斗系统通过“空间星座+地面控制+用户终端”协同,以伪距测量和空间后方交会实现高精度定位。文章详解六大误差源及三层修正技术,涵盖开放、授权与增强三类定位模式,精度从米级至厘米级。结合UWB、蓝牙等技术,实现工业场景室内外无缝定位,广泛应用于导航、测绘、交通及安全管理。
2025-12-30 17:02:45 461
461 云翎智能RTK高精度定位铁路工作记录仪,以厘米级时空精度为针,将万里铁轨的每一寸脉络、每一处节点,都缝入智能守护的数字经纬——从北斗卫星的差分信号到惯性导航的航位推算,从电子围栏的实时预警到病害热力
2025-12-19 21:42:28616 
。 核心关系原理 高精度装置 (如 0.2 级、0.5 级):允许误差极小(≤±0.5%),核心元器件(高精度 ADC、标准互感器)的微小参数漂移就可能超出误差上限,导致数据失真 中精度装置 (如 1 级):允许误差适中(≤±1%),对漂移的容
2025-12-12 15:08:39122 
关口、新能源并网、电能质量纠纷仲裁等高精度测量场景。 一、核心谐波测量精度指标 参数类型 具体精度要求 适用条件 谐波电压幅值误差 ≤±(0.5% 基波幅值 + 0.1% 满量程) 一般情况 ≤±0.05
2025-12-11 11:22:49407 
信维合金电阻的精度误差范围通常为 ±1% ,部分高端型号可达到 ±0.5% 甚至更高精度(如±0.1%),具体取决于型号规格和应用场景需求。以下为详细分析: 一、精度误差的核心参数 典型精度等级 信
2025-12-02 14:36:02272 
:偏差范围±5%,标记中可能用字母 J 表示(如部分型号标注“J”即代表±5%)。 II级误差 :偏差范围±10%,标记中可能用字母 K 表示(如标注“K”即代表±10%)。 III级误差 :偏差范围±20%,部分型号可能直接标注误差范围(如“±20%”),而非
2025-12-01 15:23:29173 
LZ-DZ200 电能质量在线监测装置 一、A 类精度核心定位与技术特点 核心定位 :高精度仲裁级测量,数据具有法律效力,用于权威检测、贸易结算和责任判定 技术特点 : 电压测量误差:≤±0.1
2025-11-25 17:54:321709 
B 类精度(基础级精度)是电能质量在线监测装置的标准精度等级之一,主要适用于对测量精度要求不高、仅需基础监测功能的一般性场景。它在国家标准 GB/T 19862-2016 中明确定义,作为 A 类
2025-11-25 17:52:361591 
InertialLabs惯性产品概览美国Inertiallabs公司成立于2001年,是定位定向和惯性测量技术方面的领先企业,InertialLabs公司的产品和技术广泛地应用于商业、工业以及
2025-11-07 17:43:11590 
19862-2016 电能质量监测设备通用要求》,电流不平衡度测量精度分为两级: A 级(高精度装置) 误差范围 :≤±0.5%(如实际不平衡度为 5% 时,测量值在 4.5%~5.5% 之间)。 适用场景 :电网关口、新能源并网、半导体工厂等对精度要求极高的场景。 典
2025-11-06 09:38:18589 北斗高精度定位记录仪1.厘米级高精度定位技术技术原理:采用北斗/GPS双模卫星信号+RTK实时动态差分技术,结合惯性导航(IMU)和视觉里程计(VOM),在隧道内
2025-11-04 20:57:58201 
在工业自动化、结构健康监测或高精度导航系统中,是否常常因为传感器精度不够、稳定性差,而导致数据失真、系统误判?尤其是在振动测量、倾斜检测和惯性导航等关键应用中,一个可靠的高精度加速度计,往往是决定
2025-10-31 16:17:411416 
