伺服技术作为现代自动化领域的核心技术之一,已广泛应用于工业控制、机器人、航空航天等高精度场景。其核心是通过闭环反馈实现精准的位置、速度或力矩控制,本文将系统解析伺服系统的构成、工作原理及关键技术
2025-12-30 07:39:21 148
148 
都只是停留在表面,没有在项目中经历过,也没有更深入的去了解。[img][/img]很早之前年的单片机可能没有输出速度这个配置选项,但是这后面的单片机基本都有配置速度的选项,下面结合STM32来简单介绍
2025-12-29 07:45:51
在智能设备追求极致性能的战场上,每一个传感器的选择,都悄然定义了产品的未来。当自动驾驶汽车判断路况、工业机器人完成精密装配,或是手机实现丝滑的屏幕转向,其核心感知官—加速度计—的性能,直接决定了体验的成败。而在技术路径的十字路口,直流闭环与交流开环这两种架构,正上演着一场关于感知哲学的根本对决。
2025-12-23 15:11:50307 
各型号的CW32微控制器在核心架构上有何区别?
2025-12-16 07:52:38
法拉电容放电速度受负载电阻、温度和湿度影响,合理设计电路和控制环境可延长其使用寿命。
2025-12-08 09:23:00497 
伺服电机增益调节是运动控制中的核心环节,直接影响系统的响应速度、稳定性和精度。本文将深入解析增益参数的作用机理、调节方法及典型应用场景,帮助工程师实现伺服系统的最佳性能匹配。 一、增益参数
2025-12-08 07:42:00614 PLC、DCS等控制器与伺服驱动器、变频器、远程I/O等现场设备之间的数据交互,对实时性要求较高。近年来工业通信技术的发展也印证了这一点——以太网逐步取代串口RS485,Profinet广泛应用并替代Profibus,以及EtherCAT等高速总线技术的普及,都体现
2025-12-07 14:42:091930 
允许编译器生成更高效的代码,因为访问变量时不需要额外的地址计算。这样可以减少指令周期,提高执行速度。直接寻址通常用于内存限制较小的存储区域,如8051微控制器的内部数据存储区(通常为128字节
2025-12-04 06:28:47
一、 概述 中国产业升级持续提速,制造业智能化、自动化迈入新阶段,市场对高精度电机控制器的需求日益迫切。伺服控制器作为精准控制与自动化生产的核心部件,其市场规模正随产业升级浪潮持续扩大。在机器人
2025-12-01 19:56:095557 
。本文将从基础原理到前沿技术,系统梳理伺服电机的控制方式及其应用特点。 一、伺服控制的基本架构 伺服系统由伺服电机、驱动器、控制器和反馈装置构成闭环控制回路。其核心是通过实时比较目标指令与反馈信号的偏差,采用PID算
2025-12-01 07:37:18429 
在惯性导航与姿态控制这一尖端技术领域,系统感知运动状态的能力直接决定了其精度与可靠性。而将物理世界的加速度精确转换为可用电信号的关键,在于一个核心部件——加速度计伺服电路模块。该模块专为光电加速度
2025-11-28 15:43:02234 伺服控制系统的精准控制依赖电源、信号、刹车指令的稳定传输,任何环节的传输波动都可能导致位置偏差、速度抖动或制动延迟。电子谷伺服连接线针对这一核心需求,以动力线、信号线、刹车线的协同设计,适配多品牌
2025-11-28 08:03:33529 
Parker提供了多款不同的伺服电机,性能各有不同,针对特定易燃易爆场所使用的防爆伺服电机,与普通通用伺服电机存在诸多区别,接下来就进一步看看Parker防爆伺服电机与普通伺服电机的区别
2025-11-20 13:36:27266 
S7-1200系列PLC可以通过PROFINET与V90 PN型伺服驱动器组合进行速度控制,S7-1200 PLC负责发送控制命令和速度给定,并读取V90伺服驱动器状态和实际转速;V90伺服驱动器
2025-11-12 14:20:544039 
。1.核心原理:加速度计测量的是什么?加速度传感器(accelerometer)的核心功能是测量“比力”,也就是物体所受的非引力的合力(如推力、拉力、阻力等)所产生
2025-10-31 13:09:04907 
舵机伺服编码器是用于实时检测舵机输出轴位置、速度或角度的核心反馈元件,它能将机械运动转化为电信号,让控制系统实现对舵机的精准闭环控制。 这个问题切得很准,它直接指向了舵机 “精准控制” 的关键所在
2025-10-30 10:05:00174 大家在运动控制的时候是用伺服电机的还是用步进电机做定位控制了?为什么有时候用伺服电机,有时候又步进电机?这是什么原因呢?本期我们就一起来探讨一下步进电机和伺服电机的区别!
