 机器人里程计数据的上传与接收
机器人里程计数据的上传与接收

1.通信协议
里程计数据格式(19字节)

2.STM32端
/**
* @brief 发送里程计数据
*/
void DataTrans_Odom(void)
{
uint8_t _cnt = 0;
data_u _temp; // 声明一个联合体实例,使用它将待发送数据转换为字节数组
uint8_t data_to_send[100] = {0}; // 待发送的字节数组
data_to_send[_cnt++]=0xAA;
data_to_send[_cnt++]=0x55;
uint8_t _start = _cnt;
float datas[] = {kinematics.odom.vel.linear_x,
kinematics.odom.vel.linear_y,
kinematics.odom.vel.angular_z,
kinematics.odom.pose.theta
};
for(int i = 0; i < sizeof(datas) / sizeof(float); i++)
{
// 将要发送的数据赋值给联合体的float成员
// 相应的就能更改字节数组成员的值
_temp.data = datas[i];
data_to_send[_cnt++]=_temp.data8[0];
data_to_send[_cnt++]=_temp.data8[1];
data_to_send[_cnt++]=_temp.data8[2];
data_to_send[_cnt++]=_temp.data8[3]; // 最高位
}
uint8_t checkout = 0;
for(int i = _start; i < _cnt; i++)
{
checkout += data_to_send[i];
}
data_to_send[_cnt++] = checkout;
// 串口发送
SendData(data_to_send, _cnt);
}
3.ROS端
采用状态机的方式来接收STM32端上传的里程计数据,每读取一字节数据,则在状态机中处理一次,部分程序如下:
uint8_t buffer = 0;
ser.read(&buffer, 1); // ser是串口类的一个实例,该语句表示从串口中读取一个字节
if(state == 0 && buffer == 0xAA)
{
state++;
}
else if(state == 1 && buffer == 0x55)
{
state++;
}
else if(state == 2)
{
data_receive[data_cnt++]=buffer;
if(data_cnt == 17)
{
/* 进行数据校验 */
uint8_t checkout = 0;
for(int k = 0; k < data_cnt - 1; k++)
{
checkout += data_receive[k];
}
if(checkout == data_receive[data_cnt - 1]) // 串口接收到的最后一个字节是校验码
{
/* 校验通过,进行解码 */
float vx, vy, vth, th; // x轴线速度,y轴线速度,z轴角速度,偏航角
float* datas_ptr[] = {&vx, &vy, &vth, &th};
data_u temp;
for(int i = 0; i < sizeof(datas_ptr) / sizeof(float*); i++)
{
temp.data8[0] = data_receive[4 * i + 0];
temp.data8[1] = data_receive[4 * i + 1];
temp.data8[2] = data_receive[4 * i + 2];
temp.data8[3] = data_receive[4 * i + 3];
*(datas_ptr[i]) = temp.data;
}
th *= D2R; // 转换为弧度
}
data_cnt = 0;
state = 0;
}
}
else state = 0;
ROS端在运行时可能会提示串口打开失败,有两种原因,一是串口号不对,使用dmesg | grep ttyS*列出检测到的串口号,逐个测试;
二是没有操作权限,使用sudo chmod 666 /dev/ttyACM0即可解决,也可以使用sudo usermod -aG dialout 用户名来获得永久权限,用户名可使用whoami查看。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
30580浏览量
219578 -
数据
+关注
关注
8文章
7314浏览量
93982 -
STM32
+关注
关注
2305文章
11120浏览量
371159 -
ROS
+关注
关注
1文章
290浏览量
18474
发布评论请先 登录
相关推荐
热点推荐
深度解析|机器人自主移动的秘密(二)
消耗是巨大的,虽然并没有达到像训练神经网络动用服务器集群那种地步,但传统上需要PC级别的处理器。除配备激光雷达外,还需要机器人具有IMU(惯性测量单元)、里程计来为激光雷达提供辅助数据,否则SLAM系统
发表于 06-30 15:05
关于机器人定位与建图,这些小技巧你懂吗
说到机器人自主定位导航解决方案及技术,大家脑海里肯定会浮现“定位”、“建图”、“避障”、“路径规划”等字眼。定位 在思岚提供的自主定位导航解决方案中,主要是通过雷达和里程计的数据来进行定位。虽然
发表于 03-28 15:48
机器人视觉系统组成及定位算法分析
,这些眼睛亦可称为VO(视觉里程计:单目or立体),维基百科给出的介绍:在机器人和计算机视觉问题中,视觉里程计就是一个通过分析处理相关图像序列来确定机器人的位置和姿态。当今,由于数字图
发表于 06-08 08:30
如何去实现一种送餐机器人产品设计
漂移,环境中移动物体过多时容易出错UWB定位误差十几厘米,信号容易遮挡视觉二维码 + 轮子里程计对比后最优方案是 视觉二维码+轮子里程计基于二维码+轮子里程计方法,主要的传感器数据来源
发表于 11-11 07:10
设计一个能自由行走并且可以与人语音对话机器人的设计资料分享
机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光雷达、IMU、轮式里程计、麦克风、音响、摄像头,和用于处理信息的嵌入式主板。关于传感器的ROS驱动程序开发和在机器人上的使用在后面的章节会展开,...
发表于 12-17 06:58
基于全景视觉与里程计的移动机器人自定位方法
通过分析全景视觉与里程计传感器的感知模型的不确定性,提出了一种基于路标观测的 移动机器人 自定位算法. 该算法利用卡尔曼滤波器,融合多种传感器在不同观测点获取的观测数据完
发表于 06-28 10:58
•41次下载

视觉里程计的详细介绍和算法过程
在导航系统中,里程计(odometry)是一种利用致动器的移动数据来估算机器人位置随时间改变量的方法。例如,测量轮子转动的旋转编码器设备。里程计总是会遇到精度问题,例如轮子的打滑就会导
轮式移动机器人里程计分析
但凡涉及到可移动的机器人的导航系统,大概率会涉及到里程计的计算,比如轮式移动机器人、无人机、无人艇,以及多足机器人等,而计算里程计的方案也有
介绍一种基于编码器合成里程计的方案
摘要:本文主要分析轮式移动机器人的通用里程计模型,并以两轮差速驱动机器人的里程计计算为案例,给出简化后的两轮差速驱动机器人
ROS机器人导航调参手册
在 ROS 中,我们可以输出带有时间戳的里程计数据,然后看机器人达到恒定的最大平移速度(ti)需要多长时间,然后使用来自里程计数据(nav_msgs/Odometry message)来计算这个过程的加速度。多做几次实验求平均值

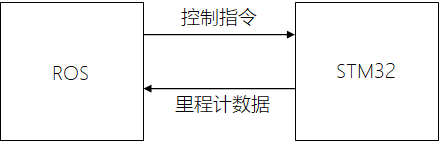
ROS与移动底盘的通信试验内容
ROS与STM32的通信流程如图所示 主要包含两个方面: 小车里程计数据的上传与接收 控制指令的下发与接收 1.原始消息内容 在ROS中,里程计数据
机器人里程计数据可视化
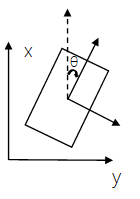
STM32端返回的x轴线速度、y轴线速度是相对于自身的机体坐标系的速度,而机器人的位置信息是相对于世界坐标系的位置,所以在对速度进行积分前, 要先将机体坐标系下的x轴线速度、y轴线速度转换到世界坐标





 工商网监
工商网监
评论