在医疗设备、机器人关节或自动化装置中,驱动电路的尺寸和可靠性同样关键。SiLM2026EN-DG半桥门极驱动器,在仅3mm x 3mm的极小封装内,提供了200V的耐压和高效的驱动能力。它旨在
2025-12-27 09:27:00
桥应用。除此之外,像一些小型步进电机、精密医疗器械(如注射泵)、工业自动化设备(如贴片机、机械臂)的驱动部分,应该都能用得上。总之,需要高压、高速、可靠驱动,同时又对体积有要求的场景,它算是个不错的选择。
#半桥驱动 #SiLM2026 #机器人关节电机
2025-12-13 08:41:39
交流伺服电机作为现代工业自动化领域的核心驱动元件,凭借其高精度、快速响应和稳定运行的特点,已成为数控机床、机器人、精密仪器等高端装备的关键部件。其技术发展与应用实践呈现出鲜明的时代特征,本文将从
2025-12-13 07:37:34 200
200 
本文将从技术角度出发,对三相无刷电机的电机驱动器的作用、种类和规格进行介绍。通过本文,您可以学习到电机驱动器选型所需的基础知识。
2025-12-10 14:13:016070 
装四大特点,直击高压半桥驱动设计中的痛点。无论是追求功率密度的高频电源,还是空间受限的机器人关节,亦或是高可靠要求的医疗设备,SiLM2026EN-DG都能提供高效、稳定、易用的驱动解决方案。#SiLM2026 #半桥门极驱动 #机器人关节电机
2025-12-09 08:35:20
电子发烧友网报道(文/梁浩斌)大家现在最熟悉的人形机器人,比如宇树G1,可以很明显地看出驱动其关节运动的电机是直接安装在关节上,关节是通过电机和减速器直接驱动。但最近被“打假”的挪威人形机器人公司
2025-12-03 08:27:009650 
关节电机驱动:其紧凑尺寸、高开关频率和强大驱动能力,非常适合多关节机器人中对空间和动态响应要求极高的伺服驱动器。
医疗器械(如注射泵、分析仪器):高可靠性和稳定性是医疗设备的生命线,该驱动器的内置保护
2025-12-02 08:22:11
于高速大力矩工作状态;
相同功率下,体积和重量较小,广泛的应用于机床、机械设备、搬运机构、印刷设备、装配机器人、加工机械、高速卷绕机、纺织机械等场合,满足了传动领域的发展需求。
1.交流永磁同步伺服驱动器
2025-11-27 08:04:21
人形机器人的智能化升级对驱动电机的性能提出了前所未有的严苛要求。艾诺仪器凭借电机测试平台AN8A10系列,深度融合高精度传感、多通道协同及智能算法技术,为无框力矩电机及空心杯电机客群,提供了从研发到量产的全程测试保障测试方案。
2025-11-21 14:02:24772 
人形机器人关节模组一般是集传动装置、驱动器、电机、抱闸、编码器以及力矩传感器等于一体的精密部件,负责驱动和控制人形机器人各个关节精确实现拟人化动作的核心执行单元,其性能直接决定了机器人的运动能力、效率与可靠性。
2025-11-19 09:24:421424 
一、背景:机器人迈向“微米级控制时代”
随着智能制造和自动化产业的持续升级,工业机器人不再仅仅承担重复搬运,而是被要求在装配、检测、精密加工等高精度场景中完成微米级控制任务。
在这些“高精度机器人
2025-11-14 15:48:29
、视觉系统及人机界面,构成工厂级控制主干。而产线上部署的六台焊接机器人,其内部构成复杂:每个机器人的六个关节伺服驱动器、末端执行器以及手爪IO模块,均作为CANopen从站,挂接在机器人控制器内部的CANopen总线上。 项目核心痛点: 1.数据深度获取困难:主站P
2025-11-11 14:57:57921 
