KUKA工具之CZ电伺服铆钳ECKOLD技术
通过ECKOLD软件(通过客户提供的系统,在现有工业PC上)进行过程监视和控制的可视化.


生降位的电机控制-SEW-MOVIPRO
•X5520-STO安全点直接控制变频器的功率单元以及抱闸的控制单元,接通后使抱闸和电机可以控制。
$DSECHANNEL数字伺服系统轴通道的分配
可以在此处配置以下机器数据:1.外部轴数或运动系统中的轴数
2.刹车控制方式



KUKAC4机器人电机风扇故障,使得机器人没有好使能.
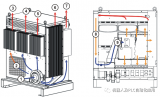
箱柜冷却装置包含两条冷却循环回路。装有控制、功率电子元器件的箱内范围通过一个换热器进行散热。在箱柜的....


C4机器人与PLC的通信IO域更改扩展
在全自动化生产线上,必须对过程进行监控和协调,例如状态监测和过程控制。这个任务通常由 PLC 来承担....


变频器电路由主电路和控制电路组成
1、交-直-交变频器是现在最常使用的变频器,按直流环节的储能方式分为电压型变频器、电流型变频器,按输....
限制电动机启动电流的要求是什么?
当负载对电动机启动力矩无严格要求又要限制电动机启动电流,电机满足380V/Δ接线条件,电机正常运行时....
关于EtherCAT的性能
1000 个I/O 的更新时间只需30 µs,其中还包括I/O 周期时间。单个以太网帧最多可进行14....
编码器是把角位移或直线位移转换成电信号的一种装置
编码器是把角位移或直线位移转换成电信号的一种装置。前者称为码盘,后者称码尺.按照读出方式编码器可以分....
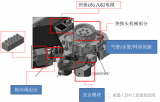
机器人的电机位置测量元件
转子 (3)通过旋转式变压器 (2)接受一个电压装置 (1)的供电 (频率 = 8kHz)。在定子线....

矢量发动机机械科技机械原理
使用推力矢量技术的飞机不仅其机动性大大提高,而且还具有前所未有的短距起落能力,这是因为使用推力矢量技....