 IMU/GNSS与车体外参标定
IMU/GNSS与车体外参标定

作为无人车以及智能机器人而言,在装配过程中各个传感器之间的外参标定一直是比较头疼的问题。这里作者也系统的学习了一下,传感器的外参标定和在线标定问题。
下图是我们常用的几个坐标系,而对于常用的外参问题经常是IMU/GNSS与车体坐标的外参、Lidar和Camera的外参、Lidar和Lidar的外参、Lidar和IMU/GNSS的外参。

- 离线外参标定
1.1 IMU/GNSS与车体外参标定
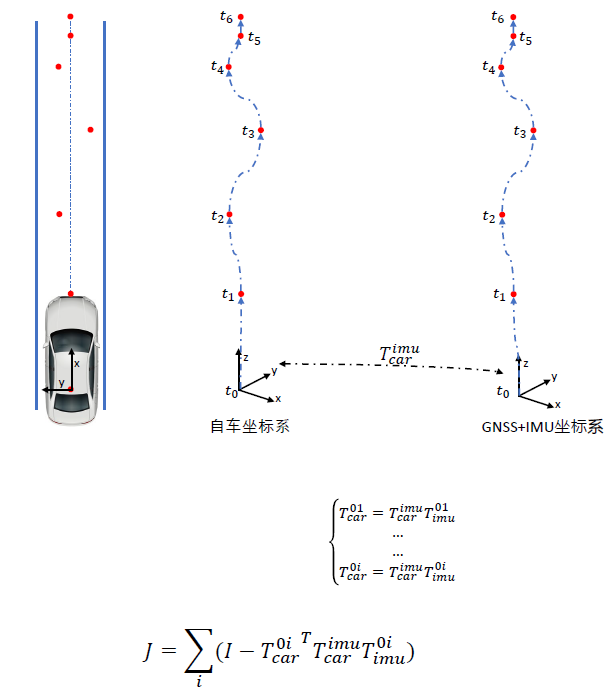
这个IMU/GNSS与车体外参标定如下图所示,主要需要获取**T_{car}^{imu}**坐标系,这一类IMU/GNSS设备通过内部的紧耦合可以综合输出一系列校准后的位姿信息。
同时IMU的输出频率是很高的,所以通过插值的形式可以有效地提高整体综合的频率输出。
为了去标定外参,一般的方法是获取位姿运动的位姿序列,并通过GNSS/IMU来观测车辆自身的运动(有的时候我们可以通过绕圈的形式+手持点测绘来对车辆自身坐标和GNSS坐标进行匹配计算)。
通过获取很多个观测和gnss的转换可以得到cost fuction参与到里面去优化。
这里我们也给出了基于车体坐标系odom和IMU的位姿联合矫正的相关代码,考虑到IMU和轮速计的数据收集过程中本身在时间上就很难做到完全对齐,此时引入时间偏移(delta_t)用于表示两者采集时间片之间的误差,通过循环标定新产生的轮速计数据和原先的IMU
数据,选取误差最小的结果作为最终两者之间的标定,相应的(delta_t)即认为两者采集时间的偏差。
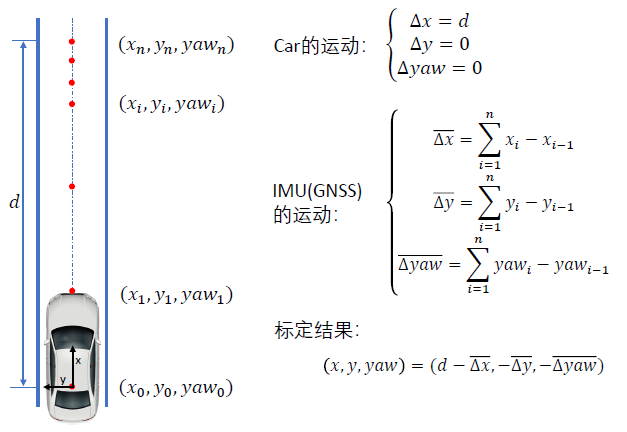
其实作为车辆来说,在平面测量后,其实只需要观测x,y,yaw即可。所以可以将用直线来做约束和校准,得到下图的公式:

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
检测
+关注
关注
5文章
4965浏览量
94377 -
GNSS
+关注
关注
9文章
1026浏览量
51469 -
IMU
+关注
关注
6文章
434浏览量
48158
发布评论请先 登录
相关推荐
热点推荐
IMU+多相机高速联合自动标定方案
随着视觉惯性传感器在自动驾驶、机器人、AR/VR 等领域规模化落地,多相机+IMU 联合标定需求呈爆发式增长,多相机+IMU 联合标定领域尚属空白。
感算商城联合知名方案公司推出国
发表于 10-23 14:04

