向钻孔这类复杂地下工程领域,精确的姿态和方位测量直接决定着钻井效率与轨迹精度。ER-MIMU-091 MEMS IMU 专为严苛的石油钻井、开采及水平定向钻孔(HDD)环境设计,相比光纤陀螺
2025-07-04 11:35:21830 
惯性测量单元(IMU)作为无人机飞行时运动感知的核心部件,它通过整合陀螺仪、加速度计,有时还包括磁力计、气压计等多种传感器的数据,全面掌握无人机的运动状态。这些信息对于飞行控制、姿态稳定和导航至关重要。
因此,选择一个适合无人机的IMU是非常重要的,其性能直接影响无人机的飞行控制与姿态稳定。
2025-07-04 11:33:231096 
ER-AHRS-7分别为高可靠性高性价比的10轴小型航姿参考系统/惯性测量单元,惯性传感系统集成了工业级MEMS三轴陀螺仪、三轴加速度计和三轴磁力计和气压计,优秀的滤波和数据融合算法。此外,经过
2025-07-03 10:50:29
最近大家讨论比较多的话题是如何区别断路器壳架电流、额定电流和整定电流,以及三者之间有何联系。
2025-06-30 09:58:183821 
在无人机、机器人、无人车辆等智能设备快速发展的今天,高精度姿态测量和稳定控制成为核心需求。然而,传统惯性测量单元(IMU)往往面临体积大、重量重、环境适应性差等痛点。ERICCO
2025-06-27 16:10:56480 语音跳线和网络跳线在传输信号类型、接口类型、线缆结构、应用场景等方面存在明显区别,以下是详细介绍: 传输信号类型 语音跳线:主要用于传输模拟语音信号,也就是我们日常打电话时所使用的声音信号。这种信号
2025-06-27 10:09:46736 在现代工业与科研中,产品可靠性测试至关重要。快速温变试验箱和冷热冲击试验是两种核心环境试验设备,均模拟极端温度对产品的影响,这两者之间究竟有何区别呢?让我们一同深入探究
2025-06-17 14:39:24503 
传感器IMU是LSM6DSL型号,磁强计是LIS3MDL型号,使用motionfx库进行姿态解算,遇到航向角不准确的问题。我查看地磁计的值是正常的,但是航向角不正常:例如传感器指向正北,地磁计X轴
2025-06-10 07:19:58
CY7C65214 和其他 USB 串行桥接控制器之间有什么区别:CY7C65211、CY7C65213 和 CY7C65215?
社区有很多关于USB串行桥接控制器的信息;但CY7C65214什么都没有。
2025-05-29 06:49:45
Analog Devices ADIS1657x 精密 微机电系统 (MEMS) 惯性测量单元 (IMU) 模块包括三轴陀螺仪和三轴加速计。这些模块中的惯性传感器集成了信号调理功能,可优化动态性能
2025-05-27 15:05:03786 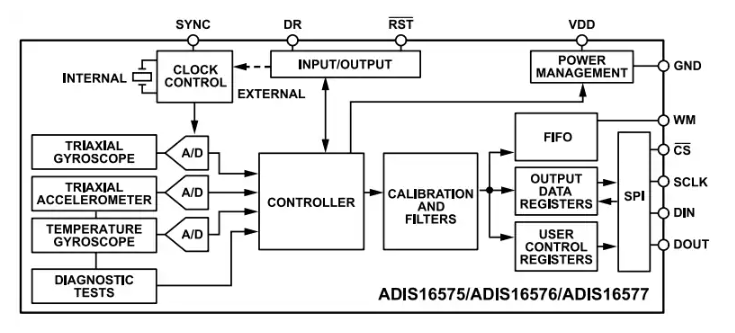
随着技术提升,无人机领域正经历着前所未有的变革,而IMU无疑是这场变革中的关键力量。作为专业人士,您一定深知前沿技术对行业的重塑意义,今天就带您深入探寻 IMU 在无人机产业的无限潜力。 以一款[九
2025-05-26 13:55:26773 VGA和DP是两种常见的显示接口,它们在设计、性能和应用方面有显著区别。
2025-05-14 16:36:472627 CDS(中央化学液供应系统)与SDS(自动供液系统)在半导体、医疗等领域均有应用,但两者在功能定位、技术特点及应用场景上存在显著差异。以下是两者的核心区别: 1. 功能定位与系统架构 CDS(中央
2025-05-12 09:10:052144 AnalogDevices ADIS1647x精密微型工业IMU提供了一种将完整惯性系统集成到工业及运动物联网 (IoMT)应用中的简单方法。ADIS1647x微型工业IMU采用小尺寸的标准表面贴装
