本文为创龙科技DR1M90 评估板的 IgH EtherCAT 主站应用案例,基于 Linux-RT 内核与开源协议栈,实现伺服电机正反转实时控制。案例通讯周期 1ms,支持电机 0-10000(正
2026-01-04 15:40:03 63
63 
力矩电机式调节仪表作为一种精密的控制装置,在现代工业自动化领域扮演着重要角色。其核心在于通过力矩电机的独特性能实现对各类参数的精确调节,这种控制方式融合了机电一体化技术、自动控制理论和现代传感器技术
2025-12-22 18:26:29991 的选型指南,帮助您的高精度雕刻设备找到最合适的电机驱动芯片。在选择之前,请先问自己几个关键问题:设备精度要求有多高?工作负载有多大?对运行噪音敏感吗?控制系统复杂度如
2025-12-16 15:39:23228 
工作原理、调速分类及技术特点三个维度展开系统阐述。 一、交流伺服电机的工作原理与结构特性 交流伺服电机本质上是一种采用闭环控制的交流电动机,其运行机理基于电磁感应定律。定子绕组通入三相交流电后产生旋转磁场,带动
2025-12-13 07:37:34200 
TMC4671:硬件实现FOC伺服控制要“集成+灵活”?做伺服项目时,大家总希望芯片既能装下核心功能,又能应对不同电机需求——而TMC4671这款完全集成的伺服控制芯片,刚好踩中了“集成”与“灵活
2025-12-10 17:48:28163 伺服电机增益调节是运动控制中的核心环节,直接影响系统的响应速度、稳定性和精度。本文将深入解析增益参数的作用机理、调节方法及典型应用场景,帮助工程师实现伺服系统的最佳性能匹配。 一、增益参数
2025-12-08 07:42:00614 移动电源应用里,国产电容有没有成功取代日系品牌(如松下、贵弥功)同尺寸高容值电容的案例?
2025-12-06 13:22:08
的精准调控,避免传统驱动方式下定位偏差较大、运行卡顿等问题,为泡沫起升仪的高效作业提供可靠的动力控制支撑。 一、技术核心逻辑:从“粗放驱动” 到 “精细分解” 步进伺服电机的传统驱动方式,通常是按照电机固有
2025-12-04 09:20:40229 
伺服电机作为自动化控制系统的核心执行元件,其控制方式直接决定了设备的动态响应、定位精度和运行效率。随着工业4.0和智能制造的发展,伺服控制技术已从传统的模拟量控制演变为数字化、网络化的智能控制体系
2025-12-01 07:37:18427 
伺服系统,通过稳定传输特性消除连接环节对精准控制的干扰,成为伺服控制系统的可靠支撑。动力线保障电能稳定传输伺服动力线作为伺服驱动器与电机的电能传输载体,其稳定性直接
2025-11-28 08:03:33527 
同步电机控制方式及驱动技巧永磁同步电机在工业上用的相对较多。永磁交流伺服电机系统具有以下等优点:
电动机无电刷和换向器,工作可靠,维护和保养简单;
定子绕组散热快;
惯量小,易提高系统的快速性;
适应
2025-11-27 08:04:21
今天继续为大家介绍i.MX RT1180实现EtherCAT+伺服控制的终极实践:双电机控制与Ethercat资源使用。
2025-11-26 08:19:003706 
Parker提供了多款不同的伺服电机,性能各有不同,针对特定易燃易爆场所使用的防爆伺服电机,与普通通用伺服电机存在诸多区别,接下来就进一步看看Parker防爆伺服电机与普通伺服电机的区别
2025-11-20 13:36:27265 
上回我们介绍了EtherCAT是如何利用SSC产生的sync信号,与电机控制系统完成同步的,如此我们即可保证整个控制系统的同步性能伺服控制。在此基础上,伺服电机的实时精确控制要求电机控制系统具有较高的响应带宽,其中,电机的电流环路设计对于系统带宽的提升,扮演着至关重要的角色。
2025-11-17 09:53:297032 
步进伺服电机作为工业自动化领域的关键部件,其稳定性和精度直接影响设备性能。然而在实际应用中,电机可能因参数配置、机械负载或环境因素出现异常。本文将针对六大典型问题提供系统性解决方案,结合工程实践
2025-10-30 07:41:26464 脉动小、更加平稳顺滑,因此广泛应用于对控制性能要求高的场合,如工业伺服系统、电动汽车驱动等。
二、 核心控制算法解析
六步换相法
l原理: 一种简单直接的控制方法。它将电机的电周期分为六个区间
2025-10-27 09:23:06
大家在运动控制的时候是用伺服电机的还是用步进电机做定位控制了?为什么有时候用伺服电机,有时候又步进电机?这是什么原因呢?本期我们就一起来探讨一下步进电机和伺服电机的区别!