3DM-GX5-15 惯性测试单元IMU
3DM-GX5-15 惯性测试单元IMU3DM-GX5-15 惯性测试单元IMU 3DM-GX5-15 惯性测试单元IMU 详询请致电:***工作q:11398788543DM-GX5-15】
发表于 12-07 09:05
IMU 3DM-GX5-25
惯性传感器,所有产品重量不超过20g,且体积小巧,功耗低,能够稳定的为客户输出各种类别的工业级惯性参数。该系列目前有组合惯导(GNSS/INS),航姿参考(AHRS),惯性测量单元(IMU),广泛应用
发表于 12-16 14:18
IMU误差来源/表达式/标定
\omegakω,c ω c_\omegacω分别表示加速度计与陀螺仪的温漂系数。三、IMU标定在SLAM领域中,单纯的视觉传感器在现阶段无法通过计算机视觉完成精确的位姿计算,一般采用imu作为补充,进行多
发表于 12-24 15:56
基于CP-132UL V2的标定测试软件实现完成对IMU的标定工作
针对IMU的野外测试环境限制,需改进其测试方法,则需用新的硬件采集电路实现。根据实际需要,在CP-132ULV2数据采集板的基础上,采用VC6.0设计了针对野外测试环境所需的测试软件,从而实现在恶劣环境下完成对IMU的标定工作。
发表于 08-13 15:19
•1723次阅读
GNSS+IMU+MM车载高精度组合导航定位系统对比分析
干扰,导致GNSS无定位结果或定位精度差。这是“有源定位”固有的缺点,无法从算法上来克服。针对这个问题,以GNSS+IMU等多传感器融合方案越来越受到重视,因为“无源定位”的IMU恰好可以弥补卫星定位的短板。 1.基础原理 导航

GNSS+IMU+MM车载组合导航系统解决方案
GNSS无定位结果或定位精度差。这是“有源定位”固有的缺点,无法从算法上来克服。针对这个问题,以GNSS+IMU等多传感器融合方案越来越受到重视,因为“无源定位”的IMU恰好可以弥补卫星定位的短板。
发表于 09-17 14:40
•2686次阅读
激光雷达相机外参标定相关内容
来自CMU Robotics Institute, 已知最早3D Laser与相机标定的工作(2005年),基于matlab的图形用户界面,进行激光雷达相机外参标定。

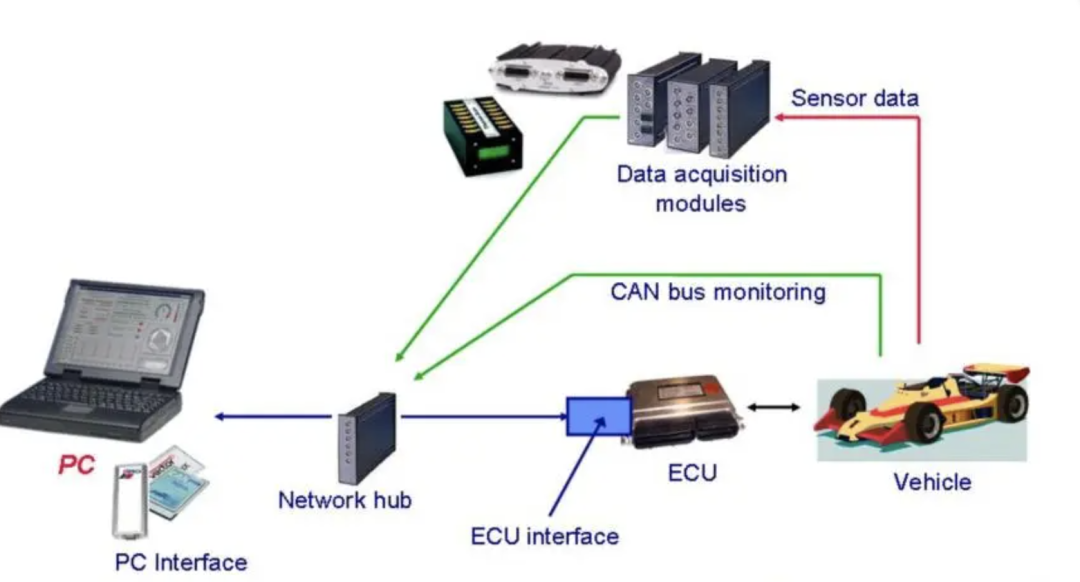
车辆中的标定概述
标定概述 我们先看一张图,做过调试的同学额应该很熟悉,出问题了,要实车调试,我们带着电脑和canoe下去调试了。只不过这张图是讲标定的,我们通过can或者以太网接口卡,把标定参数刷到我的Ecu中
汽车电子激光雷达和相机的自动在线外参标定技术
为了解决外参逐渐漂移的问题,提出了一种基于线的方法,可以在真实场景中实现激光雷达和相机的自动在线外参标定。首先,从点云和图像中提取和过滤线特征。然后,利用自适应优化方法提供精确的外部参数。然后在KITTI基准上用地面真值对其进行
发表于 08-31 10:50
•2096次阅读

浅析传感器的外参标定和在线标定问题
作为无人车以及智能机器人而言,在装配过程中各个传感器之间的外参标定一直是比较头疼的问题。这里作者也系统的学习了一下,传感器的外参标定和在线标定
发表于 11-20 15:45
•2013次阅读

压电纳米旋转台用于高精度IMU的出厂标定
中最关键的一道工序:出厂标定。当IMU标定需求迈入微弧度时代,压电纳米旋转台凭借独特技术优势,成为标定场景的理想搭档。 (注:图片源于网络) 一、I



评论