在高端惯性导航、精密平台稳定和机械设备监测领域,测量精度每次提升,都意味着系统性能的一次飞跃。当应用环境充满挑战,动态变化频繁,如何确保加速度测量数据始终稳定、可靠、超精准,成为工程师们面临的核心难题。答案,就藏在 ER-MA-6 超高精度MEMS加速度计 的卓越性能之中。
2025-10-30 15:16:18242 
可定制,适配工业设备、无人系统、军事领域三大场景,其陀螺仪零偏不稳定性≤3°/h、加速度计零偏稳定性≤0.2mg 的高精度表现,为商用导航
2025-10-29 16:21:26936 在精密测量要求日益严苛的今天,从航空航天到工业制造,无不依赖精准可靠的惯性测量技术。ER-QA-03A高性能石英加速度计正是这一领域的杰出代表,以其卓越的性能和可靠的品质,成为各类高精度测量系统中
2025-10-14 16:30:27273 
)的需求,针对性解决 “采样失真、算法泄漏、环境干扰、设备老化” 等核心误差源。以下是具体可落地的方法: 一、硬件优化:从源头提升谐波信号采集精度 硬件是谐波测量的基础,采样模块、信号调理电路的性能直接决定 THD 误差下限,需通过 “高精度选型
2025-10-13 16:29:34777 谐波总畸变率(THD)的误差范围需结合具体应用场景、设备精度及行业标准综合判断。以下是基于电力系统、工业设备及通用测量的关键指标解析: 一、电力系统谐波误差标准 1. 国标要求(GB/T
2025-10-13 16:25:08802 在惯性传感技术飞速发展的今天,ER-MA-6 MEMS加速度计以其微机电系统核心,将尺寸浓缩至指甲般小巧,却丝毫不减性能锋芒。这款产品专为测量重力引发的线性加速度而设计,集大量程、超高精度、高可靠性
2025-10-10 14:28:38268 
一、光纤陀螺仪与惯性导航系统简介 光纤陀螺仪是一种基于光学传感技术的精密仪器,利用Sagnac效应来检测旋转角速度。与传统的机械陀螺仪相比,光纤陀螺仪具有全固态、无旋转部件和摩擦部件、寿命长、动态
2025-10-09 10:29:54323 
精度、GNSS失锁后精度保持能力三个维度,对比二者精度特性差异,剖析技术逻辑与场景适配边界,为高精度导航场景选型提供支撑。 一、姿态与航向精度:实时稳定性与动态适配性的分化 欧洲某著名惯导公司的产品以“低噪声惯性器件优化”为核心,RTK模式下横
2025-09-08 09:51:50627 在组合导航领域,航向角精度是设备的生死线,无论是低空无人机航拍的影像拼接,还是测绘工程的方向基准校准,一丝航向误差都可能导致最终成果偏离规范要求。同为MEMS组合导航方案,为何部分产品航向精度仅能
2025-09-02 14:29:59522 陀螺仪是一种用于测量旋转角速度的仪器,广泛应用于惯性导航、飞行控制、姿态控制等领域。它利用陀螺效应来实现测量,即当一个陀螺体在自由旋转时,其角动量在空间中保持不变。当陀螺体受到外力作用时,会产生一个力矩,使其继续保持旋转状态,并且在其旋转平面内产生一个进动运动。
2025-08-27 16:22:30698 MEMS惯性传感器都有哪些种类?MEMS惯性传感器有哪些特点,下面火丰精密小编为你讲解一下:
MEMS惯性传感器包括MEMS陀螺仪及MEMS加速度计,其分类有多种方式,根据精度由低到高其可分为消费级(零偏>100°/h)和战术级(零偏0.1°/h ~ 10°/h)。
2025-08-26 17:39:27859 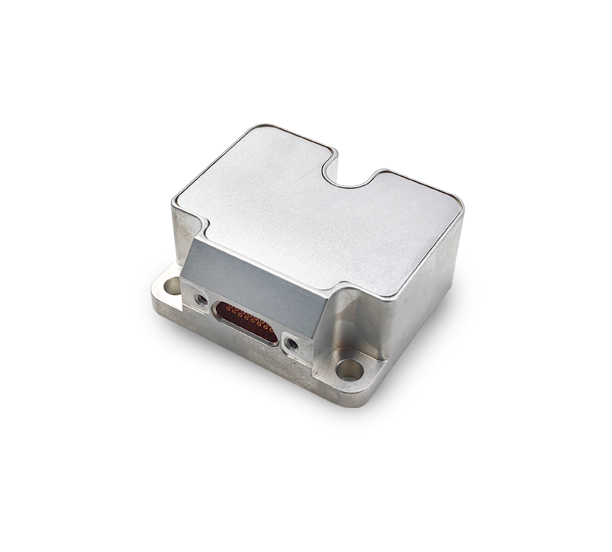
国产前20家MEMS惯性传感器厂商汇总,火丰精密入选榜单惯性传感器作为能够检测被测物体惯性力,进而测量其加速度、角速度及相应运动状态变化的关键部件,广泛应用于从消费电子到航空航天等诸多领域。无论是智能手机的屏幕旋转,还是火箭、飞机的导航,都离不开惯性传感器的精准感知。
