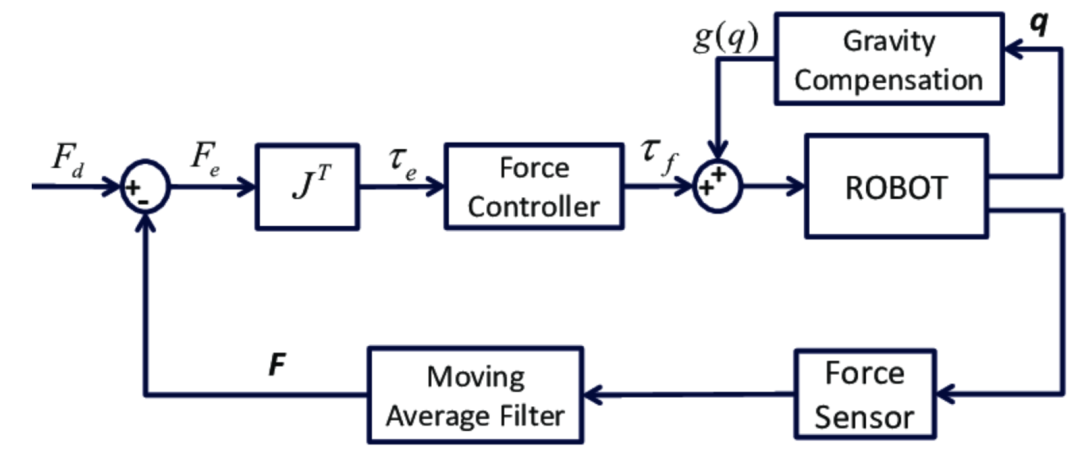
在机器人速度模式下的外环力矩控制中,通常使用速度环和力矩环两个控制环路来实现。速度环控制机器人的关节....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 17:22
•1738次阅读
2.1 启动调试 在程序开始调试之前,要确保程序在gcc、g++编译时,有如下-g的添加调试信息的选....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 17:17
•2376次阅读
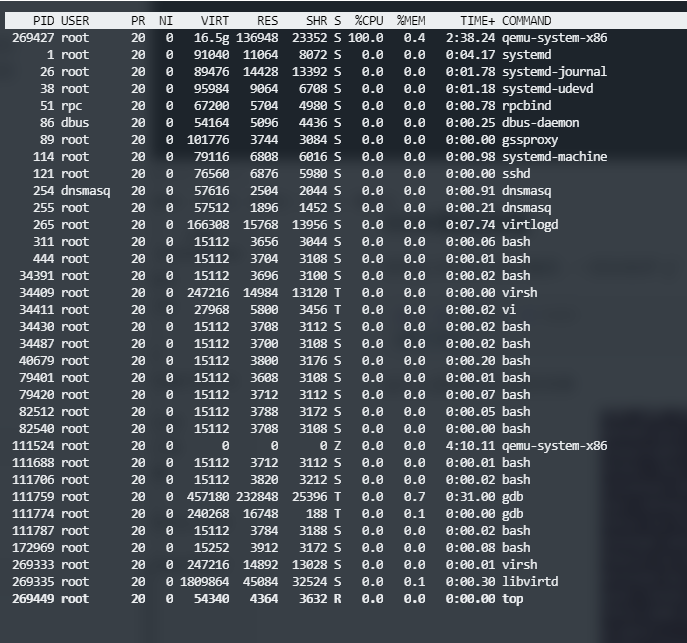
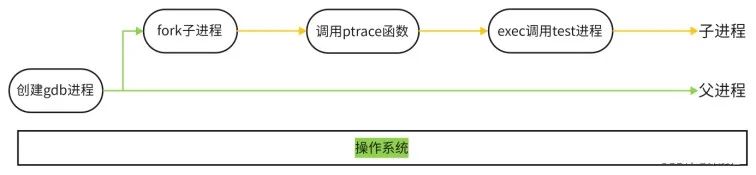
一、GDB调试工具的原理 1.1 未执行进程调试 启用gdb调试运行gdb ./test的时候,在操....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 17:04
•2088次阅读
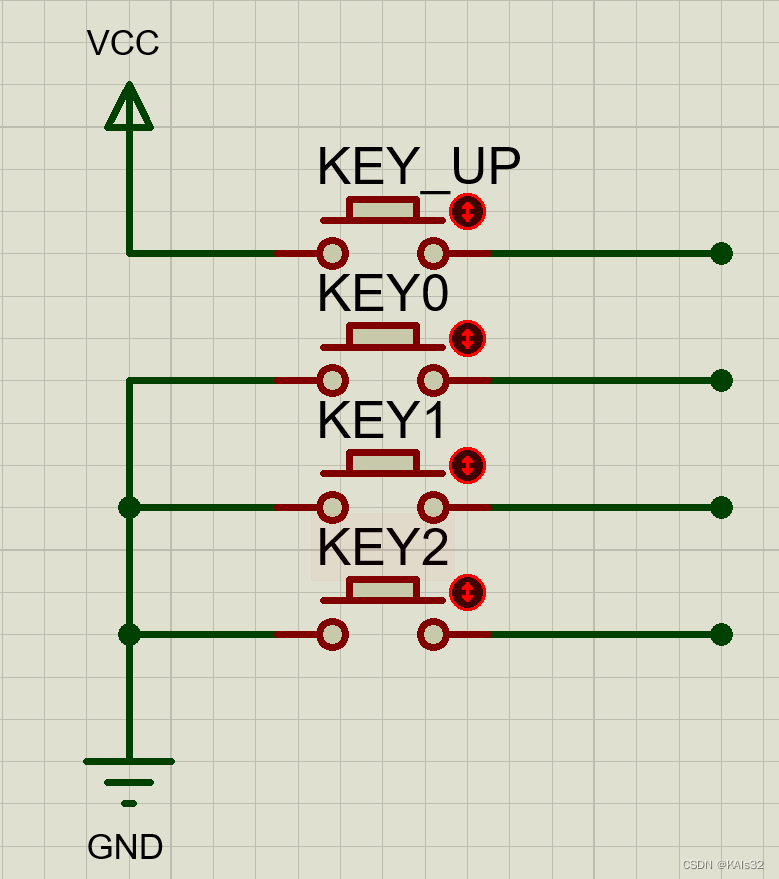
输出模式下,可由芯片向外输出电平。例如点亮LED,就需要给LED提供高电平。 GPIO_Mode_O....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 16:56
•7645次阅读
GPIO的介绍 GPIO (general purpose input output)是通用输入输出....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 16:51
•9736次阅读
从力与运动的角度,阻抗控制实现规律可以总结如下: 1. 力与位移关系:阻抗控制通过建立力与位移之间的....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 16:45