2025-10-15 14:32:511496 
、本质定义:范围与从属关系 首先要明确二者的 “包含关系”—— 舵机是伺服电机的一种特殊形式 ,但伺服电机的范畴远大于舵机。 伺服电机(Servo Motor) :广义上指 “可根据输入信号(如位置、速度、扭矩指令)精确控制运动参数的
2025-10-13 10:21:071171 的基础原理 伺服系统的参数调整本质是通过PID控制算法实现对机械系统的精确匹配。位置环、速度环、电流环的三环结构构成伺服控制的基础框架,其中位置环作为最外环决定最终定位精度,速度环影响动态响应特性,电流环则直接控
2025-10-13 07:41:34854 
电液伺服系统是现代工业控制领域的一项关键技术,它将电子控制的灵活性与液压系统的高功率密度完美结合,形成了一种响应速度快、控制精度高的闭环控制系统。这类系统由电信号处理装置和液压动力机构组成,通过反馈
2025-09-25 11:15:46449 
电动静液作动器(EHA)以其高精度、高动态响应的机电液一体化闭环控制,成为飞行器舵面、机器人关节等尖端领域的“心脏”。然而,这份卓越性能的背后,是高昂成本的现实:精密伺服电机、高性能变量泵、高精度
2025-09-25 11:05:38630 算法实现精准控制的关键环节。传统的开环电流传感器存在精度不足、温漂大、动态响应慢等问题,难以满足现代工业对高效、安全、智能化的需求。在这种情况下,CR1V闭环霍尔
2025-09-22 14:01:31829 
我用labview FPGA来进行直线电机闭环控制,控制器是cRIO 9049 ,ni 9234输入,ni 9263输出,一直会有一个很大的延时,将输入换成ni 9205延时减小了一点,但依旧存在,这是为什么呢?
2025-09-21 22:19:59
Q:加速度传感器与倾斜传感器有何区别?A:Murata的倾斜传感器和加速度传感器,都以相同的MEMS容量测量技术为基础。产品根据目的被优化,因各自使用的g量程而异。倾斜传感器的g量程最大值为地球重力
2025-09-10 12:02:54640 "MT6835绝对式磁编码器赋能闭环步进电机,实现±0.05°高精度控制,解决传统开环系统的失步与振动问题,工业应用合格率提升至99.5%。"
在工业自动化、机器人技术以及
2025-08-29 17:22:081053 基于MT6835磁编码器IC的步进电机全闭环伺服控制策略,通过引入高精度位置反馈和先进控制算法,实现步进电机性能的显著提升。
2025-08-27 17:55:08843 在自动控制系统中,开环控制、半闭环控制和闭环控制是三种基础的控制方式,它们以不同的信息处理机制实现系统调节,广泛应用于工业自动化、机器人、数控机床等领域。理解这三者的原理及差异,对优化控制
2025-08-25 07:39:003068 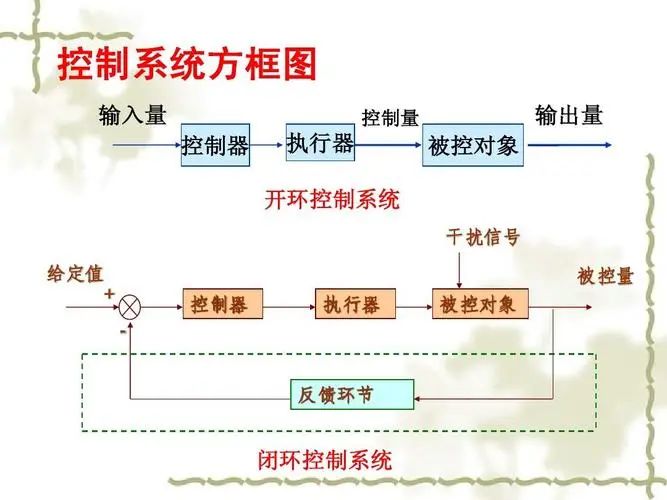
光电加速度计的伺服电路是一个精密的模拟控制系统,它通过强大的负反馈,用电气量的精度“替代”了机械位移的测量,从而实现了远超开环传感器的卓越性能。
2025-08-22 16:43:15501 