2025-08-26 17:05:012668 
装置,MEMS惯性器件的指标需要能体现其测量的精度,测量的稳定性以及应用时对环境的适应性。致谢:文章参考记忆的抽屉官微。爱普生六轴惯性测量单元(IMU)IMU(I
2025-08-19 14:20:15824 环境下“掉链子”,要么因精度不足限制作业效率,而ER-GNSS/MINS-01 MEMS组合导航系统的出现,以“卫星+惯性”的深度融合技术,为大型无人机装上了“精准大脑”,让高精度作业从“理想”变为“常态”。 测绘级精度:让无人机成
2025-08-18 15:14:43763 在当今科技日新月异的时代,导航技术的革新正引领着各行业的智能化转型。为了满足市场对高精度、高可靠性导航系统的迫切需求,我们隆重推出全新的GNSS组合导航系统ER-GNSS/MINS-01。该系统融合
2025-08-15 16:15:26632 GNSS/INS惯系统(GNSS/INS,GlobalNavigationSatelliteSystem/InertialNavigationSystem)是一种将全球导航卫星系统(GNSS)与惯性
2025-08-14 19:33:35912 
高精度压电纳米位移台:AFM显微镜的精密导航系统为生物纳米研究提供终极定位解决方案在原子力显微镜(AFM)研究中,您是否常被这些问题困扰?→样品定位耗时过长,错过关键动态过程?→扫描图像漂移失真
2025-08-13 11:08:56924 
扫描白光干涉术的快速发展,在制造业与科研领域的广泛应用中得到了验证,某种程度上成为了高精度表面形貌测量技术的标杆,尤其在半导体、精密光学、消费电子等产业的牵引下,其测量功能和性能得到持续提升。本期美
2025-08-05 17:53:531254 
在工程机械、卫星通信、桥梁监测等领域,精准的运动感知和姿态测量至关重要。ER-3MG-052 高性能导航三轴MEMS陀螺仪,凭借其紧凑设计、卓越精度和强悍的环境适应性,成为各类惯性导航和姿态测量
2025-08-04 15:27:45738 
在无人机自主避障、智能车辆高精度定位、水下航行器路径规划等复杂场景中,导航系统的可靠性与精度直接决定成败。然而,单一导航系统在面对动态环境时往往力不从心——GNSS易受遮挡干扰,惯性导航难以规避累积
2025-08-01 14:41:08628 ER-GNSS/MINS-01 MEMS组合导航系统应运而生,它将卫星定位与惯性导航完美融合,为测绘级精度的导航信息提供了可靠保障,堪称市面上采用MEMS技术组合导航系统中的精度王者。
2025-07-28 17:02:50762 
在自动驾驶、无人机航拍、海洋测绘等高精度定位领域,极小的误差可能带来巨大风险。单一导航方式(如GNSS、惯性导航等)已难以满足复杂场景需求,ER-GNSS/MINS-03组合导航产品通过多传感器融合技术,正成为行业的新宠。但这类产品是否真的“全能”?今天我们就来揭秘它的优缺点。
2025-07-25 15:30:35424 
校准不当或环境因素,具有重复性;而随机误差则由随机噪声引起,呈现离散分布。本文将通过数学建模揭示这些误差的本质,并讨论高效分离方法,为提升测量精度(如电流测量中的数值稳定性)提供理论支持。接下来,我们将深入探讨建模
2025-07-25 09:36:16856 每次提到自动驾驶硬件时,大家可能第一反应想到的是激光雷达、车载摄像头、毫米波雷达等,但想要让自动驾驶车辆实际落地,有一个硬件也非常重要,那就是惯性导航系统。在很多讨论自动驾驶技术的内容中,惯性导航系统的出场频次远低于激光雷达、车载摄像头等硬件,那惯性导航系统到底是个啥?这个硬件可以不用吗?