2025-10-15 14:32:511496 
三菱伺服电机在工业自动化领域应用广泛,其高性能和稳定性备受认可。然而在实际使用过程中,部分用户可能会遇到电机运行时出现抖动或异常声响的问题。这类问题不仅影响设备运行精度,还可能缩短电机使用寿命。本文
2025-10-14 07:37:021053 舵机与伺服电机都属于 可精确控制的驱动装置 ,但二者在定义范围、结构组成、控制方式和应用场景上存在显著差异,并非完全等同(舵机是伺服电机的 “特殊子集”)。以下从核心维度展开对比,帮助清晰区分: 一
2025-10-13 10:21:071164 伺服电机作为自动化控制系统中执行元件的核心部件,其制动性能直接影响设备的定位精度和安全可靠性。目前主流的伺服电机制动方式包括动态制动、再生制动和电磁机械制动三种,它们在制动原理、应用场景及技术特点上
2025-09-19 18:26:111302 
介绍基于单颗i.MX RT1180芯片的EtherCAT+伺服电机控制方案-伺服控制板硬件电路资源介绍,即为下图中的Servo Motor Driver Board。
2025-09-11 14:27:5974719 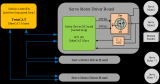
,且采用 Ethernet/IP协议 进行通信,能够高效地实现数据的快速传输与控制指令的下达。同时,为了实现精准的运动控制,选用了某知名品牌(如西门子)的伺服电机,该伺服电机性能卓越,采用 ProfiNet协议 与其他设备进行通信连接。但由于这两种设
2025-09-10 11:03:50548 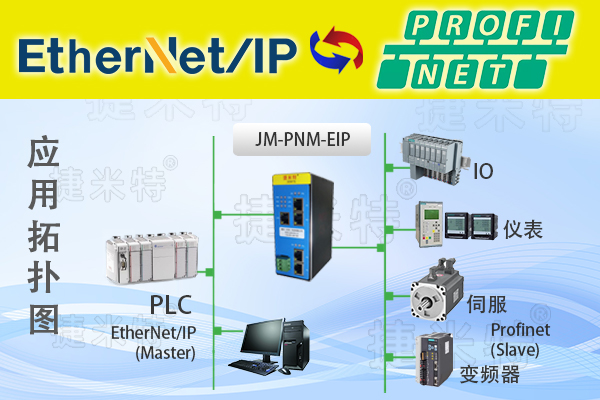
在某精密制造企业的测试与测量实验室中,需要对一款新型伺服电机进行性能测试。该实验室的核心控制系统采用基恩士(Keyence)PLC作为主站设备,其基于EtherCAT协议进行高速数据传输,能够实现对测试流程的精确调度和控制。
2025-09-06 14:13:10744 
随着工业自动化需求的提升,工业机器人已经广泛应用于各个生产环节,成为提升自动化水平和生产效率的重要工具。伺服电机作为工业机器人的核心部件,通过控制器对编码器反馈的位置信号进行反馈调节,从而精确
2025-09-01 10:01:02340 
精度和稳定性。伺服电机的启动和运行依赖于专门的伺服驱动器,而驱动器内部的控制电路负责精确控制电流。在此过程中,伺服电机驱动器中的电容器扮演着至关重要的角色,它们是
2025-08-30 10:57:24533 步进电机作为一种常见的执行元件,因其结构简单、控制方便等优点被广泛应用于工业自动化、机器人、医疗设备等领域。然而,传统的开环控制方式存在失步、振荡等问题,难以满足高精度应用场景的需求。本文将探讨
2025-08-27 17:55:08843 在精确控制电机速度和位置方面,脉冲控制是关键。今天,我们将探讨ZLG致远电子PCIe-1E16EtherCAT通讯卡如何通过脉冲控制实现高效电机驱动。脉冲控制脉冲控制是伺服系统中最常见的一种控制方式
2025-08-27 11:34:41569 
突破性解决方案。该芯片通过创新的磁感应技术和信号处理架构,实现了对电机转子位置的高速、高精度检测,从而显著优化了伺服系统的闭环控制性能。
