 基于点到极线度量的用于道路车辆的双目视觉里程计
基于点到极线度量的用于道路车辆的双目视觉里程计

摘要
精准定位是所有自动驾驶系统的基础组成模块。本文,我们专注于双目相机,提出一种名叫SOFT2的新方法,这是当前KITTI评分板上排名第一的算法。SOFT2依赖于对极几何和运动学的约束,也就是说,它是为不会出现纯旋转的装置而开发的。我们最小化了点到极线的距离,这使得该方法能够适应对象深度的不确定性,作为第一步,我们仅使用一个摄像头按比例估计运动。
然后,我们提出联合估计绝对尺度和第二个相机的外部旋转矩阵,以减轻变化的双目设备的外参的影响。最后, 我们通过提出的极线BA处理,平滑帧时间窗口中的运动估计 。
我们还引入了一个多假设特征匹配方法,用于因视角变化出现的外观变化而出现的自相似平面。我们评估SOFT2,并将其与ORB-SLAM2、OV2SLAM和VINS-FUSION在KITTI-360数据集上、KITTI训练序列、Málaga Urban数据集、Oxford Robotics Car数据集、和多车立体事件摄像机数据集进行比较。 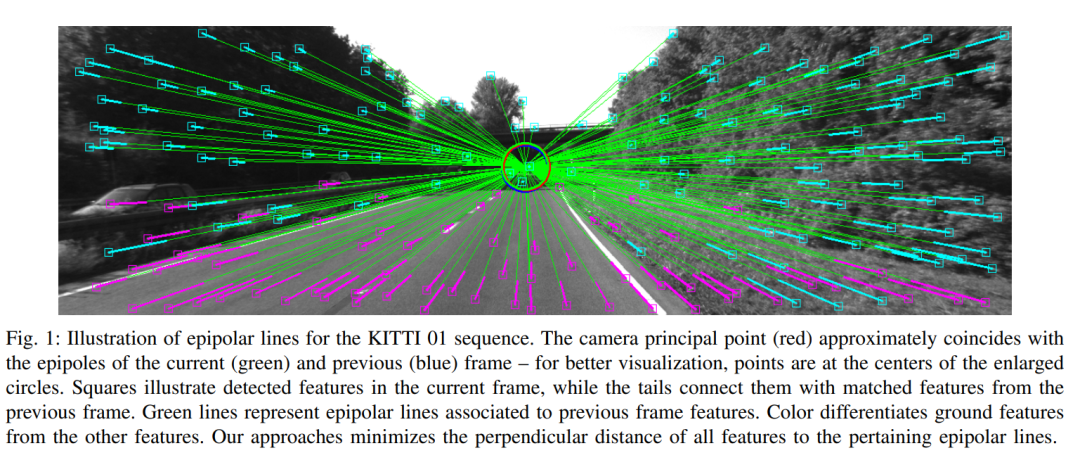
图1. KITTI 01序列的极线图解。相机光心点(红色)大致与当前(绿色)和之前(蓝色)帧的极点重合-为了更好地可视化,点位于放大的中心圆中。正方形显示当前帧中检测到的特征,而尾线将它们与来自上一帧的匹配点连接起来。绿线表示与前一帧特征关联的极线。颜色将地面特征和其它特征进行了区分。我们的方法最小化了所有特征与相关极线的垂直距离。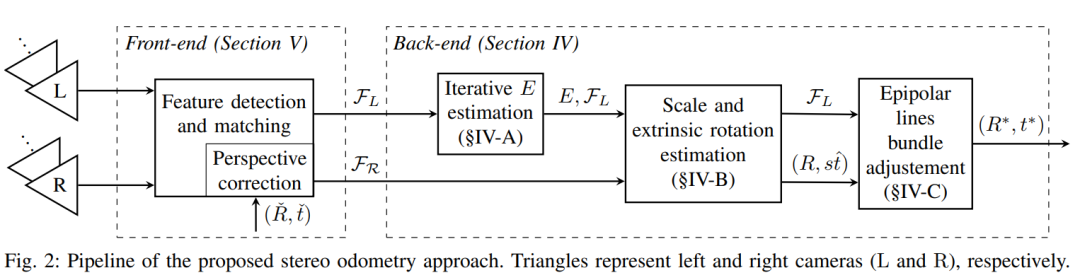