科义轨道式巡检机器人:高精度智能巡检解决方案精准定位系统:毫米级路径控制技术科义轨道式巡检机器人搭载激光导航系统,实现±5毫米级定位精度,支持多机协同作业,形成无死角巡检网络。
2025-11-06 09:44:02
灵活的完成这些指令的呢? 首先,我们需要了解工业机器人的三大核心部件:控制器、伺服电机、减速器。 1控制器是工业机器人的大脑,负责发布和传递动作指令 2.伺服电机是工业机器人的动力系统,是工业机器人运动的心脏。 3.减
2025-10-30 14:18:58252 瑞芯微RK3576 AIoT处理器处理器凭借其卓越的多屏异显与8路摄像头接入能力,为机器人领域带来革新。米尔电子MYD-LR3576开发板实测数据显示,在高负载下CPU占用仅34%,完美实现多路视觉
2025-10-29 16:41:20
IO站、视觉系统及人机界面,构成工厂级控制主干。而产线上部署的六台焊接机器人,其内部构成复杂:每个机器人的六个关节伺服驱动器、末端执行器以及手爪IO模块,均作为 CANopen从站 ,挂接在机器人控制器内部的CANopen总线上。 项目核心痛点: 1.数据深度获取困难:主站
2025-10-29 16:16:31764 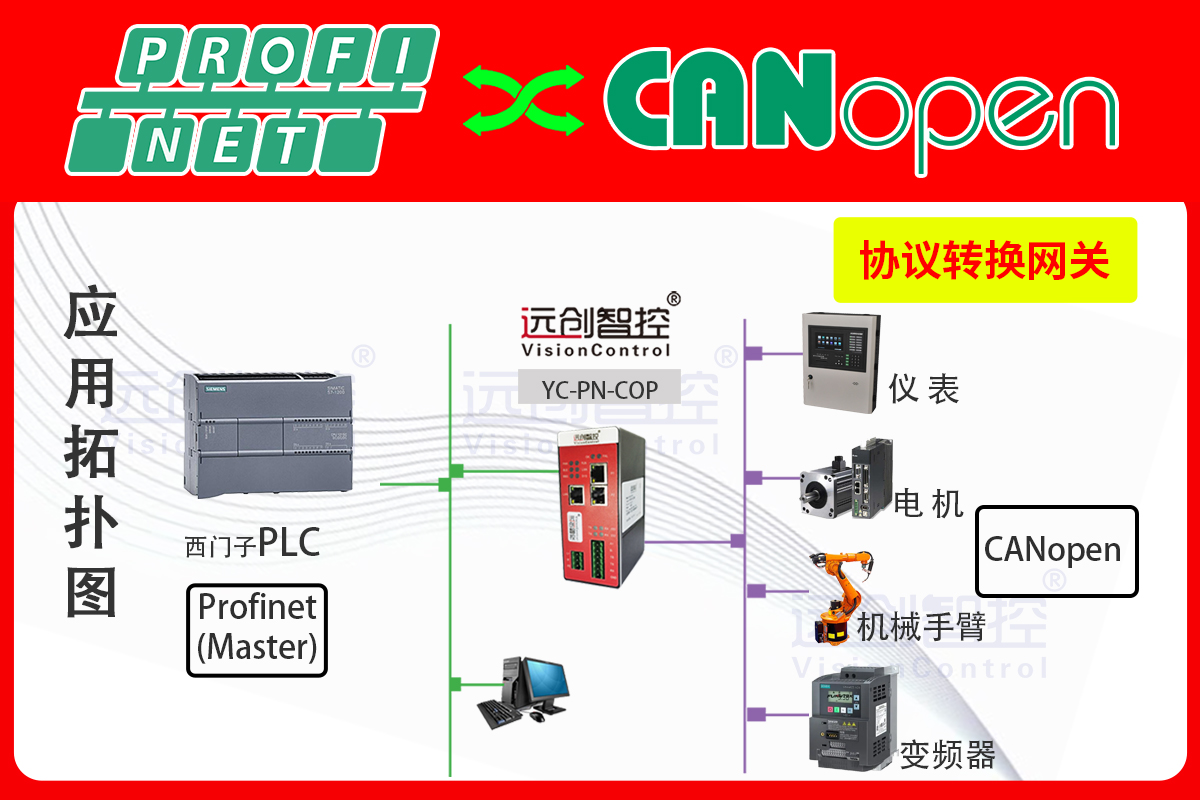
在自动化设备、智能机器人、精密仪器等领域,步进电机的稳定驱动是保障设备精度与可靠性的核心环节,而HR4988作为一款内部集成译码器的微特步进电机驱动器,凭借其便捷的操作特性与出色的性能表现,成为众多
2025-10-28 16:37:32573 
代替,
LED,
有大佬感兴趣,
一起关注和讨论代码,
这个机器人知名度不高,
可是是机器人的原型,
如果开放接口,
定位和无线充电,
也不失为未来的礼物。
让我们为小萝卜工程师的,
自掏腰包救萝卜
2025-10-23 05:24:26
基于GD32VF103处理器所自主设计的RV-STAR开发板,它主要负责处理红外反射传感器采所集到的模拟数据,并将处理后的数据后向下发送给电机驱动模块来精确控制两个直流电机的转向和转速。由于该机器人
2025-10-20 10:39:51
DRV8872设备是用于打印机、电器、工业设备和其他小型机器的有刷直流电机驱动器。两个逻辑输入控制 H 桥驱动器,该驱动器由四个 N 沟道 MOSFET 组成,可以双向控制电机,峰值电流高达
2025-10-17 10:11:20457 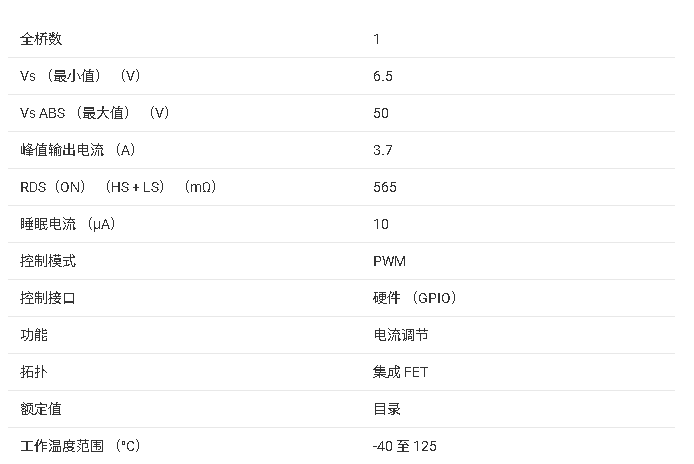
DRV8870 器件是用于打印机、电器、工业设备和其他小型机器的有刷直流电机驱动器。两个逻辑输入控制 H 桥驱动器,该驱动器由四个 N 沟道 MOSFET 组成,可以双向控制电机,峰值电流高达
2025-10-17 10:06:15627 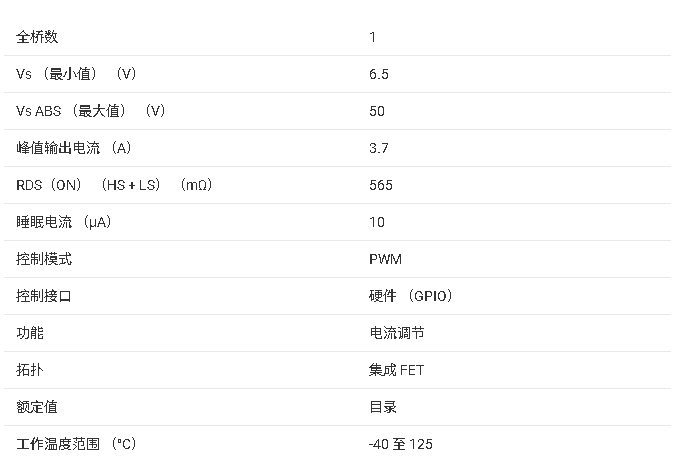
Arduino Uno l两轮自平衡机器人 电机驱动无输出求解
2025-10-15 06:36:24
作者:Jeff Shepard 投稿人:DigiKey 北美编辑 为工业机器人选择变频驱动器 (VFD) 电缆时,必须考虑几个关键因素才能确保获得最小的解决方案规格和最高的可靠性。没有万能的解决方案
2025-10-04 18:37:001611 
与高功率密度:封装尺寸最小达6.8×3.0mm,第三代GaN(氮化镓)系列模块功率密度提升至120W/in³,较传统方案缩小40%体积。适用于空间受限的电机控制系统,如工业机器人关节驱动器,降低系统
2025-09-26 09:07:54
