良好格式的XML文档必须有一个根元素,就是紧接着声明后面建立的第一个元素,其他元素都是这个根元素的子....
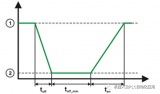
循环时间为46小时。 当驱动器控制了总共46个小时后,它就失效了。 然后,机器人控制器请求进行制动测....
该变量最多可用于编程6个函数发生器。函数发生器仅对CP运动有效。仅评估主运行变量。
可以在机器人程....

这个清单里的实体,如果和美国企业做进出口贸易,要取得美国商务部批准,包括硬件和软件。MATLAB 被....
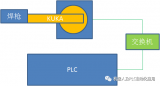
ETHERNETKRL用于视觉抓取和PC通讯的大数据量数据快速交换!采用报文形式连接,机器人使用XM....
主回路输入三相交流电压后,由三相全波桥式整流,再经电容滤波后得到500V左右的直流电压,最后由SPW....
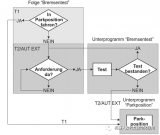
机器人在执行焊道位置示教程序时,当机器人运行到焊道轨迹点时,通过KUKA 用户程序记录焊道的程序号,....
其可以是部门主管明确部门的主要责任,并以它为基础,来明确部门人员的业绩衡量指标。做好绩效管理的关键是....
EtherCAT(以太网控制自动化技术)是一个开放架构,以以太网为基础的现场总线系统,其名称的CAT....

IF(PRO_NAME1_L[1]=="C") AND (PRO_NAME1_L[2]=="E") ....

零点标定可通过确定轴的机械零点的方式进行。在此过程中轴将一直运动,直至达到机械零点为止。这种情况出现....

FB41用于通过使用连续的变量输出在SIMATIC S7控制系统中实现技术过程控制。除了设定点操作和....

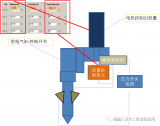
螺柱焊设备是大量应用于整车生产的常用装备.通常与机器人配合使用,也有部分手动螺柱焊设备.
附加负载数据必须输入机器人控制系统。必要的数据包括:
n 质量 (m),单位:kg
n 物体重心....

SetValueSmartTags("@StandardSPS_InfoGrund_DB.Stell....

If (R_TRIG_SK90_ZutrittAnfo.Q Or F_TRIG_K90_Zutrit....
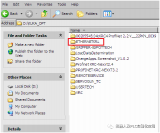
VW_Basic_8_3_20.kop文件用于使用软件版本VSS8.3.20#384的KUKA机器人....

通过 XML 文件配置以太网连接。针对每个连接,必须在机器人控制系统的目录 C:KRCROBOTER....
一轴可以为任意位置,A2 = -90 度,A3 = 90 度,A4 = 0度,A5 = 0度,....

将$APP_INT[5]的值由 当前停止的值改为1,STEP会先返回到第1步再去第2步。不需要专家盘....
![$APP_INT[5]与固定焊钳MAKROSTEP的使用](https://file.elecfans.com/web1/M00/C0/16/pIYBAF768g6AbTUOAABT9ZWMBiY416.png)
FB 202DB块输出机器人,采用该模块,可将机器人结构中的数据拷贝至机器人输入数据区。
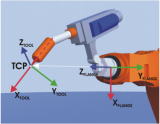
通过一个固定参考点的工具坐标系的测量分为2步:首先确定工具坐标系的TCP点,然后确定工具坐标系的姿态....
原因: 比例阀损坏,螺旋胶枪的的气流返回不畅通,或者反馈电信号不稳定,会引起此类故障
循环初始化必须在瓶盖铣削之后进行,使用在WorkVisual中在初始化力盖下配置的力。

ProConOS是一款高性能PLC运行时间引擎,专为基于嵌入式和PC的控制应用而设计。ProConO....

如果生产歇工很短,为了使用状态驱动总线关闭,则可以用状态制动器已制动节能。但是,只有在机器人控制系统....
例如:对一辆汽车而言,发动机功率或里程数为整数型。对价格而言,实数型最适用。而空调设备的存在则与此相....


