 LOG-LIO: 一种高效局部几何信息估计的激光雷达惯性里程计方法
LOG-LIO: 一种高效局部几何信息估计的激光雷达惯性里程计方法

摘要
局部几何信息即法线和点分布在基于激光雷达的同时定位与地图构建(SLAM)中是至关重要,因为它为数据关联提供了约束,进一步确定了优化方向,最终影响姿态的准确性。然而即使在使用KD树或体素图的辅助下,估计法线和点分布也是耗时的任务。为了实现快速法线估计,我们研究了激光雷达扫描帧的结构信息,提出了一种新颖的快速近似最小二乘(FALS)方法,通过预先计算的方位角信息,当新的扫描帧到达时,估计法线仅需要点的距离信息,为了高效估计点的分布,我们将ikd树扩展到体素管理地图,并在保持法线一致性的同时增量更新其点云分布。对于满足基于法线的可见性和一致性检查的扫描点,我们设计了一种稳健且准确的分层数据关联方案,其中点到曲面的关联优先于点到平面的关联,在分布趋于收敛后,我们进一步固定体素以平衡时间消耗和表示的正确性,在多样的公开数据集上进行的大量实验表明,与其他先进方法相比,我们的系统具有明显优势。
主要贡献
地图体素内逐步更新点云分布以保持空间信息的正确性,同时与法线保持一致性。为了平衡时间消耗和表示的正确性,我们在扩展的ikd树上管理地图,并在分布收敛后进一步固定分布。本工作的主要贡献如下:
Ring FALS一种利用特定激光雷达的结构信息的新型快速近似最小二乘法法线估计器,与PCL相比快速而准确,满足LIO系统的实时要求。
考虑地图体素内点分布的鲁棒且准确的分层数据关联方案,其中点到曲面的关联优先于点到平面的关联,大尺度优先于小尺度。
对公共数据集进行广泛实验,证明我们的LIO系统相对于其他最先进的方法具有优势。为了使社区受益,该工作实现已在 https://github.com/tiev-tongji/LOG-LIO 开源,还将Ring FALS作为独立的法线工具开源在 https://github.com/tiev-tongji/RingFalsNormal。
主要内容
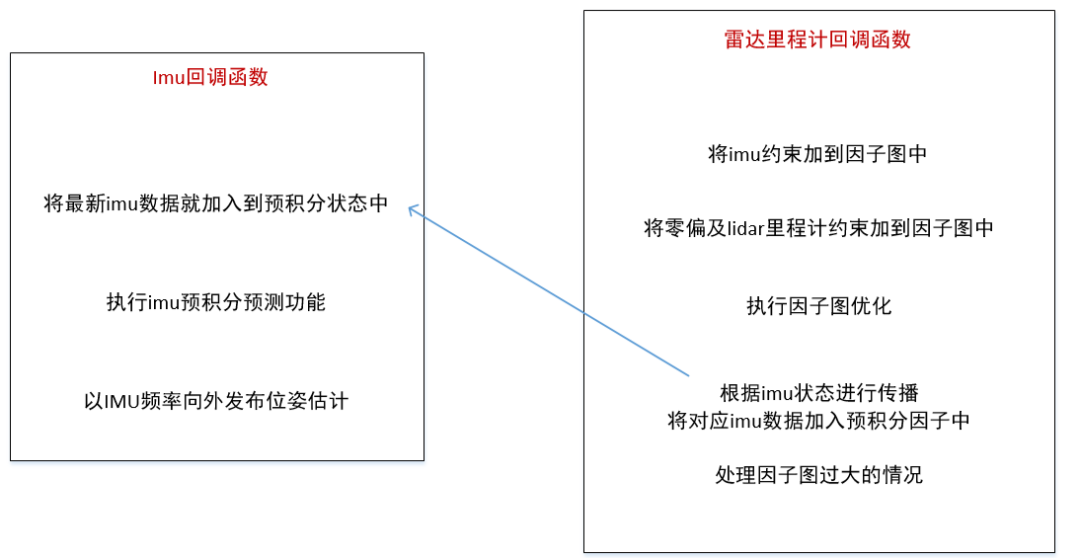
LOG-LIO的流程接收来自3D激光雷达和惯性测量单元(IMU)的输入,如图2所示。对于新的输入扫描,我们首先使用Ring FALS来估计原始点的法线,在使用IMU测量校正畸变后,根据它们的局部几何信息,在未畸变的点云和地图之间执行关联。我们通过iEKF整合IMU的测量,并通过类似FAST-LIO的方法优化机体的姿态,在优化之后,新的点被添加到由扩展的ikd树管理的地图中,地图体素内的分布在考虑法线的同时进行增量维护,以确保其准确性,并在收敛后进行固定。