,但先从反馈说起。构建稳定精确系统需建立控制系统,监测被调节变量并与参考值比较,偏差产生误差信号,经补偿器驱动功率级,形成闭环控制。闭环表达式中,环路增益T(s)=G(s)C(s),频域里开环增益在穿越
2025-08-21 12:00:02
变化器在开环工作条件下的表现。并给出了开环表达式。如果学过自动控制理论,相信很容易得出表达式。如果没学过,建议去看一看,不然后面会有很多疑惑的。
2、反馈
此处引入了反馈的概念。并给出了一个典型的闭环控制
2025-08-16 17:54:13
随着工业自动化、机器人技术和高端装备制造的快速发展,伺服电机作为核心驱动部件,其控制精度和响应速度的要求不断提升。传统的伺服电机控制主要依赖于光电编码器或旋转变压器进行位置反馈,但这些技术在高转速
2025-08-05 17:44:44859 伺服控制器作为工业自动化系统中的核心部件,其稳定性和抗干扰能力直接影响设备运行精度与可靠性。在实际应用中,电磁干扰、电源噪声、接地不良等问题常导致伺服系统出现误动作、定位偏差甚至设备损坏。本文将结合
2025-07-31 18:13:591395 
光纤的传输速度因技术类型和应用场景不同而存在显著差异,其理论速度、实际家用速度及前沿实验成果可归纳如下: 一、理论速度:突破物理极限 基础理论值 光在真空中的传播速度为每秒30万公里,在光纤中因材
2025-07-25 10:24:076356 。速度和方向传感器信息是系统的重要输入控制器,用于提供适当的车辆控制。解决方案霍尼韦尔SNG-Q系列正交速度和方向传感器设计用于测量安装在交流感应电机轴上的铁磁材料
2025-07-18 12:08:13997 解析。 一、核心原理与技术架构差异 1. 控制对象本质不同 伺服系统采用闭环控制,通过编码器实时反馈电机转速、位置等参数,形成高精度闭环调节。其核心由伺服电机(通常为永磁同步电机)、高分辨率编码器(17位以上)和专用
2025-07-13 16:30:021698 
这种技术组合的价值,不仅在于实现协议转换的基础功能,更在于通过精准的速度阈值控制,为智能制造系统装上了"感知神经"。当生产设备能够自主判断运行状态并触发后续动作,工业4.0所追求的柔性化生产才真正具备落地基础。
2025-07-13 09:21:01426 
在工业自动化系统中,不同总线协议的设备互联常面临技术挑战。本文将围绕EtherCAT主站转Profinet网关与汇川伺服驱动器的协同应用展开,重点解析目标速度控制的实现逻辑与实操要点。
2025-07-10 11:51:27443 摘要:为了提高永磁同步直线电机伺服系统的动态性能,提出了一种新型的自适应鲁棒控制器。该控制器不含电机参教,只与系统的状态变量有关,从而降低了对系统模型参数的依赖性。基于Lya-punov理论
2025-07-09 14:24:34
摘 要:无速度传感器感应电机控制技术已成为近年的研究热点,转逸估计是无速度传感器感应电机控制技术的核心问题。在此对无速度传感器感应电机转速辦识技术进行了介绍,分析了几种比较典型的转速解识方法的理论
2025-07-09 14:23:31
