 浅谈智能车的直流调速系统
浅谈智能车的直流调速系统

直流电动机的稳态转速方程可以表示为:
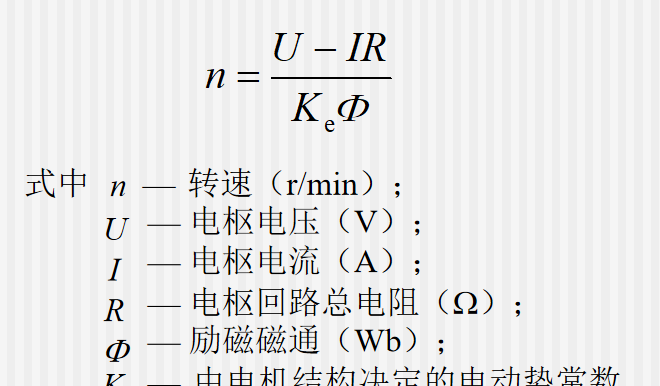
根据上式,从数学的角度可以得知,直流电机有三种调节转速的方法:
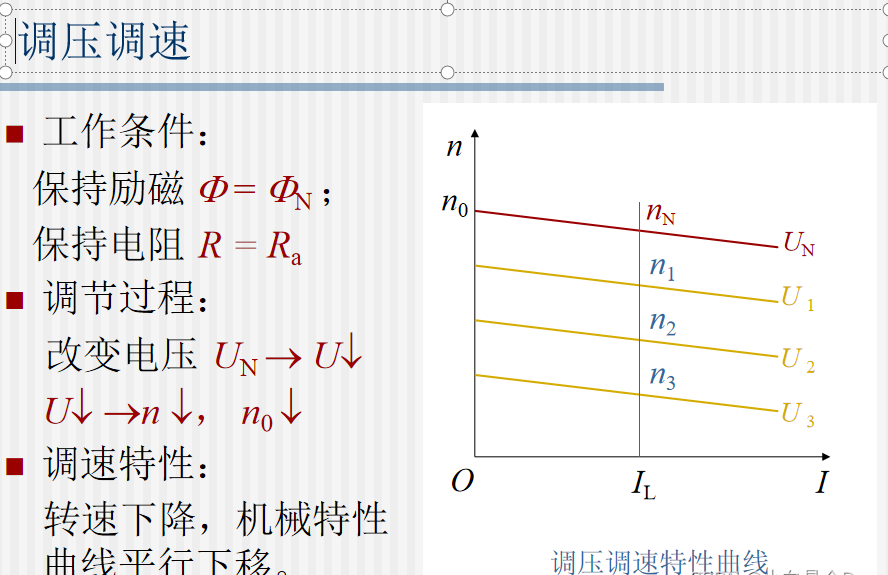
(1)调节电枢供电电压 U。
(2)减弱励磁磁通 φ。
(3)改变电枢回路电阻 R。
由于智能车比赛中的电机已经指定了,那么方法2,3显然不可取,剩下的就是方法1了,所以智能车的速度控制都是采取的变压调速。
桥式可逆PWM变换器
这个直流调速系统知识点很多,因为智能车中几乎都是运用的PWM加全桥,因此此处仅解析桥式可逆PWM变换器。
可逆PWM变换器主电路有多种形式,最常用的是桥式(亦称H形)电路如下图所示:
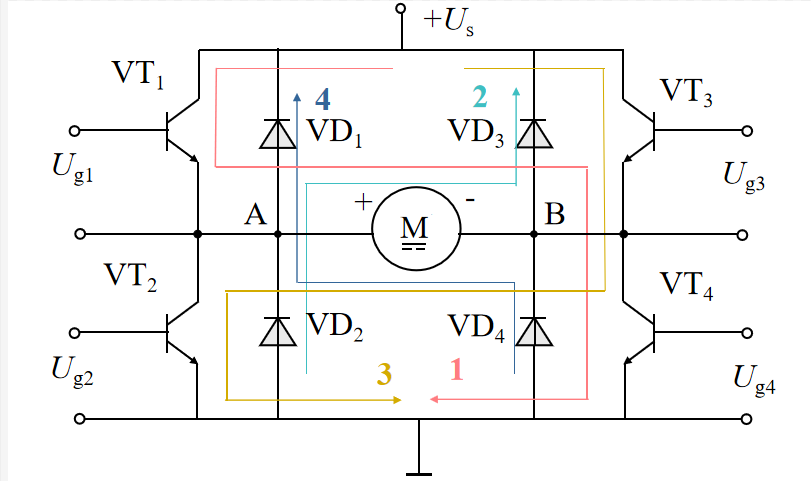
电动机M两端电压的极性随开关器件栅极驱动电压极性的变化而改变,其控制方式有双极式、单极式、受限单极式等多种,这里分析双极式控制的可逆PWM变换器,需要注意的是智能车中多使用的是单极性控制,大致过程与双极性相似。
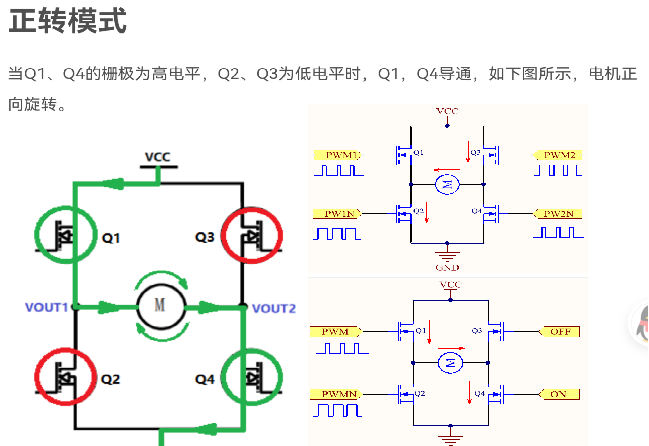
(1)正向运行
第1阶段,在 0 ≤ t ≤ ton 期间, Ug1 、 Ug4为正, VT1 、 VT4导通, Ug2 、 Ug3为负,VT2 、 VT3截止,电流id 沿回路1流通,电动机M两端电压UAB = +Us ;
