 CBS多机器人路径规划实例讲解
CBS多机器人路径规划实例讲解

实例讲解
以下将通过一个简单的实例讲解CBS的基本过程,实例如图2所示。
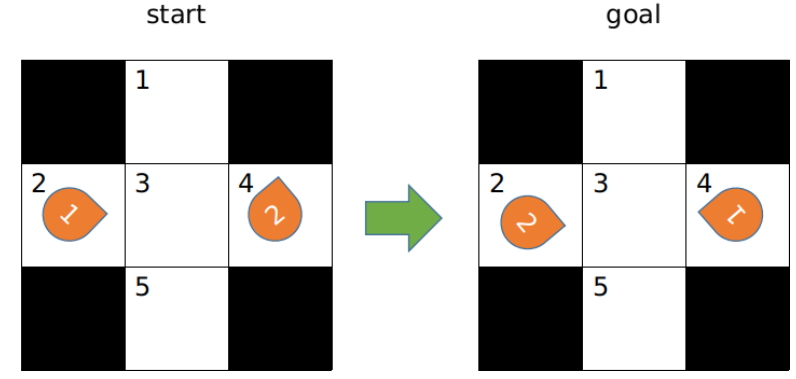
图2 初始和目标状态
CBS的搜索过程如图3所示。

图3 CBS搜索过程
CBS开始时没有冲突约束,每个机器人按照各自的路径规划,得到节点1所示的路径结果,由于路径产生冲突,需要生成新的分支(节点2和节点3),节点2添加冲突为:1号在1时刻(从0时刻开始)不进入位置3,节点3添加冲突为:2号在1时刻不进入位置3。
在约束的作用下进行低层次的搜索,节点2和节点3都搜索到了路径,但发生了新的冲突,由于节点2和节点3的代价值相等,可以从左边的节点(节点2)开始生成新的分支:节点4和节点5,然后对节点4和节点5进行低层次的搜索得到路径,最终节点5得到有效路径,搜索过程可以结束。
待改进的地方
虽然CBS做为一个比较优秀的多机器人路径规划器,依然存在一些缺点影响它在实际中的应用。
1.当环境拥挤,机器人数目多时,计算时间比较长,甚至无解;
2.无法判断有些情况是否无解,导致程序无法结束运行,且一直消耗系统内存;
3.实际情况下,机器人需要原地旋转、有加减速度、运行存在误差,需要后续进一步处理才能在实际中运行;
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
215文章
31782浏览量
224943 -
程序
+关注
关注
117文章
3849浏览量
85746 -
路径
+关注
关注
0文章
50浏览量
12807
发布评论请先 登录
相关推荐
热点推荐
labview仿真问题,机器人路径规划
我现在做这个机器人的路径规划,有一个人工势场的算法,已经用C实现算法,请问一下能否用这个labview仿真,就是给定一些起始点,终点,还有这个障碍物的坐标,中间是这个算法计算出来的一些点,能够在执行算法的时候用labview描出
发表于 04-22 16:04
深度解析|机器人自主移动的秘密(三)
SLAM实现到扫地机器人所需要的这些功能,还是有非常多的工作要做的。针对扫地机器人,我们将其特有的路径规划功能预先内置在SLAMWARE中,
发表于 08-01 13:50
SLAM不等于机器人自主定位导航
和即时定位问题,而自主导航需要解决的是智能移动机器人与环境进行自主交互,尤其是点到点自主移动的问题,这需要更多的技术支持。 要想解决机器人智能移动这个问题,除了要有SLAM技术之外,还需要加入路径
发表于 08-24 16:56
基于多传感器信息融合的移动机器人的路径规划
移动机器人是机器人技术的一个重要领域,是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。动态未知环境下的移动机器人路径
发表于 07-17 09:22
•18次下载
狭隘环境下一种多机器人路径规划方法
狭隘环境下多机器人路径规划使用共享资源时,极易产生冲突,优先顺序化是解决共享资源冲突的一个重要技术。本文提出了一种基于学习分类器的动态分配优先权的方法,提高
发表于 01-08 14:35
•0次下载
移动机器人路径规划的实现
近年来,移动机器人的研究受到了人们的高度重视,人们对于机器人的要求不再局限于简单的移动,而是希望机器人能够根据周围环境变化采取对应措施,做到自主移动的能力。因此,路径
机器人路径规划算法,全局路径规划与局部路径规划究竟有哪些区别
路径规划是移动机器人导航最基本的环节,指的是机器人在有障碍物的工作环境中,如何找到一条从起点到终点适当的运动路径,使




评论