摘 要:为了便于对无刷直流电机的运行特性和控制策略的研究,文章详细的介绍了无刷直流电机工作原理和数学模型,提出无刷直流电机的控制策略,采用电流环为内环,速度环为外环的双闭环控制,并根据数学模型搭建
2025-07-08 18:33:31
对于开环式霍尔电流传感器而言,多匝穿心利大于弊,因此在使用该方法提升测量精度时需注意穿心方式,用户可在一定程度内提高小电流测试精度;对于闭环霍尔电流传感器尤其是高精度的闭环霍尔电流传感器而言,提高测量精度不适宜采用多匝穿心方式。
2025-07-01 15:28:15667 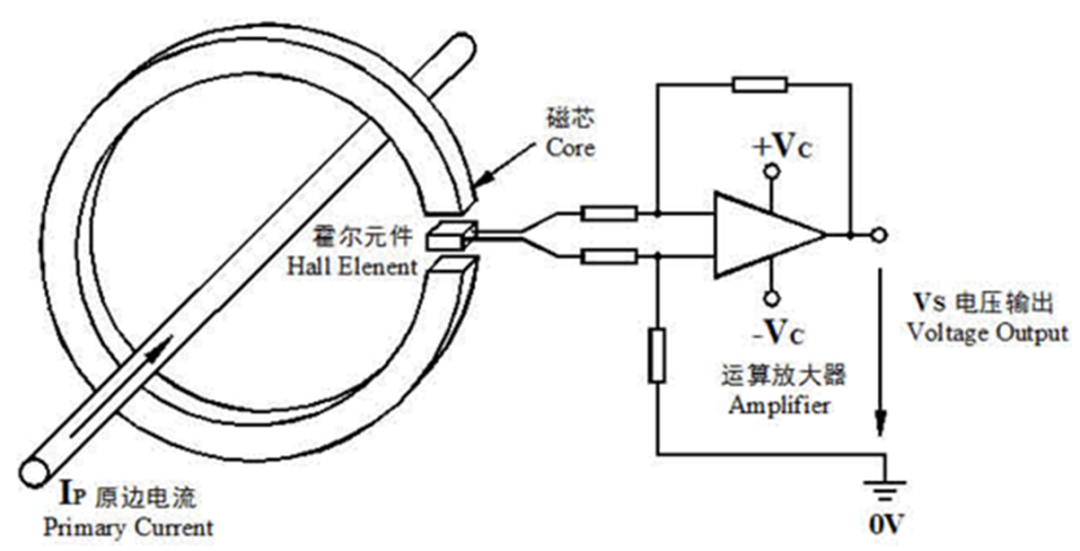
PLC与伺服控制在控制对象、控制方式、硬件结构、应用场景、系统精度与灵活性等方面存在显著区别,以下是具体分析: 控制对象 PLC:适用于逻辑控制、运动控制、流程控制等,可对生产线、机械设备等进行整体
2025-06-25 17:54:091120 不同
步进电机开环控制无反馈;伺服电机闭环控制能直接对电机编码器反馈信号进行采样,性能更为可靠
过载能力不同
步进电机一般不具有过载能力启动频率过高或者负载过大的时候容易丢失;伺服电机的过载能力是比较
2025-06-18 13:27:36
什么是伺服电机编码器?
伺服电机编码器是伺服系统中的核心反馈元件,用于实时检测电机的转速、位置、角度等参数,并将信号反馈给控制器(如伺服驱动器),形成闭环控制,确保电机运动的精准性和稳定性。
其
2025-06-09 11:07:312334 
变频器参数的电流环与速度环的调节是变频器控制中的关键环节。以下是对这两个环节调节方法的详细阐述: 一、电流环的调节方法 电流环是变频器的内环,主要影响输出电流。输出电流决定转矩,转矩进一步决定加速度
2025-06-07 16:16:571610 
霍尔传感器的输出信号通常会被传送到控制系统或显示设备中,用于实时监测和显示转速。控制系统可以根据转速信号进行闭环控制,调整电机的输入电压或电流,以实现恒速控制或变速控制。
2025-06-04 09:12:271230 无速度传感器矢量控制技术能够有效提高交流传动系统的可靠性,降低系统成本。该技术的核心问题是准确获取电机转子转速,并将其反馈到速度闭环控制环节。介绍一种采用改进模型参考自适应转速估计方法的异步电机矢量控制
2025-05-28 15:43:39
、驱动器和控制器组成的闭环运动控制系统。 核心功能 执行程序逻辑、处理输入输出信号、控制外围设备。 实现高精度
2025-05-26 09:18:22664 伺服系统和PLC(可编程逻辑控制器)在工业自动化中扮演不同角色,主要区别体现在功能、结构、应用场景和控制方式上,以下是具体分析: 功能 伺服系统:是一种特殊的运动控制系统,主要功能是实现高精度的运动
2025-05-23 17:53:52874 一种用于步进电机加速度的新算法可以实现速度曲线的实时参数化和计算。该算法可以在低端微控制器上运行,只使用简单的定点算术运算并且不使用数据表。它以恒定的加速度和减速度形成线性斜坡时间的准确近似值
2025-05-14 15:09:45