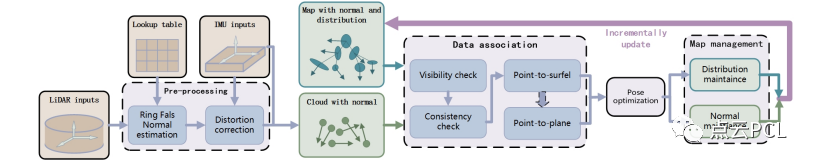
图2. LOG-LIO系统概述
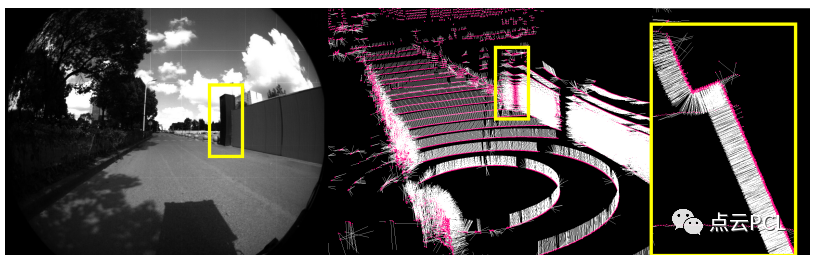
图3. 白色线条表示来自 Ring FALS 估计的法线
实验
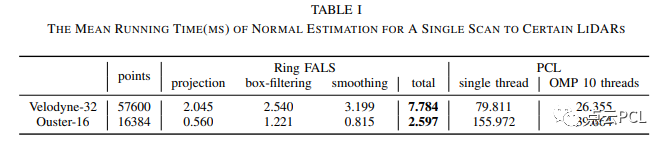
表 I 显示了用于 M2DGR 和 NTU VIRAL 数据集中 Velodyne-32 LiDAR 的单次扫描的平均法线估计处理时间。对于 Velodyne-32 LiDAR 的单次扫描约有 57,600 个点,与 PCL 相比,Ring FALS 的耗时仅为十分之一,与 OMP 版本相比甚至只有四分之一。对于 Ouster16 LiDAR,无论是单线程还是 OMP 版本,Ring FALS 的时间消耗都远小于 PCL,分析 PCL 的结果,尽管 Ouster-16 LiDAR 的点数少于 Velodyne-32,但耗时反而增加,原因是 PCL 法线估计中最耗时的部分之一是 KDtree 邻域搜索,这与 KDtree 的结构有关。
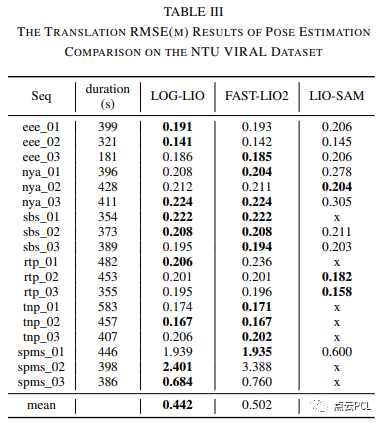
表格 II 报告了实验结果,可以看出,在室内场景中,LOG、LOG-C 和 FAST-LIO2 的轨迹准确性接近,并在大多数序列中优于 LIO-SAM。
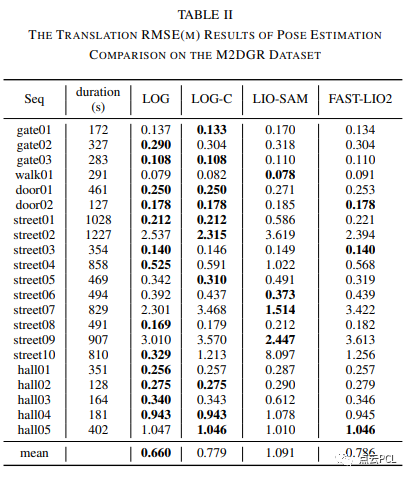
图4显示了数据集street10 的轨迹,进行了定性比较,LOG 的出色表现证明与稀疏点场景中的地图体素关联更好地表示了局部几何信息。
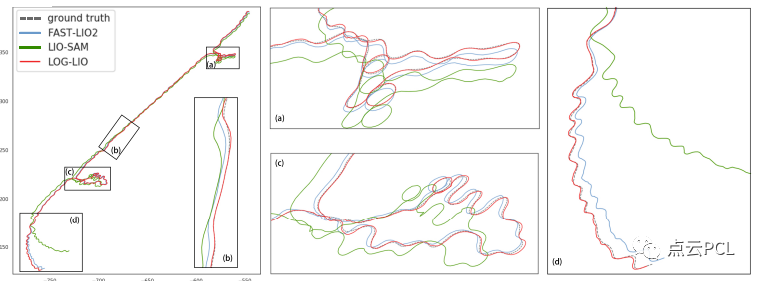
图4. M2DGR 数据集序列 street10 中的定位估计,放大的彩色框图像对应于轨迹中相同颜色的框。LOG-LIO 在大多数实验中获得最佳结果,紧随其后的是 FAST-LIO2,而由于 LiDAR 点云和地图的稀疏性,LIO-SAM 更容易失败,如表格 III 所示
每个序列中 LOG-LIO 和 FAST-LIO2 的平均耗时,如表 IV 所示。