•1448次阅读
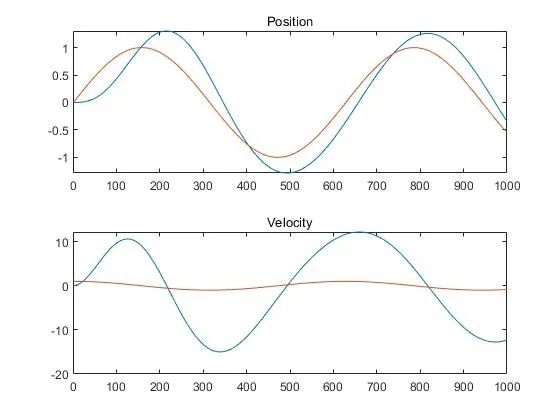
在运动中,位移、速度和加速度与阻抗(惯性、阻尼、刚度)之间存在一定的关系。阻抗控制是一种控制方法,旨....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 16:36
•4163次阅读
力控机器人是一种能够感知和控制外部力或力矩作用的机器人系统。它具有实时感知和响应外部力的能力,通过传....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 16:25
•1356次阅读
在物理人机交互控制中,常用的性能量化指标包括: 1. 动作准确性(Action Accuracy):....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 16:19
•2726次阅读
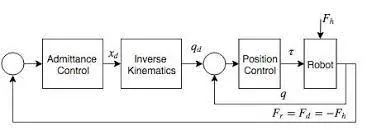
导纳控制框架: 力/力矩传感器:用于测量机器人与环境之间的力和力矩。 导纳控制器:根据传感器测量值和....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 16:12
•2440次阅读
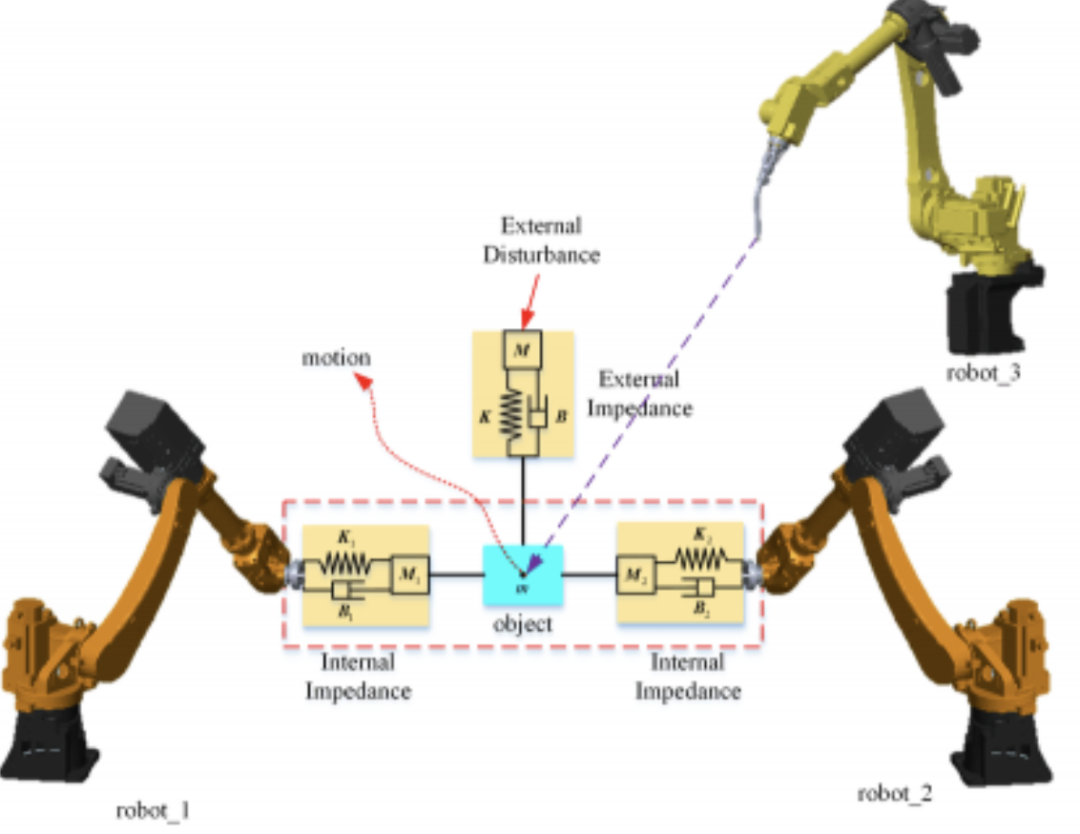
力控机器人常采用柔顺控制算法与人/环境/机器人之间进行直接或间接的物理交互,那么,柔顺控制能够操纵被....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 15:59
•3106次阅读

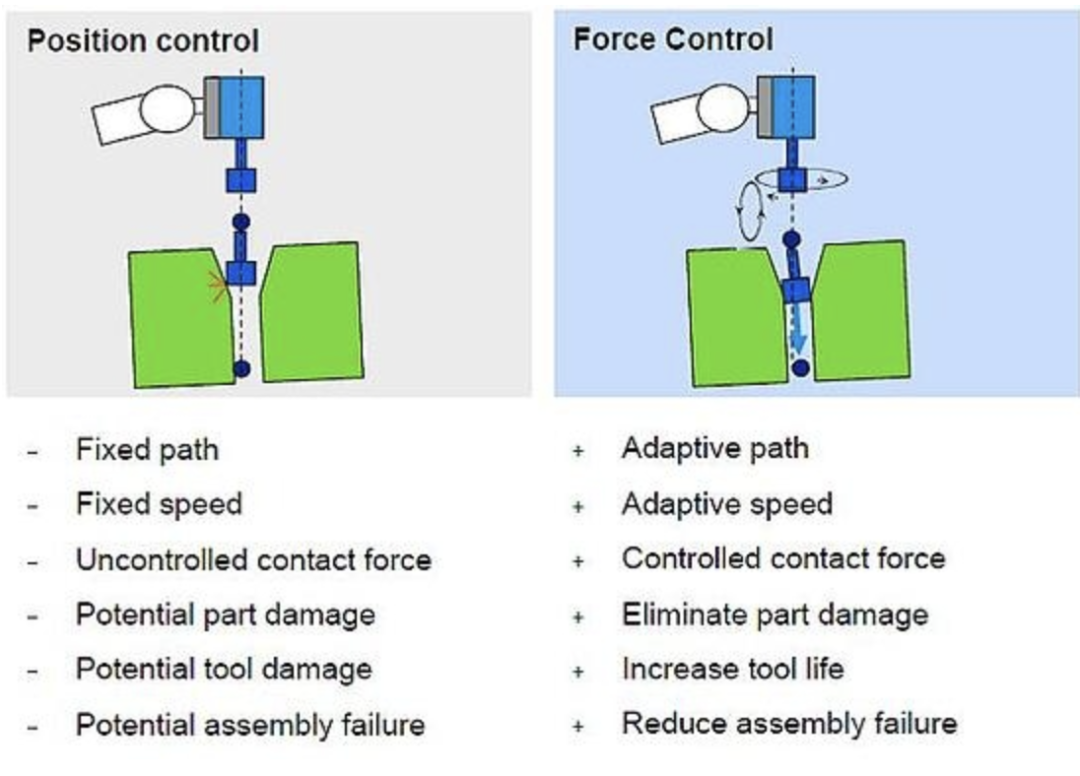