2025-04-24 19:30:181148 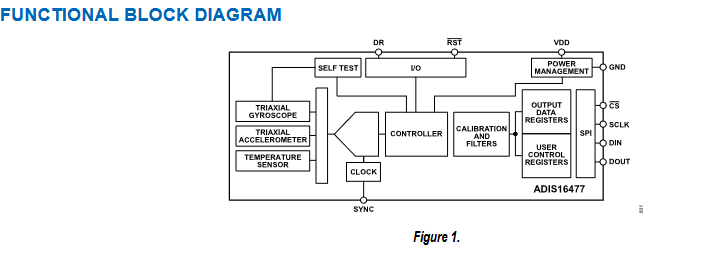
传感器IMU是LSM6DSL型号,磁强计是LIS3MDL型号,使用motionfx库进行姿态解算,遇到航向角不准确的问题。我查看地磁计的值是正常的,但是航向角不正常:例如传感器指向正北,地磁计X轴
2025-04-23 08:11:24
带你轻松了解它们之间的区别与含义。
2025-04-22 14:22:474373 
简介 ER-AHRS-7分别为高可靠性高性价比的10轴小型航姿参考系统/惯性测量单元,惯性传感系统集成了工业级MEMS三轴陀螺仪、三轴加速度计和三轴磁力计和气
2025-04-09 10:29:20
电子发烧友网站提供《GD32与STM32有什么区别.docx》资料免费下载
2025-04-03 17:27:20 0
0 的卫星信号追踪,离不开高精度的姿态测量与控制。爱普生M-G366PDG惯性测量单元(IMU)凭借其卓越的性能,成为动中通天线系统的理想选择。爱普生M-G366PD
2025-04-01 17:01:10757 
(ADI)全新ADIS1657x 精密微机电系统 (MEMS) 惯性测量单元 (IMU) 模块。ADIS1657x MEMS IMU具有坚固耐用的三轴陀螺仪和加速度计,适用于导航、稳定、仪表、工厂和自主
2025-03-31 15:25:19660 我想知道 HSE 子系统 HSE_H、HSE_M 和 HSE_B 之间有什么区别?
区别是它们在哪个板上运行,还是也存在功能差异?
2025-03-20 07:37:57
当我阅读 S32G3 参考手册时,我对 S32G DMA 和 Noc 之间的区别有疑问。由于 NoC 支持内核、外设和 SRAM 之间的通信,并且 DMA 还可以在内存块和 I/O 块之间传输数据(没有内核?我不确定)。
2025-03-17 08:25:30
本文将探讨IMU与压电薄膜传感器在机器人领域中的典型应用及未来发展方向,以及Murata(村田制作所)所推出的相关解决方案。
2025-03-12 10:22:541170 串联谐振与并联谐振在电路理论中是两种重要的谐振现象,它们之间存在显著的区别。以下是串联谐振与并联谐振的主要差异: 一、基本原理 串联谐振 :发生在由电感(L)、电容(C)和电阻(R)串联
2025-03-06 15:23:024635 在当今快速发展的无人机技术领域,测绘巡检机载挂载已成为实现高效、精确地理信息采集的关键工具。随着城市化进程的加快和基础设施的日益复杂,对于高精度、高稳定性的测绘需求日益增长,这使得IMU(惯性测量
2025-03-05 17:38:55796 
微型导轨与常规直线导轨的主要区别在于尺寸、承载能力、精度和应用场景等方面。
一、区别:
1、尺寸:微型导轨相较于常规直线导轨尺寸相对较小,最小的直线导轨滑座宽度尺寸可以达到8MM,长度尺寸可以
2025-03-05 16:25:50
ER-MG2-300/400 是一款导航级MEMS陀螺传感器,测量范围高达400度/秒,零偏不稳定性为0.03°/h,专为高性能IMU/AHRS/GNSS辅助INS、航空/海洋/陆地测绘系统、无人机
2025-02-28 09:57:49
pogopin的图纸中有标注工作行程和最大行程,但是很多客户不理解这两者之间的区别,他们之间主要区别在于它们的定义和应用场景。CFE致力成为行业领先的全球化连接系统解决方案商,为客户提供更全面高效可靠的技术与服务。
2025-02-27 17:23:24928 
请问一下,
问题一:在dlpc3479中的
显示模式(display mode)和光控制模式(Light Control mode)之间有什么区别?
这一部分是否有专门的介绍资料?