的是节能,可以选择节能控制方式,这种控制方式能够根据电动机负载的变化自动调整运行参数,达到节能效果。 2. 速度控制: ● 需要精确控制速度时,可以选择闭环速度控制,它利用速度传感器(如编码器)进行反馈,实现高精度控制。
2025-04-28 07:36:00774 
电流超过规定值。 ● 要因与处置:检查伺服马达的动力配线是否漏电或短路。通常,对地间有数MΩ以上电阻,线圈之间的电阻值均衡。 2. 过速度故障(OS) ● 显示:驱动器显示过速度故障。 ● 检出内容:伺服马达的回转速度超过最高速度的1.1倍。
2025-04-23 17:37:364397 
您好 Daniel,amclib 文档中提到了“递归”PI 控制器形式,但似乎该行业的术语与基于神经网络的 PID 有关。我怀疑 AMClib 是这种情况。您能否解释一下 amclib 中 PI 控制器的“标准递归形式”到底是什么?这种形式和常见的平行形式有什么区别?
2025-04-03 07:05:06
带速度传感器矢量控制异步电动机闭环变频调速系统具有显著的特点和优势,以下是对其特点的详细阐述: 1. 宽广的调速范围: ● 该系统可以从零转速起进行速度控制,即使在甚低速下也能稳定运行。因此
2025-03-27 18:01:43887 
伺服系统是指以位置、速度、转矩为控制量,能够动态跟踪目标变化从而实现自动化控制的系统,主要包括伺服驱动器、伺服电机和编码器,是实现工业自动化精密制造和柔性制造的核心技术。▲典型伺服系统组成结构图01
2025-03-27 17:45:581581 
文章来源于网络,纯分享帖,点击附件查看全文(如有涉及侵权,请联系删除!)*附件:永磁同步牵引电机无速度传感器转矩精确控制.pdf
2025-03-27 12:03:06
带速度传感器矢量控制与闭环v/f控制之间存在显著的差异,这些差异主要体现在控制原理、控制精度、启动转矩、安装方式、编码器选型以及编码器断线停机方式等多个方面。以下是具体的比较: 一、控制
2025-03-23 07:42:40941 开源闭环步进电机控制器(原理图+源代码),采用PID算法控制,AS5047磁性角度检测传感器,高效防失步,快速学习PIDS算法,掌握单片机系统开发。
纯分享贴,有需要可以直接下载附件获取资料!
(如果内容有帮助可以关注、点赞、评论支持一下哦~)
2025-03-20 13:32:11
介绍了一种基于成本较低的AT89S52 单片机实现的数字式双闭环PWM 直流电机调速系统硬件 实现电路和软件实现方法。给出由光电编码器检测直流电机转速的具体方法,并构成速度环;由霍尔电流传感器检测
2025-03-20 12:55:42
要将三菱伺服电机设置为无编码器模式(也称为开环控制模式),需要遵循一定的步骤和注意事项。以下是一个详细的指南: 一、了解无编码器模式 无编码器模式是指伺服电机在没有编码器反馈信号的情况下,根据输入
2025-03-20 07:41:441328 处理和分析,以满足各种应用需求。以下为应用与选购技巧。 一、加速度传感器的应用 1. 游戏控制:加速度传感器可以检测上下左右的倾角变化,因此通过前后倾斜手持设备就可以实现对游戏中物体的前后左右方向控制。 2. 图像自动