总结
本文提出的LOG-LIO是一种在线激光雷达惯性里程计法,它结合实时的法线和点分布估计来准确表示局部几何信息。同时还提出了一种高效的激光雷达点云法线估计方法,名为 Ring FALS,它预先计算了方位信息并仅利用距离信息来估计点的法线,LOG-LIO 通过扩展的 ikd-tree 管理地图,并在地图体素内逐步维护法线和点分布,分层数据关联方案提供了精确的约束,从而实现更准确的姿态估计,在各种环境中,LOG-LIO 在实验中表现出色,优于现有的 LIO 系统。
-
激光雷达
+关注
关注
983文章
4595浏览量
197409 -
数据集
+关注
关注
4文章
1242浏览量
26301 -
LIDAR
+关注
关注
11文章
369浏览量
31645
原文标题:LOG-LIO: 一种高效局部几何信息估计的激光雷达惯性里程计方法
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
【CIE全国RISC-V创新应用大赛】+基于MUSE Pi Pro的3d激光里程计实现
激光雷达分类以及应用
常见激光雷达种类
如何理解SLAM用到的传感器轮式里程计IMU、雷达、相机的工作原理与使用场景?精选资料分享
计算机视觉方向简介之视觉惯性里程计

一个利用GT-SAM的紧耦合激光雷达惯导里程计的框架
一种R3LIVE++的LiDAR惯性视觉融合框架
一个利用GT-SAM的紧耦合激光雷达惯导里程计的框架
介绍一种基于编码器合成里程计的方案

基于相机和激光雷达的视觉里程计和建图系统

LIO-SAM框架是什么
一种新型激光雷达惯性视觉里程计系统介绍




评论