图2.所提双目里程计方法的整体流程。三角形分别代表左右相机。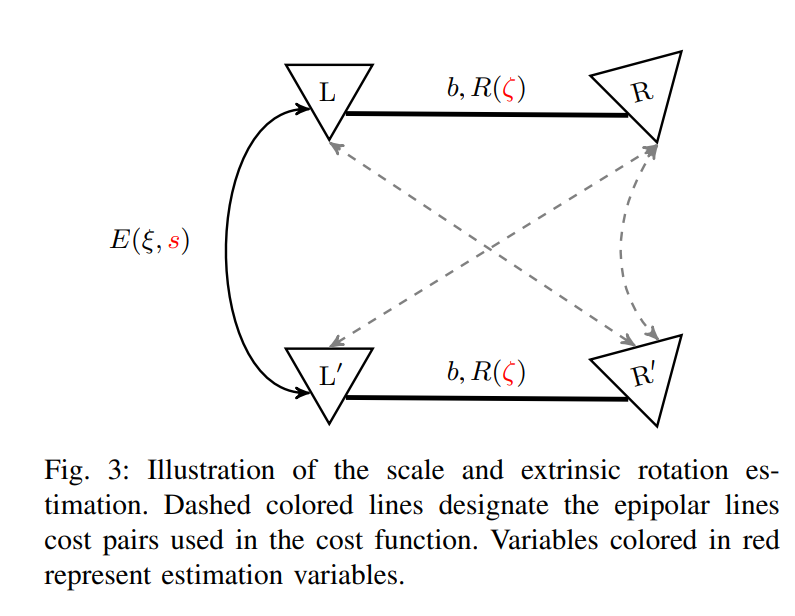
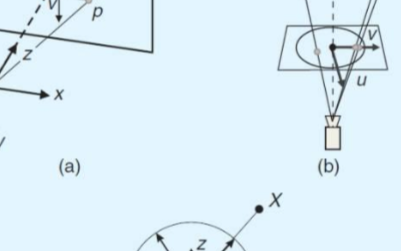
图3. 尺度和外参旋转估计的阐述。彩色虚线表示代价函数中使用的极线代价对。红色变量表示估计变量。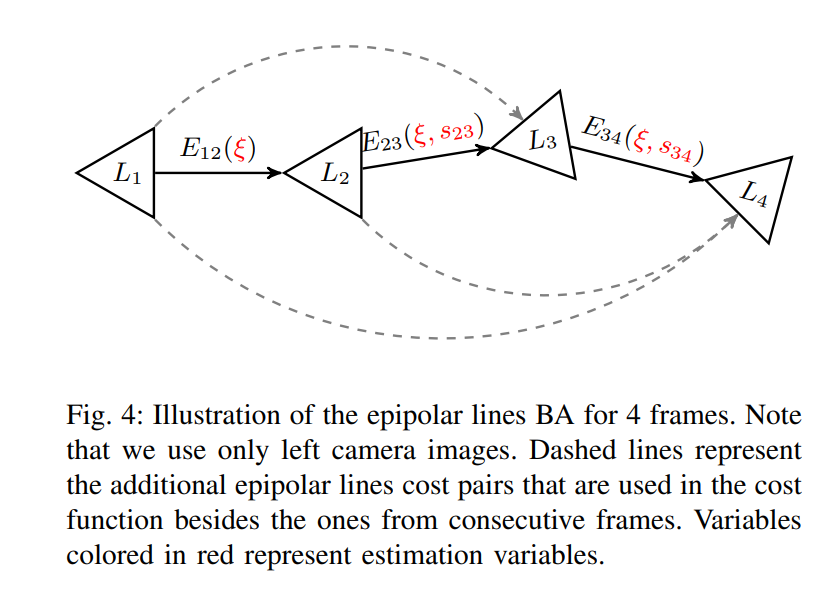
图4.4帧极线BA的说明。注意,我们只使用左相机的图像。虚线表示代价函数中使用的额外极线代价对,除了来自连续帧的函数外。红色变量表示估计变量。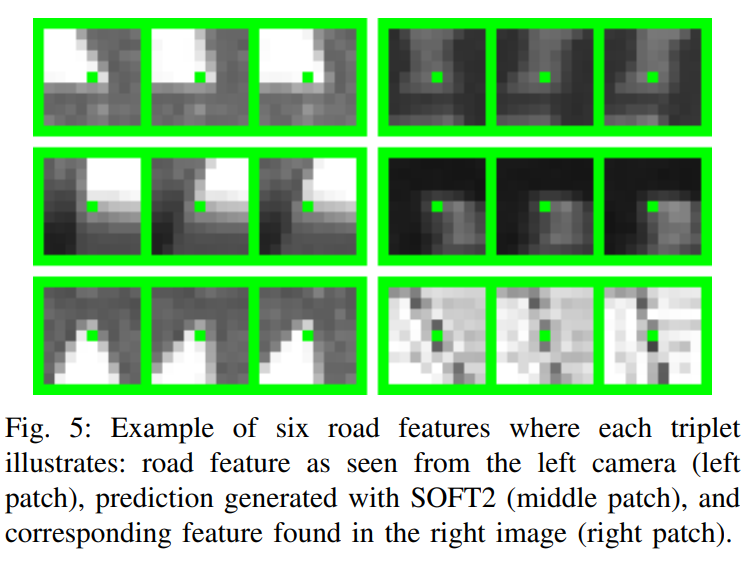
图5.六条道路特征的示例,其中每三条分别表示:从左侧摄像头(左侧)看到的道路特征(左边块),使用SOFT2(中间块)生成的预测,以及在右侧图像中找到的相应的特征(右侧块)。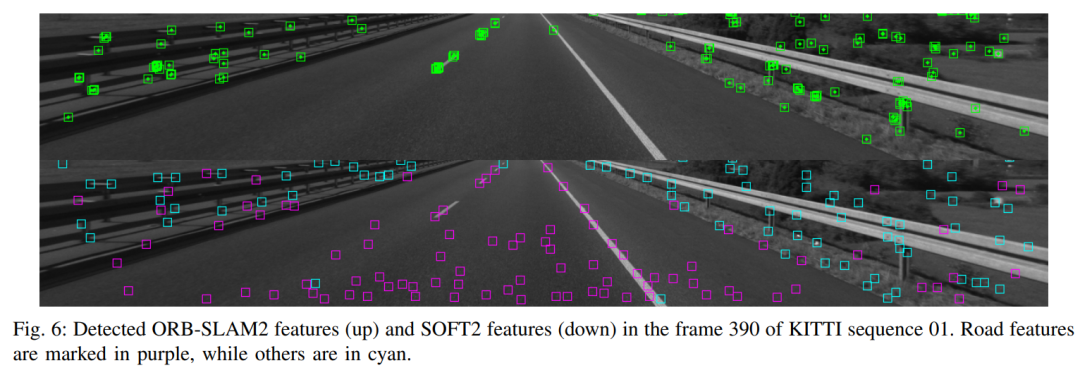