2025-07-24 18:12:271682 
,结合高可靠性MEMS惯性测量单元(IMU),以更低的成本提供厘米级定位、0.1°姿态与航向精度,成为低成本高精度导航的理想选择。
2025-07-24 15:06:02459 
ER-GNSS/MINS-05组合导航系统应运而生,它以技术创新和系统优化实现了性能与成本的完美平衡。该系统深度融合惯性与卫星数据,提供包含位置、速度、姿态和航向的全参数导航信息,定位精度可达厘米级
2025-07-23 15:38:58467 
在现代化作业场景中,高精度、高可靠性的导航系统已成为各领域不可或缺的核心设备。ER-GNSS/MINS-01 MEMS组合导航系统作为一款将卫星定位与惯性测量技术融合的创新产品,犹如一颗璀璨的新星
2025-07-21 15:57:05848 
在无人机自主飞行的核心技术链条中,惯性测量单元(IMU)的精度与可靠性直接决定了整机的控制上限。高精度IMU对无人机系统的提升是全方位的,尤其在导航精度、稳定性、自主性和可靠性等关键性能方面。它通常是实现专业级和工业级无人机应用的核心传感器之一。
2025-07-21 15:39:28631 博世即将推出全新一代MEMS惯性传感器——SMI980与SMU300,这是公司首次发布高性能六轴惯性传感器系列。该产品可广泛应用于辅助驾驶系统、高精定位、车载导航等场景,为车辆提供更加稳定、连续的运动感知能力。
2025-07-17 17:03:051280 设计理念,采用战术级 MEMS 惯性器件,在实现高精度组合导航信息输出的同时,有效控制了成本,为航空、陆地等众多应用场景带来了全新的导航解决方案
2025-07-15 17:29:57593 
影响,精度波动控制在±10%内(如JG01-SG100保持±0.022mm)。
二、振动影响的关键因素
1.被测物摆动
1.深井泵管检测中,JG01-SG165允许被测物摆动±7mm,但超出范围会导致
2025-07-15 15:15:10
要素。ER-GNSS/MINS-01 MEMS组合导航系统应运而生,它将卫星定位与惯性测量技术完美融合,为测绘、交通、海洋等多个行业提供了测绘级精度的导航信息。
2025-07-14 16:44:05598 
当自动驾驶精准停入暴雨中的车位,无人机穿越城市峡谷锁定目标,AUV在无卫星信号的海底保持航向——这些场景的背后,是组合导航技术在默默支撑。它融合卫星、惯性等多源数据,重新定义了人类对时空的掌控力。但为何它能在众多导航方案中脱颖而出?
2025-07-11 16:21:53691 
无论是自动驾驶汽车、无人机巡检,还是精准农业、飞行记录仪,高精度、高可靠的导航都是核心需求。然而,传统导航技术各有短板:卫星导航(GNSS):信号易受遮挡(如城市峡谷、隧道),且易受干扰或欺骗。惯性导航(INS):自主性强,但误差随时间累积,几分钟后定位漂移。
2025-07-10 16:58:20804 
在导航技术领域,GNSS(全球导航卫星系统)和INS(惯性导航系统)的结合,一直被业界誉为"黄金搭档"。它们优势互补,克服了单一系统的局限性,为高精度、高可靠性的导航提供了完美
2025-07-09 17:12:01743 在现代导航技术中,单一的导航系统往往难以满足高精度、高可靠性的需求。全球导航卫星系统(GNSS)虽然能提供全球覆盖的定位信息,但在城市峡谷、隧道或电磁干扰环境下,其信号容易丢失或受到干扰。而微惯性
2025-07-08 15:26:37661 
