 智能车控制器功能介绍
智能车控制器功能介绍

以简单的智能车为例,一般会存在两个控制器,一个是运行ROS的主控,另一个是运行电机控制和传感器信息采集的单片机比如STM32。
由于存在多个控制器,完成一个机器人的具体任务,那么这多个控制器间则需要建立通信,本篇博客主要讲解:
- 如何实现ROS主控和STM32之间的通信
- ROS主控对STM32发送过来的数据做哪些处理
以智能车的应用例程展开
智能车控制器功能
在智能车里存在两个控制器:
- ROS主控
- STM32控制器
只要能将ROS跑起来就可以作为ROS主控,ROS主控可以是:
- jetson
系列,例如 nano、tx、nx - 树莓派
- 工控机
在智能车里,ROS主控主要实现的功能有:
- 雷达信息采集
- 摄像头信息采集
- 路径规划
- 定位
STM32
控制器主要实现的功能有:
通信内容
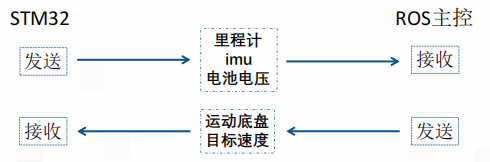
ROS主控负责接收stm32发送过来的传感器数据
数据有里程计、imu、电池电压。其中里程计就是电机的转速,通过编码器采集到。
STM32负责接收ROS主控发送过来的运动底盘的目标速度,STM32再完成电机转速的控制,最终实现小车的移动任务
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
114文章
17879浏览量
195159 -
机器人
+关注
关注
213文章
31455浏览量
223688 -
STM32
+关注
关注
2313文章
11195浏览量
374671 -
智能车
+关注
关注
21文章
412浏览量
78583 -
ROS
+关注
关注
1文章
296浏览量
18869
发布评论请先 登录
相关推荐
热点推荐
智能车设计基础
智能车设计基础 第10章.rar http://filemarkets.com/file/bai2471/9d9e6c95/智能车设计基础 第3章.rar: http://www.t00y.com
发表于 10-21 21:11
实时监控防火智能车
的功能吧:基于51单片机,利用火焰感应、温度传感、GSM、寻迹和驱动等多个模块,实现对仓库或有毒易燃物品的无人化二十四小时监控,更灵敏更经济。可以实现智能车在闭环控制以及接受智能车对于
发表于 04-29 00:11
树莓派智能车AlphaBot系列教程
;catid=57树莓派智能车AlphaBot教程1:人生若只如初见 ...树莓派智能车AlphaBot教程2:直流电机控制 ... 树莓派智能车AlphaBot教程3:避障树莓派
发表于 05-15 15:39
智能车系统解决方案总体设计
大神提出改善的建议。资料在闯客网技术论坛下载 整个系统分为悬停半空的摄像头识别系统和地面的智能车控制系统,这两个系统均采用MKL26Z256VLL4作为核心控制单元。半空中的识别系统通过模拟摄像头
发表于 10-24 19:17
基于光电管路径识别的智能车系统设计
的舵机驱动前轮转向,使用符合PI算法的控制器实现直流电机的调速。为了使智能车快速、平稳地行驶,系统必须把路径识别、相应的转向伺服电机控制以及直流驱动电机控制准确地结合在一起。 1 硬
发表于 11-06 15:08
基于红外传感技术的STM32智能车
设计一种集红外遥控、 黑线循迹、自动泊车、车速检测、行驶路程显示等功能于一体的智能车。主要使用了红外传感技术,并结合 STM32F103 系列芯片,模拟现代新型汽车的自动驾驶功能。 采用槽型对射光电传感
发表于 02-28 20:07
怎样去设计一款完整的智能车
的无人驾驶技术来的那么复杂,但是也需要相应的传感器、执行器、控制器以及硬件电路并进行控制算法的设计与调试等。一般需要数月才能较为系统地掌握上述知识,而能熟练应用并进行系统化调试以及创新
发表于 07-29 06:00
双舵机模糊控制在智能车控制中的应用介绍
,如何让智能车在不同形状的赛道上进行平稳 、快速的切换,实现路径的最优控制,是转向控制的一个关键问题 目前,转向控制的物理实现普遍采用的是用一个舵机作为前轮的转向
发表于 09-19 08:03
基于路径识别的智能车系统设计
介绍了一种基于光电管路径识别的智能车系统。该智能车使用光电管作为路径识别装置,依靠舵机辅助智能车转向,使用直流电机驱动智能车前进。系统采用符
发表于 07-06 16:57
•73次下载
MC9S12XSl28微控制器的智能车硬件设计
MC9S12XSl28微控制器的智能车硬件设计
以“飞思卡尔”杯智能车大赛为研究背景,采用MC9S12XSl28作为核心处理器,通过对比各个模块不同设计方案的性能,完成
发表于 04-12 15:28
•2499次阅读
基于光电管路径识别的智能车系统设计
介绍了一种基于光电管路径识别的智能车系统。该智能车使用光电管作为路径识别装置,依靠舵机辅助智能车转向,使用直流电机驱动智能车前进。系统采用符
发表于 06-09 09:56
•3481次阅读

智能车控制器功能有哪些
以简单的智能车为例,一般会存在两个控制器,一个是运行ROS的主控,另一个是运行电机控制和传感器信息采集的单片机比如STM32。 以智能车的应




评论