2025-03-17 16:47:241240 
和执行阶段。 1. 感应阶段:传感器检测到负载的位置、速度和力等信息,并将这些信息传递给控制器。 2. 执行阶段:控制器根据传感器反馈的信息计算出控制指令,通过调节液压元件(如液压泵、阀门等)的工作状态来控制负载的运动。这
2025-03-16 16:43:161387 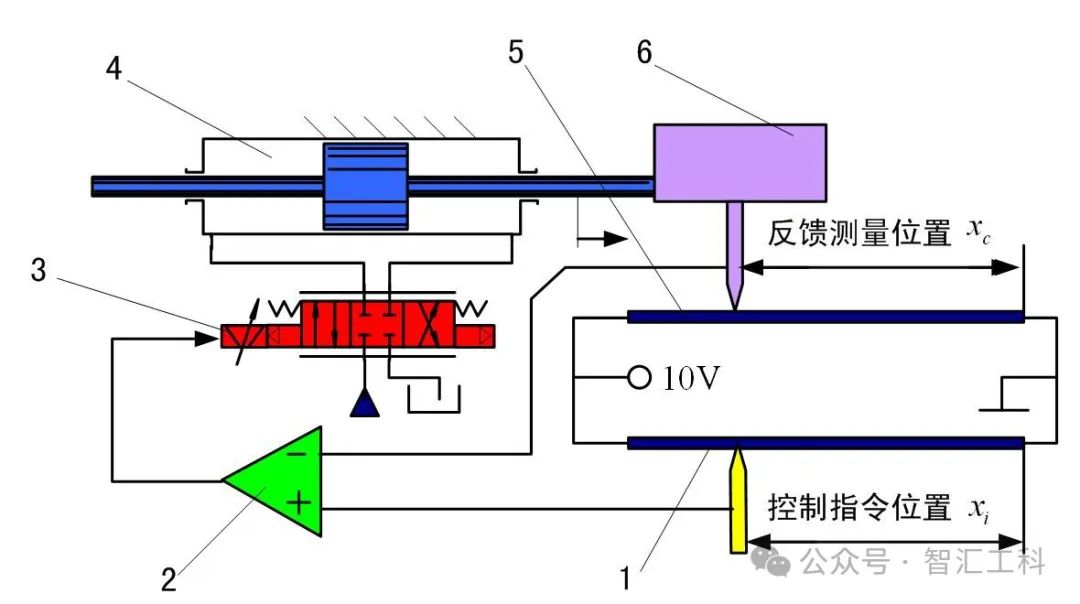
运放和电压比较器的本质区别(1):
放大器与比较器的主要区别是闭环特性!
放大器(如4558和5532)大都工作在闭环状态,所以要求闭环后不能自激.而比较器大都工作在开环状态更
追求速度.对于频率
2025-03-13 13:42:42
工程师您好,我用MCSDK5.4.4的FOC库开发项目,使用的电机是带增量式编码器的永磁同步电机,在速度环开环电流闭环的情况下运行电机,我给定一个目标扭矩,执行完Encoder Alignment
2025-03-12 08:08:30
一种用于步进电机加速度的新算法可以实现速度曲线的实时参数化和计算。该算法可以在低端微控制器上运行,只使用简单的定点算术运算并且不使用数据表。它以恒定的加速度和减速度形成线性斜坡时间的准确近似值
2025-03-04 21:17:04
新品推出背景 正如《必易微推出高性能电流模式控制,半桥 LLC 控制器 KPE2592X》所述,半桥 LLC 谐振型开关电源控制器 KPE2592X 采用电流模式 (Current Mode
2025-02-28 20:04:492180 
ER-QA-03B型航空航天用宽量程石英加速度计具有宽量程、高精度、高可靠性,不仅可用于航空航天惯性测试,还可用于静态和动态加速度测量。此外,加速度计使用温度传感器,操作员可以使用该传感器补偿偏置
2025-02-28 09:48:58
介绍 加速度计是一种惯性传感器,它可以测量由重力引起的线性加速度。MEMS加速度计具有体积小、重量轻、能耗低等特点,可广泛应用于振动检测、姿态控制
2025-02-27 14:39:56
的一小部分。MEMS加速度计具有体积小、重量轻、能耗低等优点。 ER-MA-6是一种惯性传感器,可以测量重力引起的
2025-02-27 14:09:33
目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。同时,控制理论的发展也经历了古典控制理论、现代控制理论和智能控制理论三个阶段。自动控制系统可分为开环控制系统和闭环控制系统。一个控制
2025-02-26 15:22:16
伺服驱动器是控制伺服电动机的重要设备,广泛应用于数控机床、机器人、自动化生产线等领域。以下是关于伺服驱动器的一些关键信息和常见故障及其解决方案: 一、伺服驱动器的基本功能 伺服驱动器接收来自控制器
2025-02-22 10:51:19958 伺服驱动器的主要作用是控制伺服电机,实现高精度的传动系统定位 。 伺服驱动器,又称为“伺服控制器”或“伺服放大器”,是现代运动控制的重要组成部分。它通过接收外部控制信号,对伺服电机进行精确的速度