在无人机测绘、智能驾驶、水文测量等高精度定位领域,传统导航系统往往受限于卫星信号遮挡或惯性传感器的漂移误差。ER-GNSS/MINS-01 MEMS组合导航系统突破技术瓶颈,将全频点GNSS与导航级
2025-07-07 15:35:251284 
在自动驾驶、无人机飞行和航空导航等领域,高精度、高可靠性的定位与姿态测量至关重要,但传统方案往往因双天线设计或高成本IMU而难以普及。ER-GNSS/MINS-07组合导航系统突破这一瓶颈,以单天线
2025-07-04 15:05:09492 
在自动化、无人系统和精准农业等领域,高精度导航是核心需求,但传统高端组合导航系统的高成本往往让许多用户望而却步。ER-GNSS/MINS-05作为一款低成本组合导航系统,通过技术优化与精准性能平衡
2025-07-03 15:16:48664 
直线模组的精度是非常重要的指标,尽可能减少精度误差,才能让发挥出直线模组所在设备的稳定性。
2025-06-30 17:53:18905 
激光锡焊的发展越来越成熟,已经广泛的应用在生产工程中,其中特别是汽车行业,芯片行业等,汽车电子中控导航主板激光焊接是一种用于将主板上的电子元件或线路连接起来的先进焊接技术。松盛光电来介绍激光锡焊在汽车电子中控导航主板的应用,来了解一下吧。
2025-06-27 14:42:521419 
MEMS 惯性 器件 ✅ 高可靠MEMS陀螺仪: 零偏不稳定性 角度随机游走 → 确保姿态角漂移速率极低 ✅ 高精度MEMS加速度计: 零偏不稳定性 宽温区补偿(-40℃~+80℃) → 抑制速度/位置推算误差 ▶ 结果:在GNSS信号丢失时,系统可依赖IMU物理层数据维持短时高精度输出,为算法争
2025-06-25 17:35:04503 失效,成为制约性能的瓶颈。单一系统无法满足复杂环境下的严苛需求。 突破极限,精度再进化!我们的ER-GNSS/MINS-01 MEMS组合导航系统。它将卫星定位的绝对精度与惯性导航的自主连续性完美融合,采用顶尖MEMS传感器技术,实现了MEMS组合导
2025-06-23 09:20:51461 在无人机技术日新月异的当下,在无人机复杂的系统架构中,导航精度直接决定了其飞行的安全性、任务执行的准确性与效率,成为制约无人机性能提升的关键因素。爱普生M-G370PDS是一款高性能的惯性测量单元
2025-06-19 15:53:01559 
在现代导航技术领域,惯性导航系统(INS)扮演着至关重要的角色,特别是在与全球导航卫星系统(GNSS)结合使用时,能够提供连续、可靠且高精度的定位、速度和姿态信息。
2025-06-18 17:43:55875 在现代导航技术领域,惯性导航系统(INS)扮演着至关重要的角色,特别是在与全球导航卫星系统(GNSS)结合使用时,能够提供连续、可靠且高精度的定位、速度和姿态信息。 惯性导航系统的基本原理 惯性
2025-06-18 17:18:181147 振弦式应变计作为工程结构安全监测的核心工具,其安装精度直接影响数据的可靠性和长期稳定性。在水利大坝、桥梁隧道、深基坑等场景中,安装误差可能导致监测数据失真,进而影响工程安全评估。南京峟思将为大家解析
2025-06-13 12:01:42375 
Bosch Sensortec 最新推出的 BMI330 惯性测量单元 (IMU),正是为工业自动化、机器人、导航及智慧农业等场景量身打造的紧凑型高能效解决方案。该传感器可在 105°C 高温环境下持续稳定工作,在扩展耐用性的同时确保性能零妥协。
2025-06-07 15:05:521616 GNSS+INS的组合导航技术,以其卓越的可靠性和环境适应性,已成为高精度导航的核心解决方案。那么, GNSS + INS的精度究竟能达到多高? 以测绘级系统ER-GNSS/MINS-01为例,其