图6.在KITTI01序列的第390帧检测到的ORB-SLAM2特征(上)和SOFT2特征(下)。道路特征被标记为紫色,其它被标记为青色。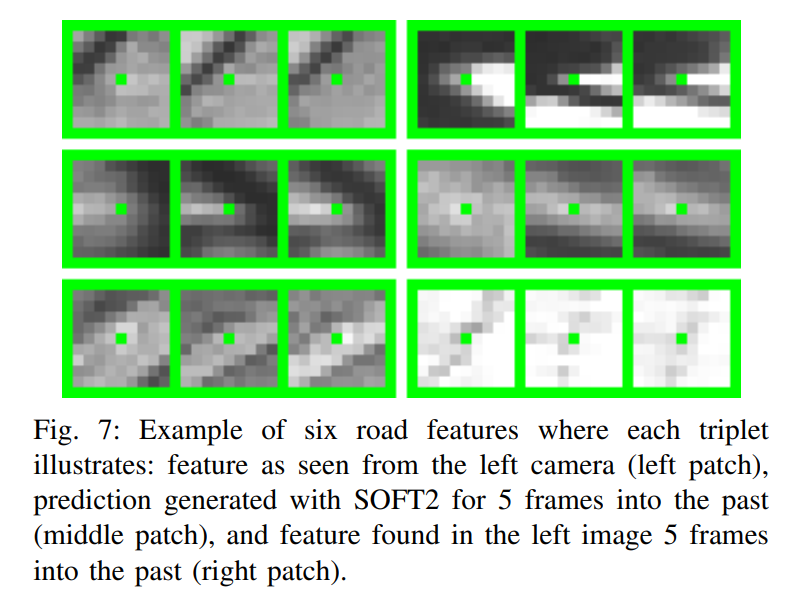
图7.六条道路特征的示例,其中每三条分别表示:从左侧相机(左侧块)看到的特征,使用SOFT2生成过去5帧的预测(中间块),以及在过去5帧左侧图像找到的特征(右侧块)。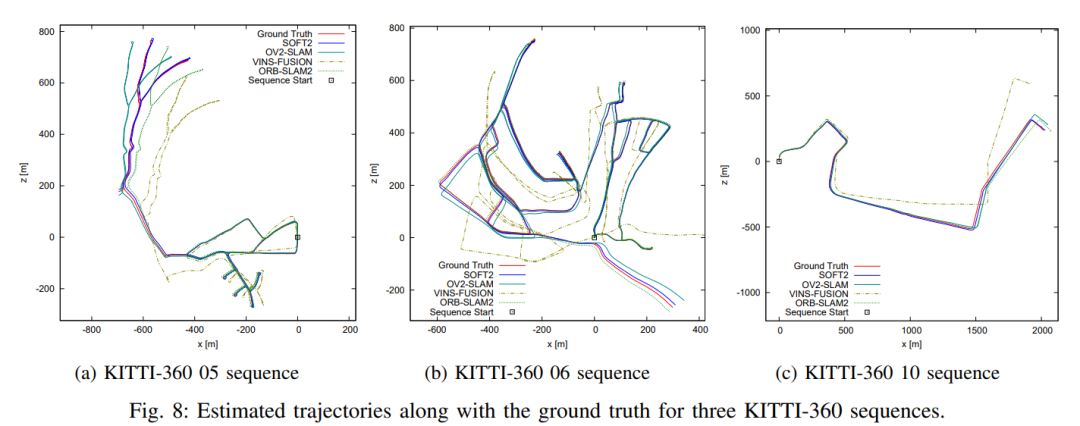
图8.三个KITTI-360序列的估计轨迹和真值。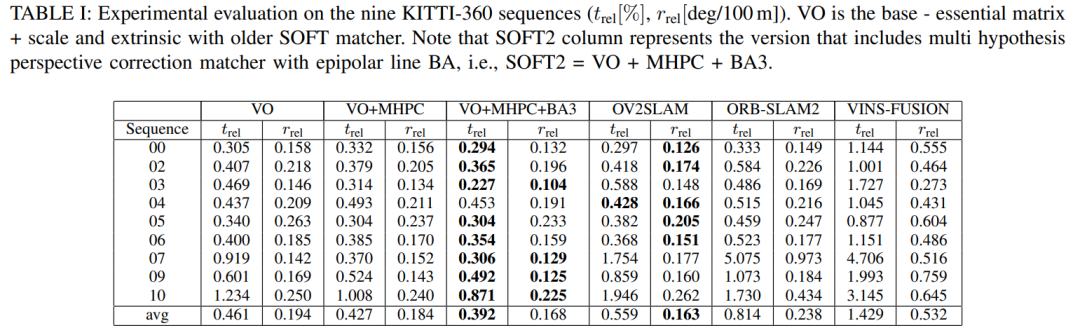