2025-08-15 17:37:01823 随着工业自动化、机器人技术和高端装备制造的快速发展,伺服电机作为核心驱动部件,其控制精度和响应速度的要求不断提升。传统的伺服电机控制主要依赖于光电编码器或旋转变压器进行位置反馈,但这些技术在高转速
2025-08-05 17:44:44859 一、直线电机选择的核心考量因素 直线电机作为连接机械结构与精密控制的关键部件,其选型需结合应用场景的实际需求,综合评估多维度性能指标。首先是精度特性,包括定位精度与重复定位精度,不同行业差异显著
2025-08-04 19:11:13789 在工业自动化、机器人技术以及新能源汽车等众多领域,伺服电机控制系统都扮演着至关重要的角色。而测量电机的旋转角度,对于实现精确的运动控制起着决定性作用。今天,我们就来深入探讨一下MT6825磁编芯片如何为伺服电机控制系统带来全角度测量能力。
2025-07-29 16:40:39525 控制策略,针对永礁同步电机的对象特点,设计PD参数的不同隶属度画数。与常規PD仿真对比显示,该模糊自适应PID控制响应速度快,稳态精度高,抗抚动性能大大加强。
纯分享帖,点击下方附件免费获取完整
2025-07-29 16:16:56
伺服电机作为工业自动化、机器人、数控机床等高端装备的核心执行部件,其控制精度直接影响设备性能。传统光电编码器受限于机械结构易磨损、抗干扰能力弱等问题,难以满足高精度场景需求。而MT6825磁编码器
2025-07-28 17:20:50586 
伺服电机的运行需要一个参考点,这个参考点就是原点。原点通常是由光电开关或机械开关来确定的,其位置是固定的。当伺服电机运行时,控制器会根据原点的位置来计算电机的位置。如果没有原点,控制器就无法确定电机的位置,从而无法精确地控制机器的运动。
2025-07-26 09:43:403012 
在当今工业自动化飞速发展的时代,伺服电机控制系统作为众多设备的核心动力源,其性能的优劣直接影响着整个工业生产的效率和质量。而磁编芯片作为伺服电机控制系统中的关键组件,对于实现精确的角度测量和控制起着
2025-07-24 16:52:25607 摘 要:首先阐述了五种 PWM 调制方式的调速原理,并且从功率器件能耗的角度出发,给出了 PWM 调速的选择原则,最终排除了 HPWM-.PWM 调制方式。然后采用反电动势无位置传感器来获取
2025-07-23 13:32:51
伺服电机(英文:servomotor),在机器人、制造设备以及汽车等众多领域有着广泛应用。
2025-07-18 15:11:193836 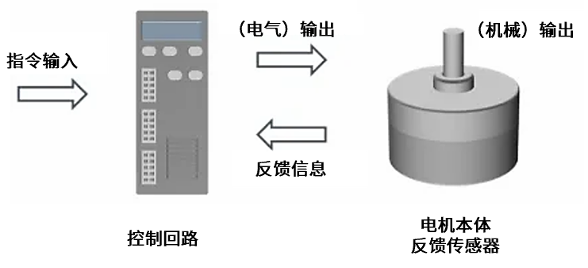
依赖机械电刷换向,后者则通过电子控制实现磁场切换。尽管二者均基于电磁作用原理,但在实际应用中需根据性能需求权衡选择。有刷直流电机工作原理有刷电机的核心在于其机械换向
2025-07-16 10:15:043223 
的转换就能够实现直线电机的控制。通过在电动机转矩调节中引入零天量,能够直接在坐标系中进行电机定子坐标系中磁链与转矩的相互转换,更不需要电机数学模型,具体的结构控制上更加的简单。但是该种控制方式也存在着
2025-07-15 15:25:34
