 智能车方向控制舵机PWM技术
智能车方向控制舵机PWM技术

舵机
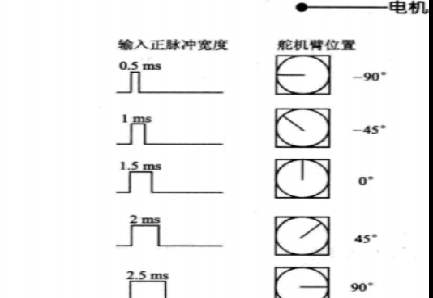
舵机是一种位置(角度)伺服的驱动器,我们可以通过给信号脚不同的占空比来让舵机进行打角进而控制小车方向。
例如C车的S3010舵机,它需要使用周期20ms(50Hz)的PWM驱动,高电平时间和舵机打角的对应关系如下:
PWM技术
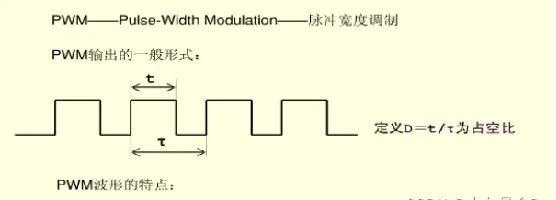
这里补充一下PWM技术,我们常说的PWM可以理解为一组方波,其周期就是两个相邻的上升沿或者两个相邻下降沿的时间,上述舵机使用的就是一个周期为20毫秒的PWM驱动;而占空比就是在一个周期内高电平的时间。
PWM技术简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在测量、通信、工控等方面。
PWM的频率:
是指在1秒钟内,信号从高电平到低电平再回到高电平的次数,也就是说一秒钟PWM有多少个周期,单位Hz。
PWM的周期:
T=1/f,T是周期,f是频率。
如果频率为50Hz ,也就是说一个周期是20ms,那么一秒钟就有 50次PWM周期。
占空比:
是一个脉冲周期内,高电平的时间与整个周期时间的比例,单位是% (0%-100%)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
PWM
+关注
关注
116文章
5912浏览量
227272 -
智能车
+关注
关注
21文章
413浏览量
78644 -
舵机
+关注
关注
17文章
380浏览量
43456
发布评论请先 登录
相关推荐
热点推荐
飞思卡尔智能车制作全过程
飞思卡尔智能车制作全过程 本人在很久以前做的一辆用来比赛的智能车--获得华北一等奖,全国二等奖,有许多可改进地方,下面我们来立即开始我们的智能车制作之旅。 首先,一个系统中,传感器至关重要:不管
发表于 05-18 14:14
智能车系统解决方案总体设计
大神提出改善的建议。资料在闯客网技术论坛下载 整个系统分为悬停半空的摄像头识别系统和地面的智能车控制系统,这两个系统均采用MKL26Z256VLL4作为核心控制单元。半空中的识别系统通
发表于 10-24 19:17
基于红外传感技术的STM32智能车
设计一种集红外遥控、 黑线循迹、自动泊车、车速检测、行驶路程显示等功能于一体的智能车。主要使用了红外传感技术,并结合 STM32F103 系列芯片,模拟现代新型汽车的自动驾驶功能。 采用槽型对射光电
发表于 02-28 20:07
电磁循迹智能车是由哪些模块组成的
我的第一辆智能车—电磁循迹智能车以下是所用的模块:舵机,电机,L298N驱动模块,PID算法,OLED,电磁杆,ADC多路采集配置DMA,干簧管,普通GPIO口使用。1.舵机模块
发表于 01-14 09:08
双舵机模糊控制在智能车控制中的应用介绍
,如何让智能车在不同形状的赛道上进行平稳 、快速的切换,实现路径的最优控制,是转向控制的一个关键问题 目前,转向控制的物理实现普遍采用的是用一个舵机
发表于 09-19 08:03
飞思卡尔智能车舵机和测速的控制设计与实现
“飞思卡尔”杯全国大学生智能汽车竞赛要求车模行驶“稳”、“准”、“快”。通过优化智能车系统中舵机安装,利用霍尔传感器控制测速,车模在不同赛道都能够适应新赛道,
发表于 02-11 12:13
•237次下载




评论