表1.九个KITTI-360序列的实验评估(trel[%],rrelr[deg/100 m])。VO是基础—本征矩阵+利用旧版本SOFT匹配器得到的尺度和外参。注意,SOFT2列表示包含带极线BA的多假设透视校正匹配器的版本,即SOFT2=VO+MHPC+BA3。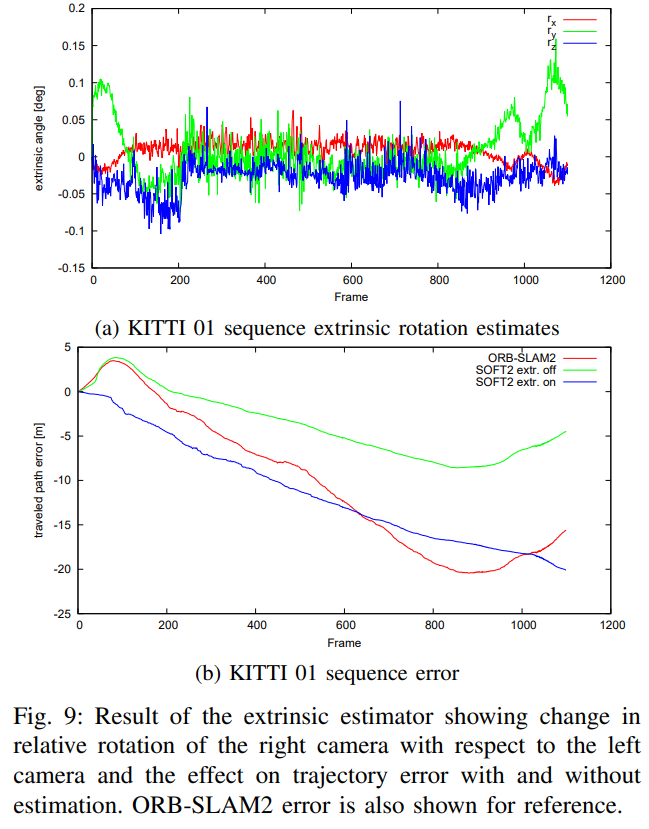
图9.外参估计结果显示右侧相机相对于左侧相机的相对旋转,和有估计以及没有估计的轨迹误差影响。ORB-SLAM2的误差也展示出来,以供参考。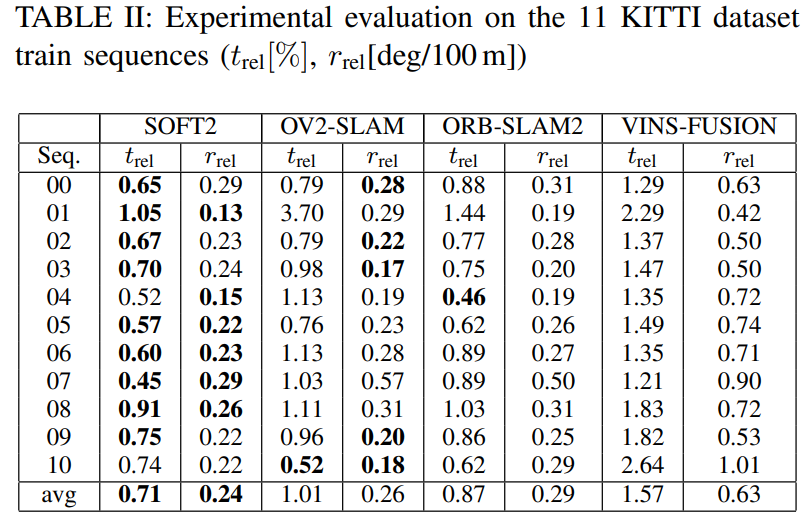
表2.在11个KITTI数据集训练序列的实验评估。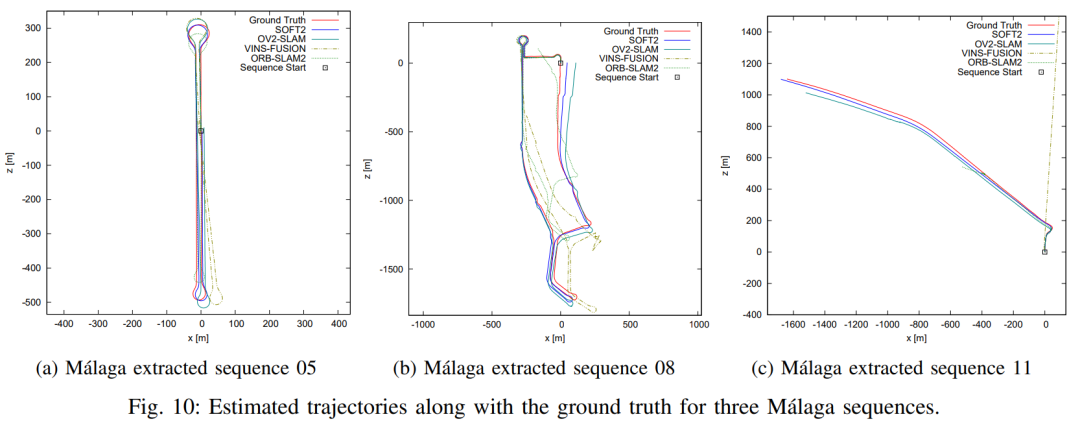
图10.三个Málaga序列的估计轨迹和真值。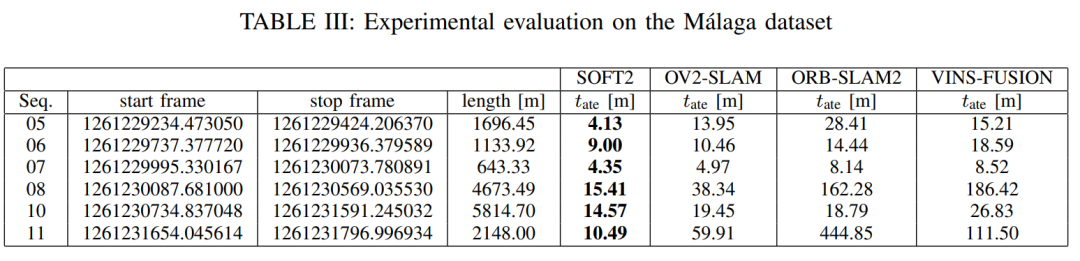