伺服系统与变频器作为工业自动化领域的核心驱动设备,在运动控制中取得关键的作用。尽管两者均涉及电机调速,但其设计理念、技术架构和应用场景存在显著差异。以下从工作原理、性能特点、应用场景等维度展开深度
2025-07-13 16:30:021698 
摘要:对于采用脉宽调制下降沿采样,反电动势法检测无位置过零点的算法而言,低速时由于反电动势斜率低,常常会出现电机低速运行不稳定甚至导致电机停转现象,如果此时再使用软件方式控制,就会由于采样偏离理想
2025-07-10 16:35:19
摘要:为了提高永磁同步直线电机伺服系统的动态性能,提出了一种新型的自适应鲁棒控制器。该控制器不含电机参教,只与系统的状态变量有关,从而降低了对系统模型参数的依赖性。基于Lya-punov理论
2025-07-09 14:24:34
转矩脉动是影响无剧直流电机在高精度伺服系统中应用的主要原因。提出了一种基于a-p变换和Lyapunov函数的转矩脉动抑制直接功率控制方法。该方法在a-β坐标系下通过功率控制优化了电磁有功功率和电磁
2025-07-09 14:12:15
在医疗器械CT机中,实现伺服电机的精密运动控制是保障设备精准扫描的关键。将JH-CAN-TCP疆鸿智能CAN主站转Modbus TCP作为从站连接西门子PLC,并利用CAN主站连接伺服电机,这一过程中网关发挥着不可或缺的作用。
2025-07-05 11:01:21761 
摘一要:设计了一种采用 TMS320LF2407DSP作为主控制器,集成 IGBT 作为功率驱动元件的无刷直流电机控制器,对电机转速和电流的双闭环 PID 调节。通过在跑步机上的试验表明该控制器调速
2025-06-26 13:39:56
PLC与伺服控制在控制对象、控制方式、硬件结构、应用场景、系统精度与灵活性等方面存在显著区别,以下是具体分析: 控制对象 PLC:适用于逻辑控制、运动控制、流程控制等,可对生产线、机械设备等进行整体
2025-06-25 17:54:091118 摘要:分析当前主流微电机转子整流子精车设备的优缺点,针对存在问题研制了一种新型的基于PC控制的单刀双伺服精车机。阐述了单刀双伺服精车机的设计过程,技术特点。试验结果表明,本精车机加工的转子径向跳动
2025-06-24 14:09:04
稳定可靠的多功能监控终端很有必要。
本文设计了一种基于CAN总线和PC/104嵌人式计算机的多电机伺服系统监控终端。可设置各电机的工作模式和控制器参数,通过图形方式实时显示负载位置、各电机的速度和电流等
2025-06-23 07:15:19
摘要:介绍了一种数字液压阀及其控制系统,该阀采用了伺服阀的滑阀部分,驱动和反馈采用了何服电机来执行,可以进行位移闭环控制和力闭环控制,功能上完全可以替代电液伺服阀:频响可以达到200Hz(如果伺服
2025-06-19 10:59:58
新型改进的比值控制器,并对该控制器的原理及控制过程进行了相应的分析和介绍。通过 malab仿真软件对该控制系统进行了仿真实验。仿真表明,该控制器的稳态性能和瞬态性能较好,对双电机的同步控制效果优良
2025-06-18 16:33:23
纯分享帖,需要者可点击附件免费获取完整资料~~~*附件:双电伺服主传动轴电机控制软件的开发研究.pdf【免责声明】本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,删除内容!