2025-02-20 10:06:132912 电机驱动控制器TMCM2611功能介绍
l 集成2个伺服电机的控制和驱动于一体
l 供电电压48V,驱动电流14A RMS,尺寸200mm*100mm 重量117g
l 基于硬件FOC的电流环、速度环
2025-02-15 12:14:19
【电磁兼容技术案例分享】伺服控制器产品电机抖动EMC自兼容问题案例
2025-02-11 09:40:25908 
安川电机伺服控制器MP3100、MP3300凭高性能CPU、多轴同步等技术优势,应用于轻工业自动化、电子制造等领域,提升设备精度效率,助力智能制造与绿色生产。
2025-02-11 09:17:231038 
无法满足高精度、高效率的需求。这时,交流伺服驱动器应运而生,成为现代工业的“智能心脏”。什么是交流伺服驱动器简单来说,交流伺服驱动器是一种能够精确控制电机速度、位
2025-02-08 15:04:321224 
总线型伺服器是指利用总线技术将多个伺服驱动器、传感器、控制器等连接在一起,形成一个整体控制系统,实现了伺服系统的联动控制和数据传输。这种集成化的控制方式不仅提高了系统的可靠性和响应速度,还显著降低
2025-02-08 13:42:141580 
舵机和伺服电机在自动化和机器人技术领域中都是常用的执行器,它们都能够实现精确的位置控制,但二者之间存在一些基本的区别,具体如下: 一、定义与构成 1. 舵机
2025-02-07 07:37:411933 
一、产品简述 MS39531N 是一款正弦驱动的三相无感直流电机驱动器,具有最小振动和高效率的特点。该驱动器内部集成了基本的闭环速度控制功 能,能够根据特定的应用定制电机速度曲线,可脱离
2025-02-06 15:24:42855 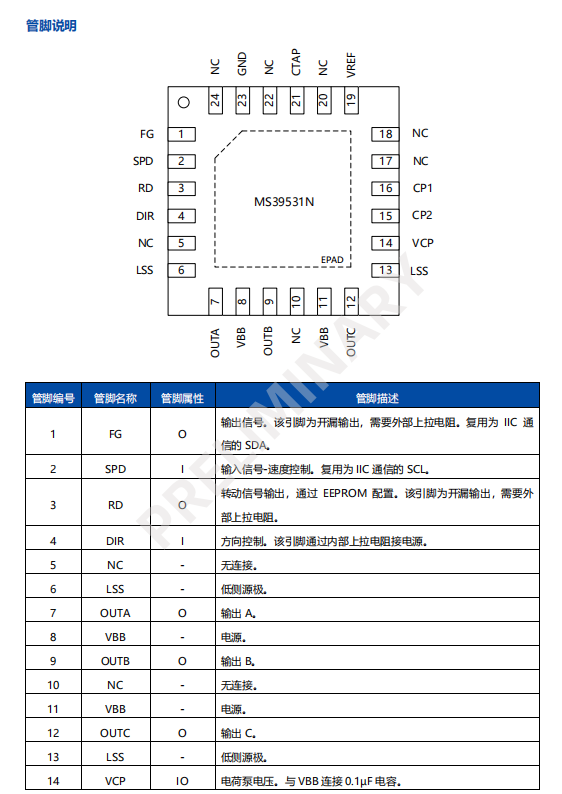
高压伺服控制器的工作原理基于反馈控制原理,通过不断比较指令信号和反馈信号,计算出偏差信号,并据此调整控制信号,使被控对象的运动状态逐渐接近指令信号所要求的状态。
2025-02-03 15:21:001198 一、引言 电机控制器是连接电机和电源的关键桥梁,它不仅负责电机的启动和停止,还负责调节电机的速度和方向。随着工业自动化和智能制造的发展,电机控制器的应用越来越广泛。 二、电机控制器的基本知识 在讨论
2025-01-22 09:40:001432 电机控制器是现代工业自动化和机器人技术中不可或缺的一部分。它们负责精确控制电机的速度、位置和力矩,以实现高效和精确的运动控制。 1. 硬件选择 在开始编程之前,首先需要选择合适的电机和驱动器。常见
2025-01-22 09:37:161463 在自动化控制系统中,电机控制器和伺服系统是实现精确运动控制的关键组件。电机控制器负责接收控制信号并驱动电机,而伺服系统则确保电机按照预定的轨迹和速度精确运动。 电机控制器的基本概念 电机控制器是一种