圣邦微电子推出 SGM42618,一款支持 1/32 细分的步进电机驱动器。该器件可应用于机器人、纺织设备、扫描仪、定位与跟踪设备及打印机等。
2025-09-17 09:15:541650 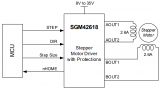
在工业自动化、机器人技术迅猛发展的今天,高效、紧凑、可靠的电机驱动方案成为提升设备性能的关键。SiLM2026EN-DG高压半桥栅极驱动器,200V耐压、强劲驱动电流(290mA/600mA) 以及
2025-09-04 08:22:55
随着工业自动化需求的提升,工业机器人已经广泛应用于各个生产环节,成为提升自动化水平和生产效率的重要工具。伺服电机作为工业机器人的核心部件,通过控制器对编码器反馈的位置信号进行反馈调节,从而精确
2025-09-01 10:01:02340 
精度和智能化发展,要求电容器等元器件具备卓越的稳定性、抗干扰性和长寿命,确保系统高效可靠运行。YMIN01工业机器人伺服电机驱动器工业机器人伺服电机驱动器需要应对高负
2025-09-01 09:59:57712 PART1人形机器人心脏:伺服电机驱动器随着人工智能和机器人技术的飞速发展,人形机器人正逐步成为智能制造和未来生活的新伙伴。在这一领域,伺服电机作为人形机器人的“心脏”,其性能直接决定了机器人的运动
2025-08-30 10:57:24533 任务执行。在这些功能实现中,电容器作为关键元件,稳定电源供应、确保电流平稳流动,并为人形机器人的伺服电机驱动器、控制器、电源模块提供支持。人形机器人-伺服电机驱动器
2025-08-30 10:56:281573 起着决定性作用。今天,我们就来聊聊集成多摩川磁性编码器的伺服电机与机器人关节的设计创新,这可是机器人领域里的一项大突破!
2025-08-28 18:23:51608 随着人形机器人加速商业化,电机作为驱动关节运动的关键部件,在人形机器人上使用的电机种类根据其设计目标和功能需求而有所不同,主要包括伺服电机、无刷直流电机、步进电机和其他特种电机。这些电机通常根据
2025-08-28 08:33:331211 
2025 世界人形机器人运动会于 8 月 17 日圆满收官,赛场上机器人在跑步、跳跃、抓取等项目中的精彩表现,背后是运动控制、环境感知等技术的迭代升级。而在这些技术中,磁传感器芯片凭借独特优势,成为
2025-08-26 10:02:02
随着工业自动化程度的不断提高,工业机器人已经成为现代制造业不可或缺的重要设备。作为工业机器人的核心部件,伺服驱动器对供电质量有着极高的要求。那么,如何为工业机器人伺服驱动器选择合适的UPS不间断电源
2025-08-20 10:09:00534 
医院HDU高依赖康复病房病人/养老场景易发病老人江智病症监护机器人JZR15605201应用场景:专对医院HDU高依赖康复病房病人病症监护专对养老场景易发病老人病症监护2 机器人
2025-08-18 16:19:17
产品简介经世智能3C电子行业物料转运复合机器人,复合机器人在3C电子行业聚焦物料转运与仓储管理、精密设备上下料、装配站机台上下料等应用场景。机器人机械臂末端可定制末端夹具,车身可定制物料缓存架
2025-08-13 13:53:28
产品简介经世智能档案存取复合机器人,在智慧档案库房行业主要应用于档案自动存取与转运、涉密档案管理等环节,通过“AGV移动底盘+协作机械臂+视觉系统”一体化控制方案实现高效自动化作业。机器人机械臂末端
2025-08-13 13:36:24
产品简介经世智能半导体行业晶圆盒转运复合机器人,复合机器人在半导体行业主要应用于晶圆盒转运、机台上下料等环节,通过“AGV移动底盘+协作机械臂+视觉系统"一体化控制方案实现高效自动化作业。机器人