2025-06-18 16:28:20
的电枢电压,是大齿轮的角速度,是大齿轮的转动惯量。
纯分享帖,需要者可点击附件免费获取完整资料~~~*附件:双伺服电机驱动的钻床齿隙模型仿真分析.pdf【免责声明】本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,删除内容!
2025-06-18 16:26:58
启动速度不同
步进电机启动需要200-400毫秒而伺服电机只需要几毫秒是步进电机的上百倍
控制精度不同
步进电机的精度取决于相数和驱动器的细分设置;伺服电机的精度取决于编码器的分辨率
反馈方式
2025-06-18 13:27:36
纯分享帖,需要者可点击附件免费获取完整资料~~~*附件:汽车空调冷暖伺服电机双面PCB板设计.pdf【免责声明】本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,删除内容!
2025-06-09 16:24:16
及波动系数,计算不同方式下电机铜耗,铁耗以及永磁铁涡流损耗。仿真表明:在同一速度下,两相导通方波方式下的推力小于正弦波驱动方式下的力,同时总损耗也小于正弦波驱动方式下损耗,可以在不同应用场合中选择不同驱动
2025-06-09 16:18:19
什么是伺服电机编码器?
伺服电机编码器是伺服系统中的核心反馈元件,用于实时检测电机的转速、位置、角度等参数,并将信号反馈给控制器(如伺服驱动器),形成闭环控制,确保电机运动的精准性和稳定性。
其
2025-06-09 11:07:312334 
的各个领域。
(1)工业控制自动化领域,随着现代工业的自动化,信息化,各类控制电机与特种电机被越来越广泛地应用,尤其以数字化形式为控制方式的现代混合式步进电动机,交流同服电动机、直线伺服电机等
(2)信息处理
2025-06-06 14:07:12
在异步电机直接转矩控制系统中,采用矩阵变换器供电既能实现直接转矩控制的效果,并且还具有矩阵变换器的优点。实现了将矩阵式变换器的空间矢量调制与异步电机基于定子磁场定向的直接转矩控制技术相结合。该控制
2025-06-05 11:21:43
纯分享帖,需要者可点击附件免费获取完整资料~~~*附件:机床伺服电机的选型方法分析.pdf【免责声明】本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,删除内容!
2025-05-29 14:13:56
采用粒子优化算法进行PID模糊控制训练能提高永磁同步电机的控制精度,提出一种基于改进粒子群算法的永磁同步电机 PID控制方法,构建永磁同步电机PD模糊控制目标画数,选择电压、转矩、速度和电磁损耗等
2025-05-28 15:44:44
纯分享帖,需要者可点击附件免费获取完整资料~~~*附件:电机噪声的分析与控制.pdf【免责声明】本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,删除内容!