2025-06-04 16:31:55674 导航系统,该系统可以为我们的客户给予经济高效的惯性传感技术。该技术虽为航空航天应用领域而开发设计,但它基本上可以被集成到任意架构中。”拥有了新一代惯性导航系统HGui
2025-06-04 11:09:36890 
霍尼韦尔最近发布了一款由其中国本土研发团队倾力打造并生产的hguideo360c惯性和全球导航卫星系统(gnss)融合的导航板卡。这一创新举措旨在助力中国客户提升自动化水平,同时推动自动驾驶及移动
2025-05-29 15:18:53725 在现代导航定位领域, 全球导航卫星系统( GNSS) 和 惯性导航系统( INS) 是两大核心技术。它们各自拥有独特的优势,但也存在一定的局限性。那么,它们究竟有何不同?如何结合使用以实现更稳
2025-05-27 15:46:131513 重型机床加工精度面临磁性编码器非线性误差挑战,误差来源包括磁栅刻划误差、磁头偏心及温度漂移。创新补偿技术如双读头差分、智能算法及双反馈系统,将定位误差控制在微米级,推动国产编码器技术从跟跑到并跑。
2025-05-16 17:29:421070 绝对位置感知技术通过实时精确获取关节位置,消除累计误差并提升系统可靠性。结合改进的ICP算法和智能补偿策略,六轴机器人重复定位精度达±0.03mm,轨迹误差仅为传统控制的1/5,满足航空航天级精密装配需求
2025-05-16 17:27:06702 
目前,测量仪器的精度表示方法一般是“相对误差”或者是“引用误差”,相对来说市面上采用“引用误差”表示方法的仪器占大部分,而WP4000变频功率分析仪是目前市面上唯一一款采用“相对误差”的仪器。那么
2025-05-13 09:58:19544 组合导航系统集成了MEMS 惯性导航与多频点双天线 GNSS ,凭借其高精度、高可靠性和强适应性,成为航空、陆地及航海复杂场景下的理想选择。ER-GNSS/MINS-03结合智能算法,能提供连续、稳定的定位、姿态和速度信息,在卫星信号受限的环境中,也能保持短时间工作。
2025-05-09 16:13:29583 低空经济中的eVTOL(电动垂直起降飞行器)无人驾驶飞行机需要高度可靠、高精度的惯性导航系统(INS)来保障飞行安全与效率
2025-05-06 18:02:50827 
手工抛光制作测试板(T)进行面形偏差测量的传统技术(该检测装置也见于斐索干涉仪中)。
被测表面(S)的面形误差(表面高度H)是通过将表面的形状与测试板(T)的标准形状(通常精度<1/20波长)进行对比
2025-05-06 08:45:53
ER-GNSS/MINS-07具备高可靠性的MEMS惯性测量单元,集成了单天线全系统双频定位卫星模块,是一款低成本组合导航系统。搭载组合导航融合
2025-04-23 15:17:00
ADXL355使用内部时钟,采样率ODR设置为125HZ,但通过DRDY引脚测试出数据输出采样率大概在125~126hz左右,与设定的125hz会稍微偏差大一点,我想咨询一下我们这款ADXL355传感器使用内部时钟时,其内部时钟的精度或者误差为多少呢?
2025-04-16 07:18:02
当地图导航与AI深度融合,一场关于出行效率与体验的革命,正在悄然发生。
2025-04-15 17:01:191191 AGV无人自动叉车作为制造业工厂智能物流核心设备,其导航技术直接影响作业效率、灵活性和场景适应性。目前主流导航方式包括磁导航、激光导航、视觉导航、惯性导航、二维码导航及激光SLAM导航,各类技术各有