表3.Málaga数据集的实验评估。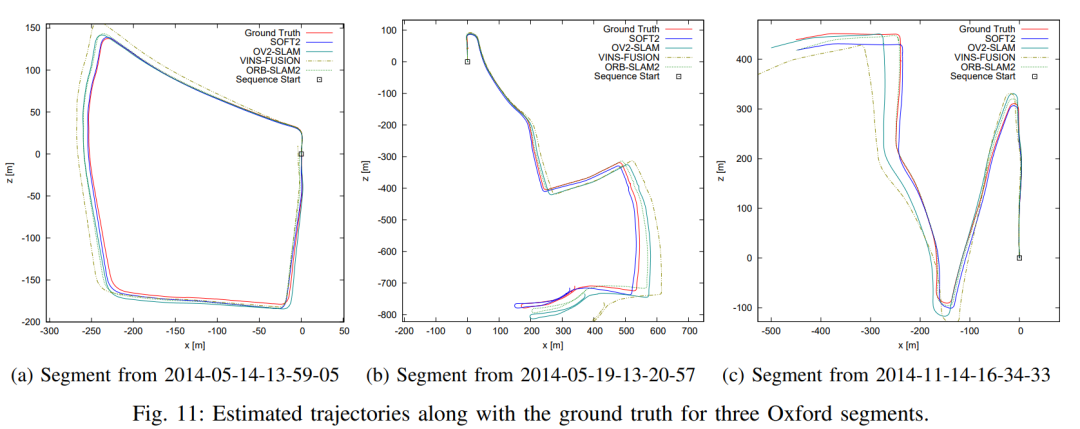
图11.三个Oxford片段的估计轨迹和真值。
表4.Oxford数据集的实验评估。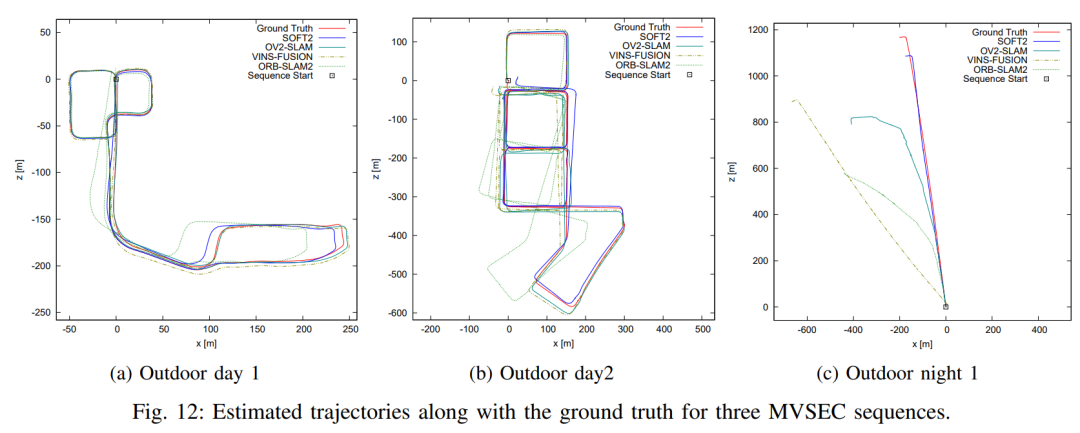
图12.MVSEC序列的估计轨迹和真值。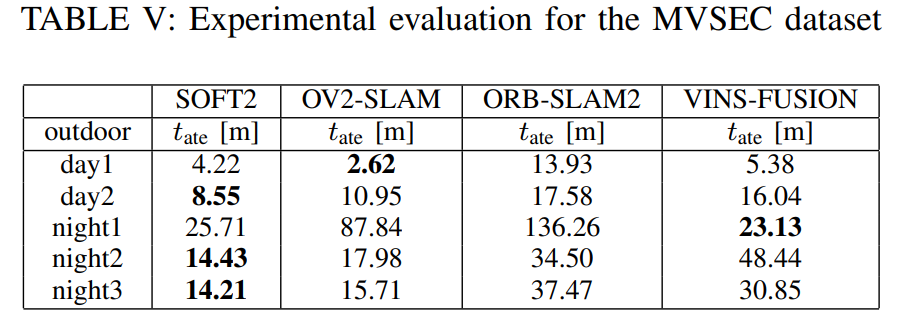
表5.MVSEC数据集的实验评估。
审核编辑:刘清
-
MHP
+关注
关注
0文章
7浏览量
9128 -
SLAM
+关注
关注
24文章
461浏览量
33463 -
自动驾驶系统
+关注
关注
0文章
70浏览量
7346 -
orb
+关注
关注
0文章
21浏览量
10220
原文标题:SOFT2:基于点到极线度量的用于道路车辆的双目视觉里程计
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
基于SoC的双目视觉ADAS解决方案
基于SoC的双目视觉ADAS解决方案
LabVIEW双目视觉 【转载】
如何理解SLAM用到的传感器轮式里程计IMU、雷达、相机的工作原理与使用场景?精选资料分享
双目视觉立体匹配算法研究
一种基于图像处理的双目视觉校准方法
视觉里程计的详细介绍和算法过程
视觉语义里程计的详细资料说明
计算机视觉方向简介之视觉惯性里程计

基于单个全景相机的视觉里程计

在城市地区使用低等级IMU的单目视觉惯性车轮里程计

双目立体视觉是什么?单目视觉与双目立体视觉的区别?

用于任意排列多相机的通用视觉里程计系统




评论