2025-05-27 16:19:43
概述本文主要介绍BLDC电机控制的实现原理,还介绍了3类直流电机的工作方式以及控制的特点。从简单的钻机到复杂的工业机器人,许多机器设备都使用无刷直流电机将电能转换为旋转运动。掌握直流电机的控制是实现
2025-05-26 19:33:514531 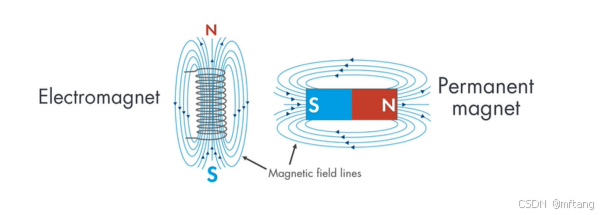
FOC控制可以实现任意角度最大扭矩输出,大大提高了电机效率。而且无刷电机采用正弦波控制可以降低纹波噪声,使电机运转更为平滑稳定,随着其性能优势和价格的降低,当前在很多场合已开始逐步推广应用。
2025-05-21 09:49:343855 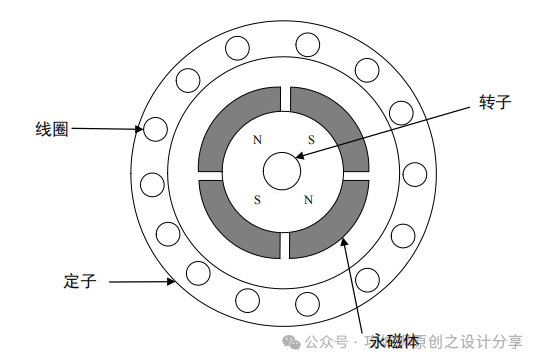
背景介绍作为精密电机,伺服电机被广泛用于工业自动化、手术机器人与CT等高精密设备上。鉴于其高可靠、高精密与紧凑要求,目前工业级的M12连接器便成为伺服电机常用的电气化连接解决方案选择。1LM12
2025-05-20 18:29:26653 
永磁交流伺服电机的编码器相位为何要与转子磁极相位对齐
其唯一目的就是要达成矢量控制的目标,使 d 轴励磁分量和 q 轴出力分量解耦,令永磁交流伺服电机定子绕组产生的电磁场始终正交于转子永磁场,从而
2025-05-14 16:00:34
伺服电机作为工业自动化领域的核心部件,其运行状态直接影响设备效率和生产线稳定性。判断伺服电机是否损坏需要结合多维度检测方法,从基础观察、性能测试到专业诊断层层递进。以下为系统性判断流程及实操要点
2025-05-12 17:21:203507 
伺服电机的测试流程是确保电机正常工作的关键步骤。以下是对伺服电机测试流程的详细分析。 一、初步检查与准备 1. 外观检查:首先,对伺服电机进行外观检查,确保电机完好无损,没有明显的物理损伤或变形
2025-04-23 17:56:301247 伺服电机过热故障是工业控制领域中常见的问题,为了有效应对这一故障,可以采取以下措施: 一、检查散热系统 ● 散热风扇与散热片:首先检查伺服电机的散热风扇和散热片是否正常工作。散热风扇负责将电机
2025-04-23 17:04:051978 三角软启动方法。此时电网提供的启动电流只有全电压启动电流的1/3,但启动力矩也只有全电压启动力矩的1/3。星三角启动,解决了电机启动瞬间对电网的冲击和对其他用电设备的影响,实现了电机控制的软启动方式
2025-04-17 22:33:54
电动机起动方式的选择
电动机分为直流电动机和交流电动机,交流电动机又分为异步电动机和同步电动机;本文论述的鼠笼型电动机为异步电动机的一种,其余电动机的起动及控制方式由于篇幅的限制本文不再论述。
鼠笼
2025-04-14 21:30:47
西门子伺服电机简明样本
2025-04-14 15:36:19 2
2 安川伺服电机的灵活适配性,使其在汽车制造、电子装配、物流分拣等领域大放异彩。作为工业自动化领域的重要组成部分,安川伺服电机将继续发挥其高精度、强劲动力和高速转动的特点,为各个行业的发展提供更加高效、智能的解决方案。
2025-04-10 13:38:281893 
型号的选择和通过等效电路分析电机性能。控制方面包括调速方式的选择(调压调速和变频调速等),控制器所需的硬件、工作状态(电动机运行,发电机运行,电磁制动)、静态和动态(尤其是启动)的性能,以及一些附加问题如
2025-04-07 18:19:23
包括FOC矢量控制、六步换向控制、高级转子位置检测、转矩控制方法,适用于工业设备和家电 2025 年 4 月 2 日,中国 ——意法半导体的 EVLSERVO1伺服电机驱动器参考设计是一个尺寸
2025-04-02 15:24:091591 伺服电机的一些资料,纯分享帖,需要者可点击附件获取完整资料~~~
(免责声明:本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,删除内容!)