力控机器人是一种能够基于外部力量进行控制和交互的机器人系统。与传统的位置控制机器人相比,力控机器人更....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 15:54
•1485次阅读
在ros里面,是有专门的工具帮忙做这一步的,但是ros2里面还没有,不过我看论坛上大家更加推荐使用代....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 15:37
•1647次阅读
1. 选择哪一种MQTT实现方案 根据前面的介绍,可以知道,要想使用MQTT,必须要有一个服务端。这....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 15:29
•2160次阅读
MQTT 是 Message Queuing Telemetry Transport 的缩写,是一种....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-09 15:20
•3573次阅读
在工业机器人中,阻抗控制是一种非常重要的控制方法,主要用于控制机器人的力和位。通过调整阻抗,机器人可....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-08 18:08
•2499次阅读
六维力传感器是机器人力控解决方案中应用最广泛的传感器之一,其性能更好,成本也相对较高。通过使用六维力....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-08 17:54
•2402次阅读
搭建机器人关节力控制系统需要以下步骤: 1. 选择合适的电机和传感器。电机的选取要符合机器人的要求,....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-08 17:45
•1969次阅读
力触觉感知系统在机器人操作中具有非常重要的作用。它可以检测机器人末端执行器与工件相互作用时产生的三维....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-08 17:37
•1570次阅读
力控机器人是一种能够感知力量并具有实时控制能力的机器人系统。 它们可以在与人类进行精准协作和合作时,....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-08 17:25
•2160次阅读
JIT Trace torch.jit.trace使用eager model和一个dummy inp....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-08 17:08
•1663次阅读
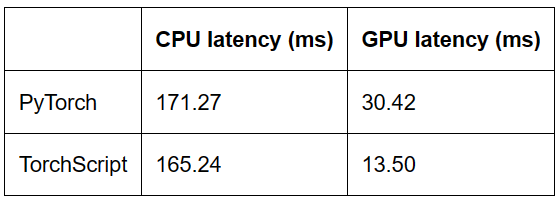
PyTorch支持两种模式:eager模式和script模式。eager模式主要用于模型的编写、训练....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-08 16:56
•1435次阅读
机器人关节力矩传感器的分辨力是指其输出信号能够区分的最小力矩值。 一般来说,分辨力越高的传感器能够感....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-08 16:47
•2154次阅读
机器人力矩传感器原理: 在扭矩传感器中,通常会使用一种称为应变片的元件来检测弹性变形。 应变片是一种....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-08 16:41
•2264次阅读