2025-08-13 13:28:39
产品简介经世智能实验室物料转运复合机器人,复合机器人在智慧实验室行业主要应用于实验样本自动化转运、高通量实验流程衔接、危险物料与废弃物处理等环节,通过“AGV移动底盘+协作机械臂+视觉系统”一体化
2025-08-13 10:06:22
产品简介经世智能CNC上下料复合机器人,复合机器人集成AGV+机械臂+视觉系统,提供CNC多工序柔性上下料、CNC全自动刀具更换自动化解决方案,打通生产物流最后“一公里"。机器人机械臂末端可定制末端
2025-08-13 09:47:30
驱动器还具有开关频率高达100kHz 的PWM控制接口。RTE包支持无传感器电机失速检测并向微控制器报告。DRV8213驱动器非常适合有刷直流电机、螺线管、继电器驱动、水表和煤气表、电子智能锁、电子和机器人玩具、便携式打印机等。
2025-08-11 14:45:14850 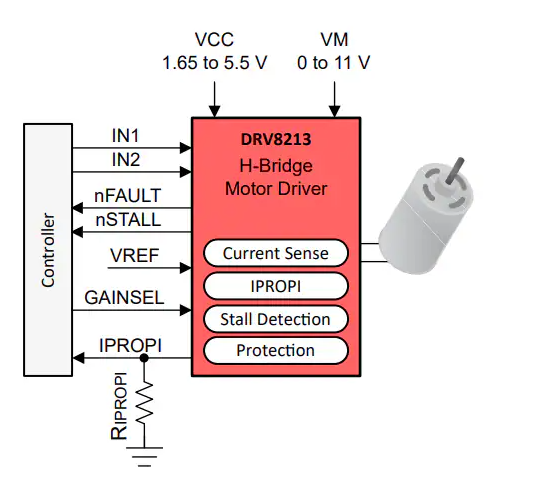
和5.0A 的峰值输出电流。有带关断的过温保护和过电流保护(IOCP=5.0A)。应用领域:机器人(伺服、清扫机器人)玩具(遥控车、遥控飞机)直流电机的相关应用
2025-08-04 18:04:43
在当今科技飞速发展的时代,机器人已经广泛应用于工业制造、物流配送、医疗服务等众多领域。而机器人关节伺服控制作为机器人运动的关键技术,其性能的优劣直接影响着机器人的工作效率和精度。今天,我们就来聊聊MT6701绝对式磁编码器是如何优化机器人关节伺服控制的。
2025-08-04 17:57:12808 永磁电机调速驱动器、伺服驱动器与变频器作为现代工业控制领域的三大核心动力装置,在电机控制领域各具特色且存在交叉应用。但在应用过程中,它们之间存在一些异同点。以下是对这三者的详细比较: 一、永磁电机
2025-07-30 07:35:411073 
随着机器人系统在工业环境中的应用越来越广泛,行业安全要求以及国家/地区和国际安全法规需要不断更新,确保人类在靠近机器的位置工作时拥有安全的环境。功能安全评估可以证明器件满足安全要求,确保产品能够负责任地被推向市场。
2025-07-29 15:11:232804 
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
2025-07-26 11:22:07
伺服电机(英文:servomotor),在机器人、制造设备以及汽车等众多领域有着广泛应用。
2025-07-18 15:11:193836 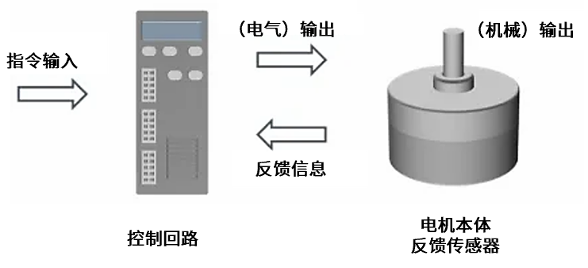
摘 要:根据小型排爆机器人在精确移动及可靠跨越障碍方面对电机驱动的特殊要求,提出一种基于BTS7970驱动芯片的直流电机驱动系统的设计方案,详细介绍了系统的硬件电路和基于PWM控制转速的软件实现方法
2025-07-16 18:59:20
实现应用. 工作流程为:1) 收到充电指令后, 天轨搭载机器人移动到对应的充电桩, 移动过程中3D智能相机侦测移动前方是否有障碍物, 3D相机侦测充电枪
2025-07-07 08:47:04
随着国内首个人形机器人全产业链专业展在杭州召开,从特斯拉到宇树科技,从减速器到伺服控制器,从仿生驱动到脑机接口,人形机器人正在成为全球科技竞逐的下一个战场。而在这场高调亮相的科技浪潮背后,有一种元件虽不发光发热,却是整机动作节奏的关键——晶振(Crystal Oscillator)。
