 智能车的运动控制系统介绍
智能车的运动控制系统介绍

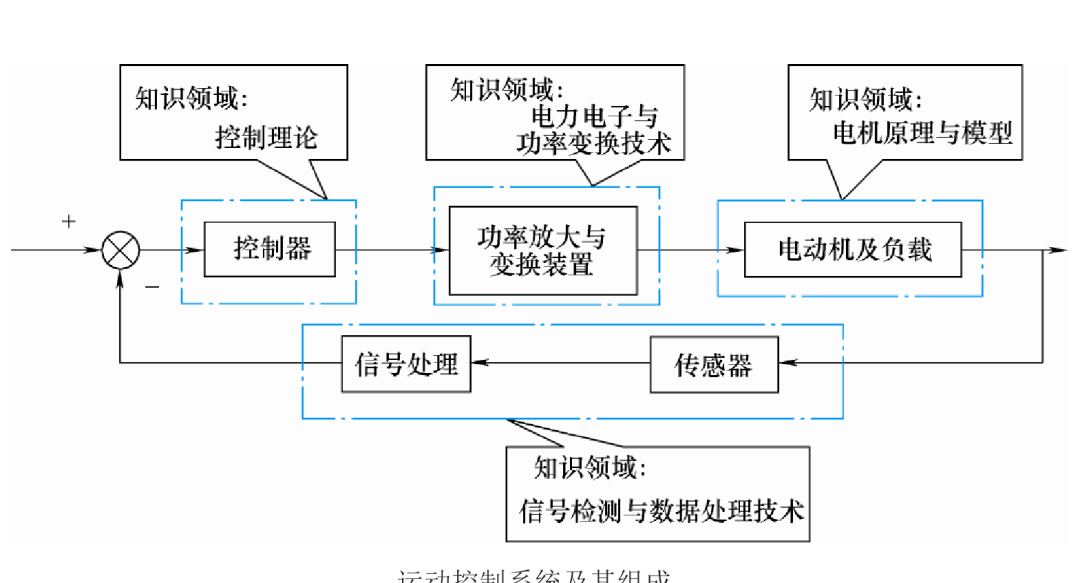
运动控制系统是通过控制电机电压、电流、频率等输入量,来满足工作机械的转矩、速度、位移等机械量,使各种工作机械按照人们期望的要求运行,以满足生产及应用的需要。
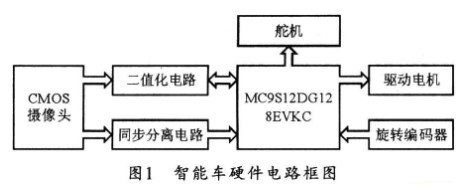
运动控制系统由电机、功率变换装置、控制器及相应的传感器构成,其框图及涉及学科领域如下图:
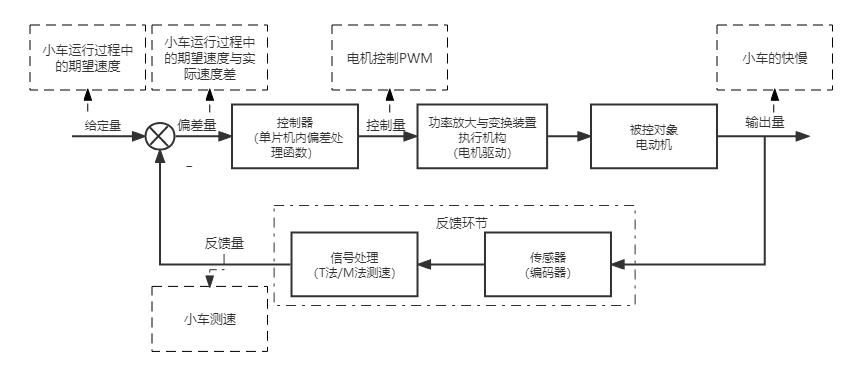
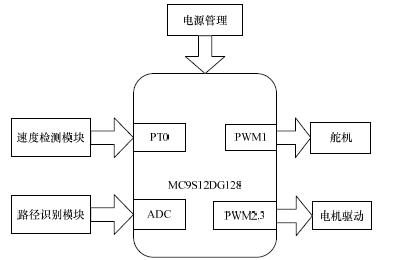
对照运动控制系统的结构框图,可以推断出智能车中的运动控制系统如下:
被控对象
电机是门深奥的学问号称自动化专业的天书之最(笔者当初被电机学折磨的有阴影,故有关电机不做分析)。
(此处所提到的电动机都是车模上指定的普通直流电机,不包括十七届中的无刷电机)智能车中的电机都是用于调速系统的拖动电机,而舵机则是用于伺服系统的伺服电动机的一种。
执行机构
功率放大与变换装置在智能车系统之中指的是电机驱动,能够根据主控输出的信号,动态的调节被控对象(直流电机)的驱动电压来控制电机的转速从而达到控制车身速度的作用。
控制器
智能车运动控制的控制器一般采用数字PI控制(关于PI控制器后面会出一篇PID的文章描述),大家姑且先把PI控制器当做一个公式,只用输入误差,输出的就是根据内部算法计算后的结果。这里借用龙邱科技的 代码片。
// An highlighted block
typedef struct
{
float kp; //P
float ki; //I
float kd; //D
float imax; //积分限幅
float out_p; //KP输出
float out_i; //KI输出
float out_d; //KD输出
float out; //pid输出
float integrator; //< 积分值
float last_error; //< 上次误差
float last_derivative;//< 上次误差与上上次误差之差
unsigned long last_t; //< 上次时间
}pid_param_t;
pid_param_t Speed_PID;
Speed_PID.kp = 130;
Speed_PID.ki = 2.5;
Speed_PID.kd = 0.25;
/*************************************************************************
* 函数名称:void Motor_Control(void)
* 功能说明:电机控制
* 参数说明:
* 函数返回:
* 修改时间:
* 备 注:这类设计PID运算的函数一定要放在定时器中断内保持控制周期稳定
*************************************************************************/
void Motor_Control(void)
{
MotorDuty1 = (int)PidIncCtrl(&Speed_PID, Target_Speed - ECPULSE1);
if(MotorDuty1 > 8000)MotorDuty1 = 8000;else if(MotorDuty1 < -8000)MotorDuty1 = -8000;
if(Speed_PID.out > 8000)Speed_PID.out = 8000;else if(Speed_PID.out < -8000)Speed_PID.out = -8000;
Motor1Ctrl(MotorDuty1);
// 电机闭环控制
}
/*************************************************************************
* 函数名称:float constrain_float(float amt, float low, float high)
* 功能说明:pid增量式控制器输出
* 参数说明:
* @param pid pid参数
* @param error pid输入误差
* 函数返回:PID输出结果 注意输出结果已经包涵了上次结果
* 修改时间:2020年4月1日
* 备 注:
*************************************************************************/
float PidIncCtrl(pid_param_t * pid, float error)
{
pid- >out_p = pid- >kp * (error - pid- >last_error);
pid- >out_i = pid- >ki * error;
pid- >out_d = pid- >kd * ((error - pid- >last_error) - pid- >last_derivative);
pid- >last_derivative = error - pid- >last_error;
pid- >last_error = error;
pid- >out += pid- >out_p + pid- >out_i + pid- >out_d;
return pid- >out;
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电机控制
+关注
关注
3595文章
2058浏览量
275206 -
运动控制
+关注
关注
5文章
793浏览量
34265 -
智能车
+关注
关注
21文章
411浏览量
78305
发布评论请先 登录
相关推荐
热点推荐
基于电磁传感器路径识别的智能车控制系统
文中介绍一种基于电磁传感器路径识别的智能车控制系统,系统采用Freescale16位单片机MC9S12XS128为核心控制器,利用4个电磁传
发表于 03-29 17:23
•1w次阅读
菜鸟一枚 0基础做毕设 基于labview的智能车控制系统的设计
设计目标:①软件设计基于单片机的智能车系统;②实现操作界面登录功能;③实现管理员操作系统界面功能;④实现用户操作系统界面功能;⑤实现智能车
发表于 04-26 20:55
智能车系统解决方案总体设计
大神提出改善的建议。资料在闯客网技术论坛下载 整个系统分为悬停半空的摄像头识别系统和地面的智能车控制系统,这两个系统均采用MKL26Z256
发表于 10-24 19:17
怎么实现基于9S12DG128的智能车控制系统设计?
本文介绍了一种智能车控制系统的设计与实现方法。通过大量实验测试证明,该智能车能快速平稳地在制作的赛道上跟踪黑色引导线并行驶,而且寻迹效果良好,控制
发表于 05-18 06:46
基于NRF24L01的智能车控制系统设计
摘要:针对智能车的控制系统, 选用STC89C52作为整个系统的主控芯片, 并进行硬件电路设计;以NREF24L01作为无线接收模块, 选取E18-D80NK-N红外光电传感器作为避障模块的核心器件
发表于 08-23 07:49
智能车速度控制系统设计与实现
智能车速度控制系统设计与实现
在智能车竞赛中,速度控制不能采用单纯的PID,而要采用能够在全加速、紧急制动和闭环控制等多种模式中平稳切
发表于 11-23 21:12
•3616次阅读
飞思卡尔智能车控制系统设计
本文介绍了一种基于红外反射式光电传感器路径识别的智能车控制系统。单片机获得传感器采集的路面信息和车速信息,经过分析后控制 智能车 的舵机转向
发表于 07-06 17:16
•164次下载

基于单片机和射频收发芯片实现智能车控制系统的设计
设计有效的智能车控制系统必须首先掌握控制对象的特性。根据对智能车特点的分析,可以认为,智能车转向控制系统
如何设计一个具有路径记忆功能的智能车控制系统的资料概述
研究一种具有路径记忆功能的智能车控制系统。该智能车使用红外光电传感器实现路径识别,依靠电机驱动前进,使用舵机帮助智能车转向。该系统采用路径记
发表于 12-07 17:20
•16次下载
基于机器视觉的智能车系统
本文设计并实现一种基于机器视觉的智能车系统。该系统基于目标物体的颜色,采用颜色识别、图像去噪、轮廓检测等算法准确地识别并定位目标物体。另外,智能车的






 工商网监
工商网监
评论