限制机器人力控性能的因素有很多,以下是一些主要的因素: 1. 力觉传感器性能:力觉传感器是机器人力控....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-08 16:33
•1919次阅读
在机器人的操作任务中,处理机器人和环境之间的物理接触是非常重要的。 由于机器人系统的复杂性和不确定性....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-08 16:18
•2027次阅读
(1)gicv2的寄存器 gicv2寄存器,都是使用memory-mapped的方式去访问的 • ◾....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-08 16:09
•1864次阅读
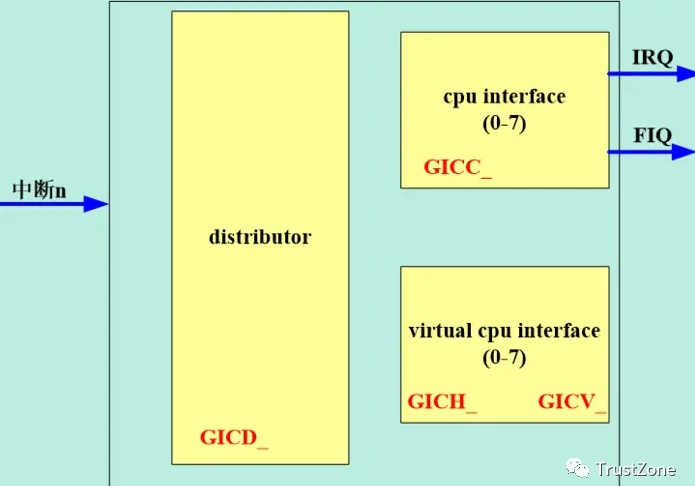
(1)gicv2的组件 在GICv2中,最大支持8个core • distributor:实现中断分....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-08 15:57
•1237次阅读
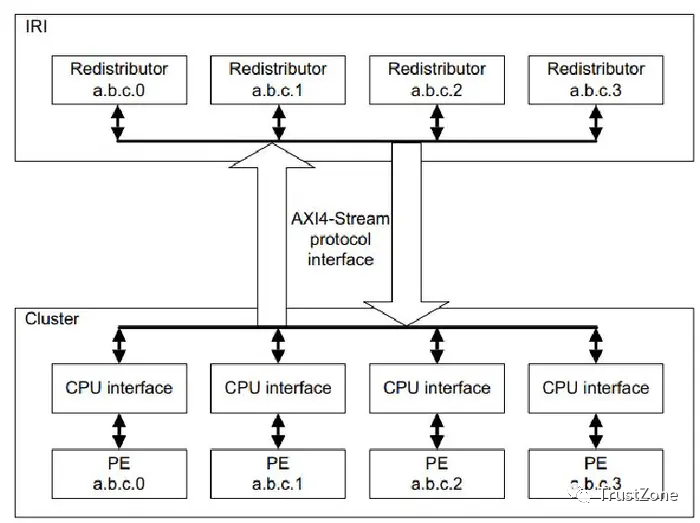
(1)gicv2和ARM Core的连接 ARM cortex-A系列处理器,提供了4个管脚给soc....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-07 18:07
•1423次阅读
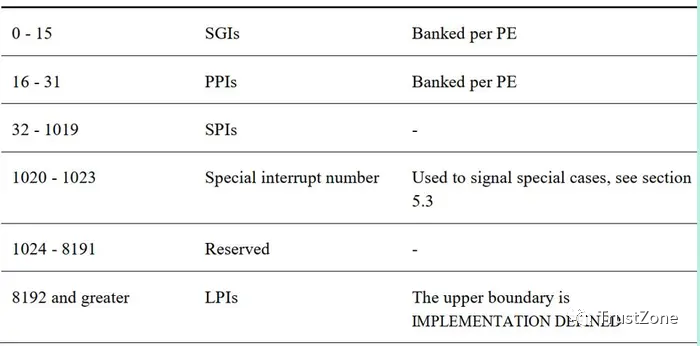
(1)中断的分类、分组 1-中断触发方式 • ◾edge-triggered: 边沿触发,当中断源产....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-07 18:01
•1718次阅读