2025-03-21 17:09:19734 
如今,精准导航已成为智慧出行不可或缺的核心要素,为满足日益增长的精准定位需求,海积信息推出的高精度组合导航终端,可以完美实现高精度定位,开启智慧驾驶新时代。
2025-03-20 10:40:46854 介绍 ER-FINS-40是一款高精度高可靠性光纤陀螺仪和石英加速度计的组合导航系统,内部集成了双天线全系统全频点定位定向卫星模块。搭载了组合导航
2025-03-19 17:35:07
关键字:光电式旋转测径仪,旋转测径仪,旋转式光电测径仪,旋转式光电测头,蓝鹏测径仪,蓝鹏旋转测径仪
光电式旋转测径仪在测量过程中消除误差的关键方法结合了硬件设计优化、动态补偿技术和智能算法,具体通过
2025-03-17 15:54:42
爱普生推出型号为M-G370PDF的高稳定性、高精度及极小尺寸封装的IMU惯性测量单元,可广泛应用于工业系统的各个领域。为了节省PCB的面积和产品空间,M-G370PDF惯性测量单元设计精巧,且具有
2025-03-06 16:52:12693 
在关键任务中遇到GNSS信号不稳定或信号中断的问题?**ER-GNSS/MINS-01** 来了——这是一款测绘级超高精度组合导航系统,结合了GNSS + MEMS INS,即使在最严苛的环境中也能提供无与伦比的精度、可靠性和连续性。
2025-02-28 14:41:41895 (UAV)/自主水下航行器(AUV)以及导航级MEMS系统中的精确姿态与方位测量、定位、导航和制导而设计。ER-MG2-300/400具有高动态测量范围和高精度,
2025-02-28 09:57:49
、安全报警、消费类应用、运动识别和状态记录等领域。加速度计与陀螺仪和磁力计相结合,形成惯性测量单元(IMU)。应用惯性测量:惯性制导、过载测量、组合导航倾斜测量:
2025-02-27 14:39:56
振弦式传感器中量程误差和绝对误差表示什意思?在振弦式传感器的性能指标中,量程误差和绝对误差是评估传感器测量精度的重要参数。今天南京峟思就对这两个概念为大家解释一下:量程误差:是指传感器在整个测量
2025-02-21 14:11:22841 
在当今快节奏的世界中,导航的精准性和可靠性是不容商榷的。虽然GNSS在开阔的环境中表现出色,但在城市峡谷、隧道或信号中断等情况下,仍需要一个强大的后备方案。INS应运而生,它利用高性能的MEMS
2025-02-20 16:45:541255 《案例解说PLC、触摸屏及变频器综合应用》是2013年中国电力出版社出版的图书,作者是陈洁。该书以通俗易懂的方式讲述PLC、触摸屏及变频器的基本原理,并以西门子S7-200系列PLC、TP170B触摸屏及MM440、MM430变频器作为实际案例来讲述PLC、触摸屏及变频器的
2025-02-19 09:43:541537 在对精度和可靠性有着严格要求的应用环境中,**ER-MIMU-15** 重新定义了高性能惯性传感。专为航空航天、航海以及高级导航系统而设计,这款紧凑型的高性能设备在动态场景中提供了无与伦比的精准度。
2025-02-19 09:30:04777 惯性传感器是一种利用物体惯性效应来测量加速度、角速度等运动参数的传感器。随着微机电系统(MEMS)技术的快速发展,惯性传感器已经广泛应用于汽车、航空航天、消费电子、工业自动化等多个领域。本文将详细介绍惯性传感器的原理、分类、工作原理、应用领域以及未来发展趋势。
2025-02-03 14:20:005468 惯性测量单元(Inertial Measurement Unit,简称IMU)是一种能够测量物体运动状态的装置,广泛应用于定位、姿态测量和导航等领域。IMU通过内部集成的传感器,能够实时、准确地获取