2025-07-03 14:27:09830 【摘 要】以嵌入式运动控制体系为基础,以移动机器人为研究对象,结合三轮结构轮式移动机器人,对二轮差速驱动转向自主移动机器人运动学和动力学空间模型进行了分析和计算,研究和设计了自主移动机器人电机驱动
2025-06-11 14:30:14
机器人驱动方式可分为液压驱动、气体驱动和电机驱动三种,其中电机驱动是应用最广泛的方式,具有高精度、实时响应等优势,更适合当今人形机器人的发展趋势。 图1、机器人驱动方式比较(图源:头豹研究院
2025-05-30 13:25:142027 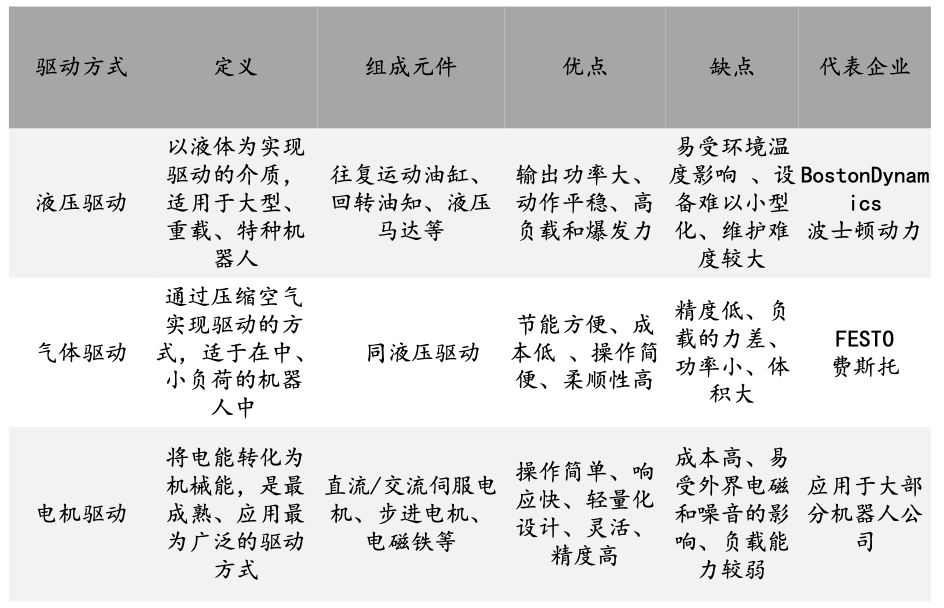
机器人能够四处移动并执行所需的任务。MOTIX™ IMD701A完全可编程电机控制器充分彰显了英飞凌在这一领域的专长,该控制器结合了XMC1404微控制器和MOTIX™ 6EDL7141三相栅极驱动器
2025-05-20 09:37:282170 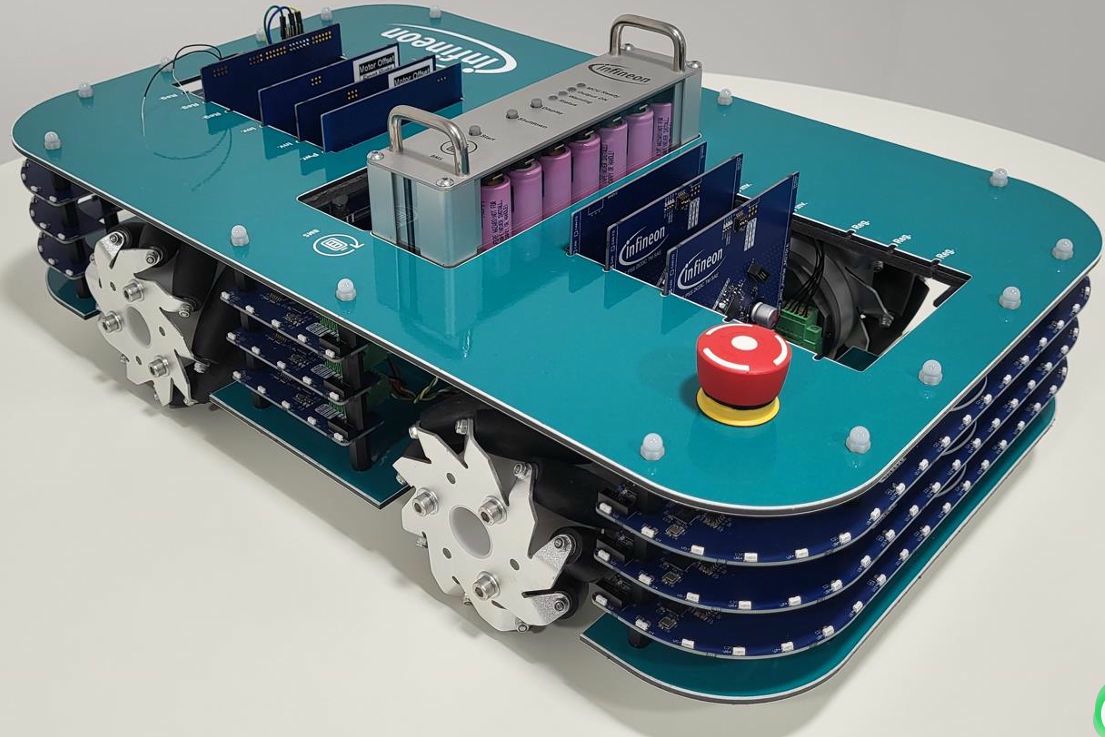
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-电子发烧友网
2025-05-13 15:02:04
机场智能指路机器人主要依靠感知系统、定位系统、导航系统、智能交互系统和运动系统协同工作,来实现为旅客准确指路和提供服务的功能,以下是其详细工作原理:
感知系统
传感器类型 :机器人配备了多种传感器
2025-05-10 18:26:31
人形机器人电机驱动与传感技术现状与趋势 1. 电机驱动关键技术与趋势 伺服电机 :人形机器人关节常采用闭环伺服系统,包含无刷电机、减速器、编码器和驱动器。例如优必选的关节驱动集成了高密度无框力矩电机
2025-05-09 16:39:171867 ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人快速开发
2025-04-30 01:05:09
一、前言
步进电机驱动器是一种用于控制步进电机运动的装置,它是将控制信号转换成步进电机可以识别的控制电压或电流的电路。它在工业自动化领域有着广泛的应用,如机器人、印刷机、木工机床、喷绘机等。步进电机驱动器的组成结构主要由以下部分:
2025-04-27 17:52:52695 
电子发烧友网站提供《人形机器人电机驱动和传感报告.pdf》资料免费下载
2025-04-27 13:41:42 737
737 讲解了如何在 ROS 2 中实现机器人的运动控制,包括速度控制、位置控制等。通过编写运动控制节点,可以接收来自上层的控制指令,如速度指令或目标位置指令,然后通过底层的驱动程序控制机器人的电机,实现机器人
2025-04-27 11:24:32
东元伺服驱动器的报警代码是用于指示驱动器运行过程中遇到的故障或异常状态的重要信息。以下是一些常见的东元伺服驱动器报警代码及其对应的故障原因: 1. AL-00:无报警。表示伺服驱动器当前没有检测
2025-04-23 17:58:296244 
实验名称:爬行机器人实验与分析 测试目的:实验包括压电驱动器性能测试和爬行机器人单元节运动测试。其中压电驱动器性能测试主要通过激光位移传感器采集压电驱动器在工作电压下的输出特性相关数据,一方面与理论
2025-04-23 10:27:18440 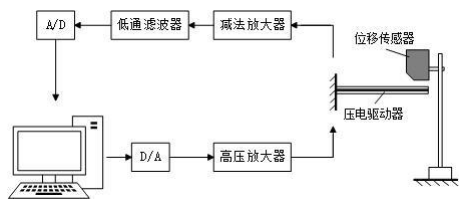
根据国际机器人联合会(IFR)发布的《世界机器人报告》,目前全球约有428万台机器人在各类工厂中为我们“打工”,而且随着智能制造的发展,这个数据还在不断地攀升。