2025-04-01 14:36:03
伺服电机驱动器:运动控制系统的“心脏”伺服驱动器作为运动控制系统的驱动层和“心脏”,一般通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位。
2025-03-27 17:45:581581 
这篇文章主要介绍了使用EtherCAN转CANopen网关控制伺服电机的步骤,包括配置软件、创建新工程、搜索设备、添加主站设备、导入EDS文件、添加从站设备、设置参数、生成和下载。文章最后介绍了在线监控和I/O功能映射的功能。
2025-03-23 17:30:30670 
要将三菱伺服电机设置为无编码器模式(也称为开环控制模式),需要遵循一定的步骤和注意事项。以下是一个详细的指南: 一、了解无编码器模式 无编码器模式是指伺服电机在没有编码器反馈信号的情况下,根据输入
2025-03-20 07:41:441327 机设计,EZ 系列同步伺服电机在一个非常紧凑的的 形式下提供一个非常高的功率密度。同样的由海德汉 公司新开发EBI1135缓冲电池式多圈绝对值旋转编 码器适用于该伺服电机的定位和速度控制。
全文
2025-03-12 16:58:47
工作环境、精度要求、分辨率需求、输出信号类型等。这有助于缩小选型范围,提高选型的准确性和效率。 二、选择合适的编码器类型 根据应用需求,选择合适的编码器类型。常见的伺服电机编码器类型包括光电编码器、磁性编码器和共
2025-03-11 12:01:041696 
伺服电机作为机器人运动控制的核心部件,其高精度、高响应速度和高负载能力等特点,为机器人的精确运动提供了有力保障。在工业机器人、医疗机器人、服务机器人等领域,伺服电机都有着广泛的应用。然而,随着机器人
2025-03-07 16:38:541672 
永磁交流伺服电机的编码器相位为何要与转子磁极相位对齐,其唯一目的就是要达成矢量控制的目标,使 d 轴励磁分量和 q 轴出力分量解耦,令永磁交流伺服电机定子绕组产生的电磁场始终正交于转子永磁场,从而
2025-03-03 01:58:19
在选择一款合适的直流伺服电机和减速机时,我们需要综合考虑多个因素,以确保所选设备能够满足特定的应用需求,同时实现高效、稳定和可靠的运行。以下将从电机类型、性能参数、减速机选型、应用环境以及成本效益
2025-02-27 12:04:241274 
伺服驱动器的主要作用是控制伺服电机,实现高精度的传动系统定位 。 伺服驱动器,又称为“伺服控制器”或“伺服放大器”,是现代运动控制的重要组成部分。它通过接收外部控制信号,对伺服电机进行精确的速度
2025-02-20 10:06:132912
工业机器人数控机床XY机械手双轴机器人堆垛机专用双轴伺服电机驱动控制器48V 14ARMS带有STO功能,隔离高压CAN/RS485/USB通讯支持编码器和霍尔输入- TMCM-2611
双伺服
2025-02-15 12:14:19
电气控制、机械调整和软件编程三个方面。 一、电气控制 伺服电机的电气控制是改变电机方向的主要方法之一。伺服电机通常采用三相交流电供电,通过改变供电相序,可以实现电机的正反转。具体步骤如下: 1.1 断开电源:在进行电气控
2025-02-12 11:07:522630 【电磁兼容技术案例分享】伺服控制器产品电机抖动EMC自兼容问题案例
2025-02-11 09:40:25907 
舵机和伺服电机在自动化和机器人技术领域中都是常用的执行器,它们都能够实现精确的位置控制,但二者之间存在一些基本的区别,具体如下: 一、定义与构成 1. 舵机
2025-02-07 07:37:411933 
绝对式编码器在伺服电机控制中的应用广泛且重要,其优势显著,以下是对其应用与优势的详细分析: 一、绝对式编码器在伺服电机控制中的应用 绝对式编码器是一种常用的位置
2025-02-06 09:46:151722 
我使用AM26LS31芯片,将3.3V脉冲转换为双路脉冲,用于驱动伺服电机,伺服电机接收的脉冲数大于控制器实际发送的脉冲。我将AM26LS31的输入脚直接接GND和3.3V时,伺服电机也会接收到脉冲,请问工程师,这个问题用什么方法可以解决?