第2阶段,在ton ≤ t ≤ T期间, Ug1 、 Ug4为负, VT1 、 VT4截止, VD2 、 VD3续流, 并钳位使VT2 、VT3保持截止,电流 id 沿回路2流通,电动机M两端电压UAB = –Us ;
(2)反向运行
第1阶段,在 0 ≤ t ≤ ton 期间, Ug2 、 Ug3为负,VT2 、 VT3截止, VD1 、 VD4 续流,并钳位使 VT1 、VT4截止,电流 –id 沿回路4流通,电动机M两端电压UAB = +Us ;
第2阶段,在ton ≤ t ≤ T 期间, Ug2 、 Ug3 为正, VT2 、 VT3导通, Ug1 、 Ug4为负,使VT1 、VT4保持截止,电流 – id 沿回路3流通,电动机M两端电压UAB = – Us ;
-
电机控制
+关注
关注
3601文章
2173浏览量
279039 -
直流电机
+关注
关注
36文章
1785浏览量
74237 -
PWM
+关注
关注
116文章
5894浏览量
226566 -
智能车
+关注
关注
21文章
412浏览量
78578
发布评论请先 登录
智能车设计基础
树莓派智能车AlphaBot系列教程
智能车系统解决方案总体设计
基于光电管路径识别的智能车系统设计
智能车直流电机的设计及多种方案比较(电路图、调速源代码)
第十五届智能车入门浅谈 精选资料分享
基于单片机的智能车设计
智能车竞赛浅谈——图像篇
基于光电管路径识别的智能车系统设计

飞思卡尔智能车控制系统设计




评论