2025-04-17 14:20:311024 GTS机器人位置精度激光跟踪测量仪是高精度、便携式的空间大尺寸坐标测量机。它集激光干涉测距技术、光电检测技术、精密机械技术、计算机及控制技术、现代数值计算理论于一体,主要用于百米大尺度空间三维坐标
2025-04-14 11:00:17
机器人能够四处移动并执行所需的任务。MOTIX™IMD701A完全可编程电机控制器充分彰显了英飞凌在这一领域的专长,该控制器结合了XMC1404微控制器和MOTIX™6EDL7141三相栅极驱动器IC
2025-04-11 18:33:441419 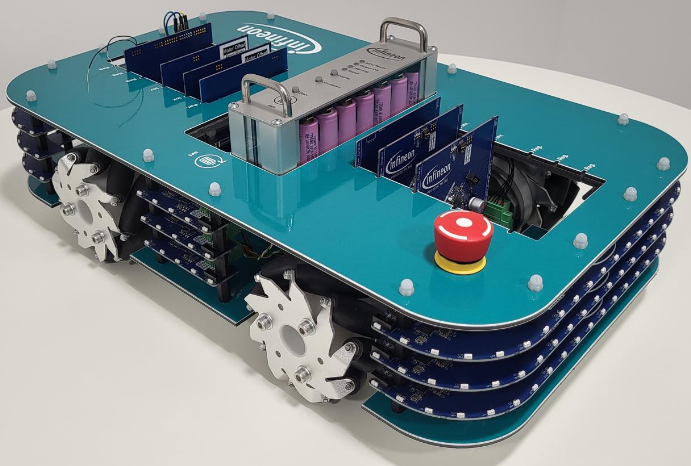
机器人核心部件——新一代一体式关节产品和低压伺服驱动器,产品覆盖机器人从精密操作到高负载运动的全场景需求,技术指标全面对标国际顶尖水平,部分性能甚至实现超越。 广汽集团机器人研发团队负责人张爱民 发布具身智能机器人
2025-04-09 18:08:361498 
电子发烧友网报道(文/吴子鹏)随着 AI 大模型、电机驱动和多模态传感等核心技术不断取得突破,人形机器人正处于技术突破与规模量产的临界点,展现出巨大的发展潜力。《人形机器人产业研究报告》指出,中国人
2025-04-09 00:07:002936 
在工业机器人精准抓取的瞬间,在晶圆搬运设备高速运转的毫秒间,传统伺服电机外置线缆的干涉风险、笨重的体积限制,是否已成为制约设备性能的"阿喀琉斯之踵"?哈默纳科HMA系列中空伺服电机,以创新设计突破传统结构限制,为高端装备提供兼具高功率密度与灵活性的驱动解决方案。
2025-04-08 08:42:39782 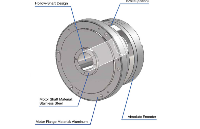
近日,由Big-Bit商务网主办,《半导体器件应用》杂志承办的2025中国电机智造与创新应用暨电机产业链交流会(春季)于深圳召开。国民技术副总经理钟新利受邀在伺服电机智能控制与机器人技术创新研讨会上发表了题为“N32H系列高性能MCU赋能伺服与机器人应用创新”的主题演讲。
2025-04-02 11:20:151410 机器人激光焊接机:高精度自动化焊接的未来1. 概述机器人激光焊接机是一种集成了工业机器人和激光焊接技术的先进自动化设备,通过高能量密度的激光束实现快速、精准的焊接。该系统结合了机器人的灵活运动
2025-03-28 14:04:12
伺服系统是指以位置、速度、转矩为控制量,能够动态跟踪目标变化从而实现自动化控制的系统,主要包括伺服驱动器、伺服电机和编码器,是实现工业自动化精密制造和柔性制造的核心技术。▲典型伺服系统组成结构图01
2025-03-27 17:45:581581 
GTS机器人位姿精度激光跟踪校准仪与空间姿态探头配合,能够根据合作目标的精确空间姿态对被测工件的内部特征、隐藏特征或曲面等复杂特征进行快速、高精度的测量。广泛应用在飞机、汽车、船舶、航天、机器人
2025-03-25 18:10:11
,以及强大的实时通信。 资料亮点: *附件:工业机器人设计工程师必备指南.pdf 全链路技术解析 : 从控制器架构(Sitara™处理器)、伺服驱动(隔离式栅极驱动器设计)到机械臂传感(毫米波雷达、超声波技术),覆盖工业机器人核心
2025-03-20 18:58:451243 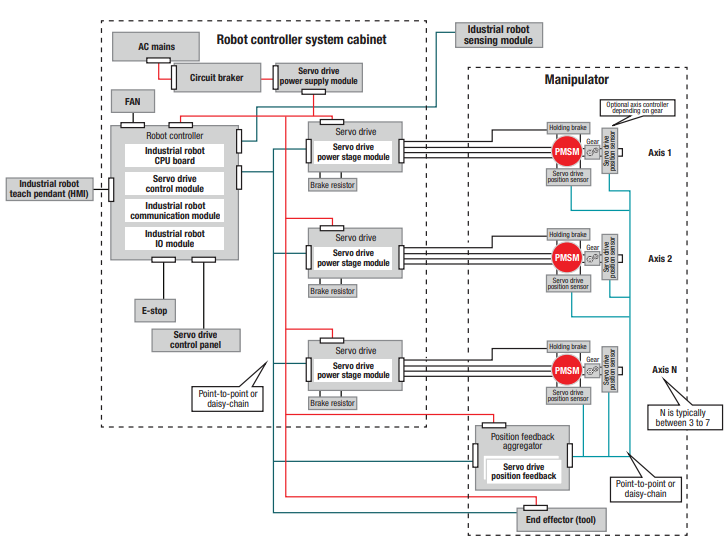
在智能机器人与高端设备的世界里,关节电机驱动是赋予它们灵动身姿的关键。它集成电机、减速器、传感器和驱动电路,精准控制运动。本文将深入剖析其核心技术,揭秘两款高性能驱动模块,一同探寻智能运动的奥秘