问题二:由于
2025-02-24 08:27:36
焊盘(Pad)和过孔(Via)在电子制造和PCB(印刷电路板)设计中扮演着不同的角色,它们之间的主要区别体现在定义、原理、作用以及设计细节上。以下是对这两者的详细比较:
2025-02-21 09:04:421762 私有云和公有云在多个方面存在显著的区别,以下是具体的比较,主机推荐小编为您整理发布私有云和公有云有什么区别。
2025-02-20 10:38:521645 随着无人机在农业测绘、物流运输、应急救援等领域的广泛应用,市场对高精度、高可靠性导航系统的需求激增。每一次精准的姿态调整与运动响应,都离不开IMU。ER-MIMU-08 应运而生——成为无人机导航与控制系统低成本高精度的核心解决方案。
2025-02-19 09:15:20938 导轨与滑块之间的松紧程度对于设备的精度和稳定性有着重要的影响。
2025-02-18 17:52:161373 
MPLS(Multi-Protocol Label Switching,多协议标签交换)与VPN(Virtual Private Network,虚拟专用网络)在多个方面存在显著的区别。以下
2025-02-14 17:04:192168 两款芯片的区别;TXB0104是buffered-type;TXS0102是switch-type请问这两者之间有什么区别吗?
2025-02-10 08:42:36
舵机和伺服电机在自动化和机器人技术领域中都是常用的执行器,它们都能够实现精确的位置控制,但二者之间存在一些基本的区别,具体如下: 一、定义与构成 1. 舵机
2025-02-07 07:37:411933 
云计算和人工智能虽然各自具有独特的特点和应用领域,但它们之间存在着紧密的联系和互动。接下来,AI部落小编带您了解云计算和人工智能的区别与联系。
2025-02-06 10:08:211532 温度测量是工业和科学研究中不可或缺的一环,热电偶和热电阻作为两种常见的温度测量传感器,各自具有独特的工作原理、材料构成、应用领域以及优缺点。本文将详细探讨热电偶与热电阻的技术特点和应用,并对它们之间的区别进行深入分析。
2025-02-03 14:31:001911 在计算机系统中,I/O接口与I/O端口是实现CPU与外部设备数据交换的关键组件,它们在功能、结构、作用及运作机制上均存在显著差异,却又相互协同工作,共同构建起CPU与外部设备之间的桥梁。本文旨在深入探讨I/O接口与I/O端口的定义、特性、功能及其区别,为读者提供全面、深入的技术解析。
2025-02-02 16:00:003195
我刚刚接触ADC,想选一款芯片,看到接口有SPI 和Serial SPI,哪位专业人士解答下两者有什么区别呢?
2025-01-24 07:55:25
们使用的开关电源又有哪些区别呢?今天就来为大家分析下关于电源适配器和开关电源之间的区别。
开关电源:
开关电源是将220V电压变成低压直流的一种方法,他区别于传统的工频变压器。采用这种开关变换电压技术的电源
2025-01-16 10:57:25
请教:ads1258 IRTCR和IRTCT的区别在哪?手册里没看明白,TCR和TCRG4的区别应该是有铅和无铅。多谢
2025-01-10 10:23:08
您好,板子之前采用的是ADC12D1600,现在想换ADC12D1600RF;
请问:
1.这两种型号之间有什么区别?(一个高速采样,一个射频采样)
2.ADC12D1600RF是pin compatible的,能否在不改变已有的PCB上直接进行替换?
2025-01-10 06:10:34
在自动化和机器人技术领域,精确控制机械运动是至关重要的。舵机和伺服电机是两种常用的执行器,它们都能够实现精确的位置控制。尽管它们在某些应用中可以互换使用,但它们之间存在一些基本的区别,这些区别影响了
2025-01-08 17:39:212430 地埋光缆与架空光缆在多个方面存在显著差异,以下是对两者区别的详细阐述。
2025-01-07 15:47:282849 ICM-42670-P 高性能 6 轴 Motion跟踪® IMU *附件:ICM-42670-P 数据手册 替代MPU6050.pdf *附件:IMU PCB 设计和 MEMS 组装指南.pdf
2025-01-06 19:09:445119 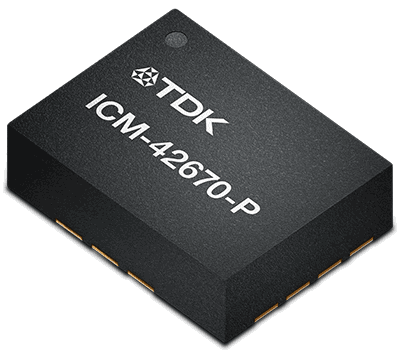
ER-FIMU-60低成本高精度光纤陀螺IMU(替代LN200)。它由全固态三轴光纤陀螺和三轴石英挠性加速度计、机身结构、数据接口板等部件组成
2025-01-06 13:57:11
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论