2025-01-23 07:32:39
电机控制器是现代工业自动化和机器人技术中不可或缺的一部分。它们负责精确控制电机的速度、位置和力矩,以实现高效和精确的运动控制。 1. 硬件选择 在开始编程之前,首先需要选择合适的电机和驱动器。常见
2025-01-22 09:37:161461 在自动化控制系统中,电机控制器和伺服系统是实现精确运动控制的关键组件。电机控制器负责接收控制信号并驱动电机,而伺服系统则确保电机按照预定的轨迹和速度精确运动。 电机控制器的基本概念 电机控制器是一种
2025-01-22 09:35:461590 在选择搬运机械手的电机时,需要考虑多个因素以确保电机的性能满足机械手的运行需求。以下是一个详细的案例分析,说明如何为搬运机械手选择合适的电机。 一、电机类型选择
2025-01-21 16:44:451590 
伺服电机编码器故障及维修,伺服电机编码器4大常见故障,编码器信号丢失或不稳定,编码器零点偏移,编码器过热,编码器机械损坏;伺服电机编码器4大维修方法:在维修伺服电机编码器时,需要维修人员具备一定
2025-01-21 14:49:354296 
在现代工业自动化和控制系统中,伺服电机编码器扮演着至关重要的角色。它能够精确测量电机的位置、速度和方向,为系统提供准确的反馈信息,实现高精度的运动控制。伺服电机编码器作为伺服系统中的关键部件,其性能和可靠性直接影响着整个系统的运行效果。
2025-01-20 14:01:181821 在电机的运行中,是由电机定子和转子磁场同步旋转,建立的一个具有同步旋转速度的旋转坐标系,这个旋转坐标系就是常说的D-Q旋转坐标系。在该旋转坐标系上,所有电信号都可以描述为常数。为了方便电机矢量控制
2025-01-15 17:23:301416 
高压伺服控制器是一种高精度电子装置,用来控制高压伺服电机的位置、速度和力矩,可确保工业机器人、数控机床、喷绘写真、激光切割以及自动化生产线等设备实现高精度运动定位控制。其通过提供高效性能、快速响应、优化能量转换效率,保障伺服系统稳定可靠运行,有助于推动智能制造和工业4.0的转型与升级。
2025-01-13 18:06:351781 
伺服电机静电防护完整方案 伺服电机是一种能够将电能转换为机械能的装置,通过接收控制信号来实现对电机转速、转向和位置的控制。它具有高精度、高速度和高效率的特点,能够将电压信号转化为转矩和转速,以驱动
2025-01-09 14:28:371192 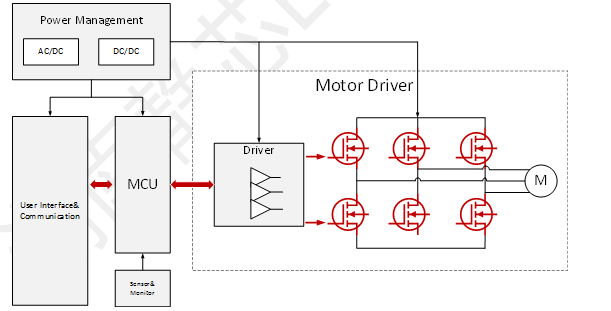
在自动化和机器人技术领域,精确控制机械运动是至关重要的。舵机和伺服电机是两种常用的执行器,它们都能够实现精确的位置控制。尽管它们在某些应用中可以互换使用,但它们之间存在一些基本的区别,这些区别影响了
2025-01-08 17:39:212430 伺服电机滑环是一种用于电机与转动部分之间传递电信号和电力的装置。它主要用于需要360度连续旋转的系统中,能够有效解决传统电缆在旋转过程中扭结、磨损的问题。
2025-01-06 09:36:181210 
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论