2025-03-13 11:37:452393 
为了适应越来越短伺服驱动器的设计,使用多圈 绝对值旋转编码器的长度和直径也必须减少。
机器人和数控机床制造商比以往任何时候都 需要具有更高效率更精确和更紧凑型驱动器。为 了满足这些未来的需求,史陶
2025-03-12 16:58:47
; ⑤盘管灌溉不足; 2.维修期间KUKA机器人伺服电机过热故障排除 ①降低电源电压(例如,调整电源变压器的抽头); ②增加电源电压或更换电源; ①修理铁芯并排除故障; ①减载;按照规定时间检查启动; ⑤采用二次浸渍和真空浸渍工艺; 机器人PCB维护中未发现错
2025-03-08 09:16:201615 伺服电机作为机器人运动控制的核心部件,其高精度、高响应速度和高负载能力等特点,为机器人的精确运动提供了有力保障。在工业机器人、医疗机器人、服务机器人等领域,伺服电机都有着广泛的应用。然而,随着机器人
2025-03-07 16:38:541672 
泰科机器人在2024年年底传来捷报,成功斩获上海某机器人公司近千万订单!订单涵盖了100+人形机器人手臂,涉及1000+精密关节模组。尤为更重要的是,用于人形机器人腿部、腰部及头部的伺服驱动模块,订单量更是高达500+。
2025-02-28 08:44:131421 
泰科机器人针对“模块化电机伺服驱动器”榜单形成的技术解决方案被评为优秀解决方案,其攻关成果在测评比选中胜出,泰科机器人被评为优胜单位,并且入选榜主单位“中兵智能创新研究院”的生态合作伙伴名单。该活动
2025-02-26 09:12:571180 
驱动器的主要类型包括伺服电机驱动器、步进电机驱动器、直流伺服电动机驱动器、交流伺服电动机驱动器等。 伺服电机驱动器:伺服电机驱动器具有快速响应、高精度、稳定性好等优点,是数控机床的重要驱动器
2025-02-23 15:50:042006 伺服驱动器常见故障及其维修方法主要包括以下几种: 核心常见故障及维修方法: 电源故障: 故障现象:伺服驱动器无法正常启动,或启动后电源指示灯不亮,运行中突然断电12。 维修方法:检查电源
2025-02-22 10:53:145390 伺服驱动器是控制伺服电动机的重要设备,广泛应用于数控机床、机器人、自动化生产线等领域。以下是关于伺服驱动器的一些关键信息和常见故障及其解决方案: 一、伺服驱动器的基本功能 伺服驱动器接收来自控制器
2025-02-22 10:51:19958 MJA-H系列轻量化关节模组• 专为轻量型人形机器人手臂应用研发,提供定制化服务• 集谐波减速器、电机、编码器、驱动器于一体• 定位精度高,可靠性稳定性大幅提升• 精巧
2025-02-21 15:04:19
HJR系列带力控旋转关节模组• 专为人形机器人应用研发,提供定制化服务• 集谐波减速器、电机、抱闸、编码器、驱动器、扭矩传感器于一体• 创新的谐波减速器结构,让关节模组整体轻量化程度进一步提升
2025-02-21 14:59:52
HJL系列行星滚柱丝杠线性关节模组• 专为人形机器人应用研发,提供定制化服务• 集行星滚柱丝杠、电机、编码器、拉压力传感器于一体• 强大推力,性能强劲,稳定可靠• 精巧结构设计,整体轻量化程度进一步
2025-02-21 14:55:54
、位置和力矩控制。具体来说: 速度控制 :伺服驱动器可以调整伺服电机的速度,实现精确的速度控制。这在需要变速运动的应用中非常有用,通过设置相应的参数,可以优化速度控制性能,达到运动过程中的稳定速度要求12。
2025-02-20 10:06:132912