2025-01-22 09:35:461593 : 脉冲宽度调制(PWM)控制器 :通过调整脉冲的宽度来控制电机的速度和扭矩。 矢量控制(FOC)控制器 :通过精确控制电机的磁场和转矩,实现高效和精确的速度控制。 直接转矩控制(DTC)控制器 :直接控制电机的转矩,适用于需要快速响应的应用
2025-01-22 09:32:583726 电机控制器的主要功能包括: 速度控制 :根据设定的速度指令,调整电机的转速。 转矩控制 :确保电机在不同负载下提供所需的转矩。 方向控制 :改变电机的旋转方向。 保护功能 :过载、过热、过压等保护,以防止电机损坏。 诊断和监
2025-01-22 09:31:283072 控制电机运行的设备,它可以是简单的开关设备,也可以是复杂的微处理器系统。电机控制器的主要功能包括启动、停止电机,调节电机速度,以及保护电机免受过载、过热等损害。电机控制器可以是专门为特定类型的电机(如直流电机、交流
2025-01-22 09:26:332434 1. 工业自动化 在工业自动化领域,电机控制器被广泛应用于各种机械设备中,如输送带、机械臂、机器人等。这些设备需要精确的速度和位置控制,电机控制器能够提供这种控制能力,确保生产过程的高效和稳定
2025-01-22 09:24:002020 在现代工业自动化和控制系统中,伺服电机编码器扮演着至关重要的角色。它能够精确测量电机的位置、速度和方向,为系统提供准确的反馈信息,实现高精度的运动控制。伺服电机编码器作为伺服系统中的关键部件,其性能和可靠性直接影响着整个系统的运行效果。
2025-01-20 14:01:181821 
0、前言 在一个闭环控制系统中,可分为输入参考值、闭环控制器、执行机构、输出参数,反馈系数,这几个部分。 设计一款控制器,可以让系统的输出参数跟踪输入参考值,达到了控制的目的。在直流控制系统中,常用
2025-01-20 10:46:572117 
高压伺服控制器是一种高精度电子装置,用来控制高压伺服电机的位置、速度和力矩,可确保工业机器人、数控机床、喷绘写真、激光切割以及自动化生产线等设备实现高精度运动定位控制。其通过提供高效性能、快速响应
2025-01-14 11:42:47746 
高压伺服控制器是一种高精度电子装置,用来控制高压伺服电机的位置、速度和力矩,可确保工业机器人、数控机床、喷绘写真、激光切割以及自动化生产线等设备实现高精度运动定位控制。其通过提供高效性能、快速响应、优化能量转换效率,保障伺服系统稳定可靠运行,有助于推动智能制造和工业4.0的转型与升级。
2025-01-13 18:06:351781 
在自动化和机器人技术领域,精确控制机械运动是至关重要的。舵机和伺服电机是两种常用的执行器,它们都能够实现精确的位置控制。尽管它们在某些应用中可以互换使用,但它们之间存在一些基本的区别,这些区别影响了
2025-01-08 17:39:212432 本文的关键要点 ・“加速度传感器”是用来检测单位时间内的速度(即加速度)的传感器。 ・从原理方面看,加速度传感器是通过检测因移动或倾斜而引发的与弹簧连接的质量块的位置变化来获得加速度的。 从本文开始
2025-01-08 16:19:112305 
 电子发烧友App
电子发烧友App












 工商网监
工商网监
评论