2025-02-03 14:19:003128 在现代导航领域,GNSS依靠卫星信号定位,信号易受干扰;INS依赖内部传感器推算,误差会随时间累积。而ER-GNSS/MINS-01,这款组合导航产品将二者创新性结合,GNSS修正INS误差,INS维持GNSS信号不佳时的导航连续性,确保全场景稳定精准导航。
2025-01-21 15:54:01904 测量精度。特征小型化IMU低功耗高性价比全面温度补偿应用领域惯性导航:惯性制导,综合导航,平台稳定短期导航:飞行控制、弹道修正、遥测和遥控姿态控制:无人机,天线方
2025-01-16 14:00:46
几个误差项,有的是正负对称误差,有的是正误差,如何算合成总误差?
2025-01-13 07:06:35
智能导航系统依赖于高精度的环境感知和数据分析来实现其导航功能。数据采集标注通过对原始数据进行精确的处理和标记,为智能导航系统提供了可靠的数据基础。这些数据涵盖了道路信息、交通标志、障碍物、车辆、行人等多种元素,是智能导航系统进行路径规划、避障、定位等核心功能的基础。
2025-01-10 17:01:151072 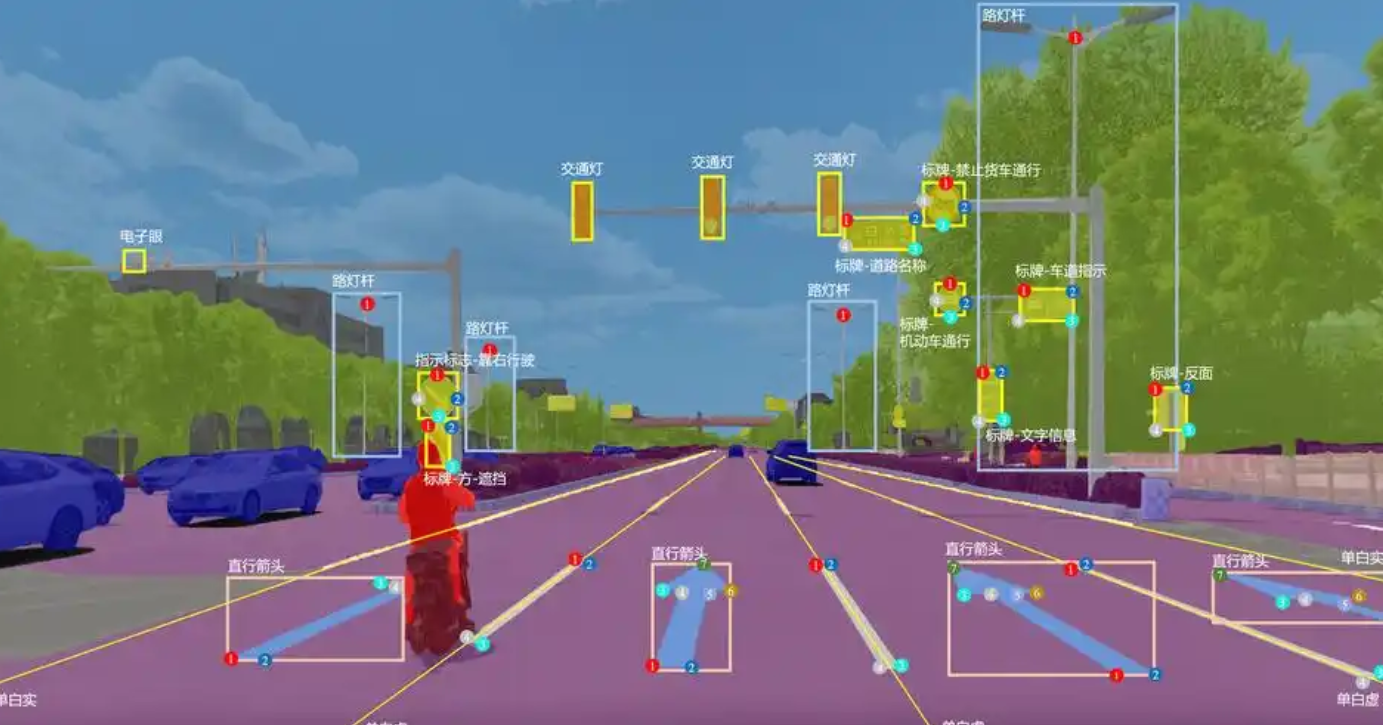
智能导航系统依赖于高精度的环境感知和数据分析来实现其导航功能。数据采集标注通过对原始数据进行精确的处理和标记,为智能导航系统提供了可靠的数据基础。这些数据涵盖了道路信息、交通标志、障碍物、车辆、行人等多种元素,是智能导航系统进行路径规划、避障、定位等核心功能的基础。
2025-01-10 16:53:111627 
日前,上海司南导航技术股份有限公司(以下简称司南导航)正式发布“第四代高精度GNSSSoC芯片QC7820”。该款创新产品采用SoC设计,基于22nm低功耗工艺,集GNSS基带、射频、电源、处理器
2025-01-09 13:08:511291 
ER-3MG-03/03迷你 高精度导航/稳定控制MEMS陀螺仪体积小、重量轻、结构简单、可靠性好。三轴陀螺仪的最大功能是可以提供判断物体运动
2025-01-08 10:27:07
ER-FINS-50是一种高性能、超紧凑的GNSS +光纤陀螺仪惯性导航系统。组合导航系统内置具有Feiner经纬度的高性能GNSS板,支持
2025-01-07 09:39:24
的角速度和线加速度;对温度、安装不对中角、非线性、零位等进行误差补偿;自动搜索并输出真北航向;提供立体姿态;为载波姿态和导航控制提供信息,测量结果通过RS422串口
2025-01-07 09:36:36
ER-FINS-98型光纤陀螺惯性导航系统(PHINS的替代品)采用三轴光纤陀螺感知角运动,并按载波运动角速率的比例输出数字信号;利用石英
2025-01-07 09:33:34
C3级电子称重传感器以其高精度和可靠性,在各个领域得到了广泛应用。在实际使用过程中,传感器仍可能受到各种因素的影响而产生误差。通过采取有效的应对措施,如温度补偿、定期校准、电磁屏蔽和选用高质量传感器等,可以最大限度地减小误差,提高测量准确性。
2025-01-06 15:21:11878 ER-FIMU-50 光纤IMU是用于导航、控制和动态测量的低成本惯性测量设备。该系统采用高可靠性闭环光纤陀螺和加速度计,并通过多种补偿技术确保
2025-01-06 13:52:43
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论