工业机器人数控机床XY机械手双轴机器人堆垛机专用双轴伺服电机驱动控制器48V 14ARMS带有STO功能,隔离高压CAN/RS485/USB通讯支持编码器和霍尔输入- TMCM-2611
双伺服
2025-02-15 12:14:19
:探讨在人形机器人中的应用优势.pdf 人形机器人系统挑战 :人形机器人集成多个子系统,其中伺服控制系统空间受限。为实现类似人类的运动范围,需部署约 40 部伺服电机(PMSM) ,不同部位电机功率需求差异大,且其伺服系统对控制精度、尺寸和散热要求高于传统系统。 GaN FET 在人
2025-02-14 14:33:331508 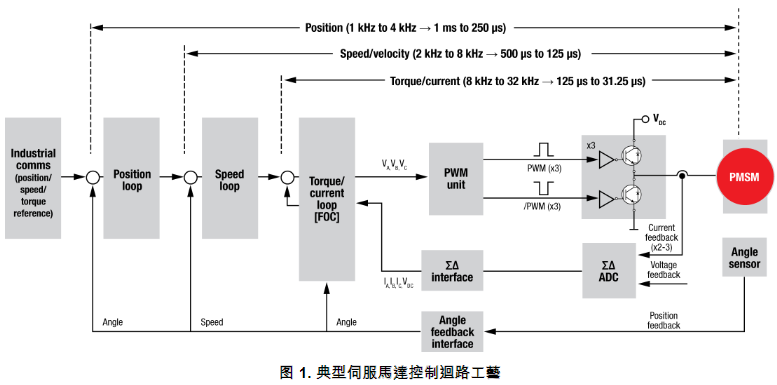
电机、传感器等的工作状态,确保对机器人的整体运行情况有全面的了解。 集中管理 :可以同时对多个机器人进行集中监控和管理。在设备电子地图界面上,管理人员可以方便地切换查看不同机器人的运行状态、位置分布、数量类型、告警频率、
2025-02-14 09:06:34877 马达板和成像板。电机板基于STM32G071微控制器,专用于电机控制和驱动,使用电机驱动器来调节机器人的运动速度和方向。
2025-02-13 16:59:30900 
无法满足高精度、高效率的需求。这时,交流伺服驱动器应运而生,成为现代工业的“智能心脏”。什么是交流伺服驱动器简单来说,交流伺服驱动器是一种能够精确控制电机速度、位
2025-02-08 15:04:321224 
。HPM6E00_EtherCAT_MDR高压伺服EtherCAT从站驱动器总线型伺服驱动器是一种用于控制伺服电机的设备,它通过总线通信协议(如CANopen、EtherCA
2025-02-08 13:38:261083 
一、起动伺服电机前需做的工作有哪些 1)测量绝缘电阻(对低电压电机不应低于0.5M)。 2)测量电源电压,检查电机接线是否正确,电源电压是否符合要求。 3)检查起动设备是否良好。 4)检查熔断器是否
2025-02-08 10:55:281263 将伺服电机自身优势转变成精确速度控制、精确位置控制和精确推力控制,从而实现高精度直线运动。这种特性使其成为人形机器人的核心运动部件,特别是在关节驱动方面。二、替代传统驱动方式在人形机器人中,伺服电动缸
2025-02-06 09:04:39
电机控制器是现代工业自动化和机器人技术中不可或缺的一部分。它们负责精确控制电机的速度、位置和力矩,以实现高效和精确的运动控制。 1. 硬件选择 在开始编程之前,首先需要选择合适的电机和驱动器。常见
2025-01-22 09:37:161461 电子设备,用于控制电机的启动、停止、速度和方向。它通过接收来自控制系统的指令信号,调节电机的输入电压和电流,从而实现对电机的精确控制。电机控制器的种类繁多,包括变频器、直流调速器和伺服驱动器等。 伺服系统的基
2025-01-22 09:35:461590 。 HPM6E00_EtherCAT_MDR高压伺服EtherCAT从站驱动器 总线型伺服驱动器是一种用于控制伺服电机的设备,它通过总线通信协议(如CANopen、EtherCAT等)与上位机或控制系统
2025-01-09 15:45:311802 
用于需要高精度和高速度的应用中,如数控机床、机器人等。 2. 微步驱动器/细分驱动器:通过细分步进角或微步技术来提高电机的运动平滑性和精度。这种驱动器广泛应用于需要精细运动控制的场合,如3D打印机、激光雕刻机等。 3. 双极性驱
2025-01-06 08:08:561700 
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论